Regeltechniek. Les 9: Systeemidentificatie en regelaarsinstelling. Prof. dr. ir. Toon van Waterschoot
|
|
|
- Jozef Sasbrink
- 4 jaren geleden
- Aantal bezoeken:
Transcriptie



1 Regeltechniek Les 9: Systeemidentificatie en regelaarsinstelling Prof. dr. ir. Toon van Waterschoot Faculteit Industriële Ingenieurswetenschappen ESAT Departement Elektrotechniek KU Leuven, Belgium
2 Regeltechniek: Vakinhoud Deel 1: Systeemtheorie Les 1: Inleiding en modelvorming Les 2: Signaaltransformaties Les 3: Systemen van eerste orde Les 4: Systemen van tweede & hogere orde en met dode tijd Deel 2: Analoge regeltechniek Les 5: De regelkring Les 6: Het wortellijnendiagram Les 7: De klassieke regelaars Les 8: Voorbeelden en toepassingen Les 9: Systeemidentificatie en regelaarsinstelling Les 10: Speciale regelstructuren Les 11: Niet-lineaire regeltechniek & aan-uit regelaars
3 Ele Les 9: Systeemidentificatie en regelaarsinstelling Systeemidentificatie en regelaarsinstelling [Baeten, REG1, Hoofdstuk 6] Trial & error regelaarsinstelling (niet in cursustekst!) Ziegler-Nichols regelaarsinstelling (niet in cursustekst!) Eenvoudige systeemidentificatiemethodes (niet in cursustekst!) Bedragsoptimum Symmetrisch optimum
4 Trial & error regelaarsinstelling Regeltjes: Stel eerst de P-waarde in zodat de standfout minimaal is en de regelaar na 2-3 slingeringen redelijk stabiel is (hoge versterking). Voer de I-waarde op totdat de regelaar redelijk snel op de goede eindwaarde komt. Stel de D-waarde in zodat de regelaar sneller op de gewenste waarde komt zonder dat de regeling te onrustig wordt.
5 Trial & error regelaarsinstelling Opmerking: Voor processen met veel storing bij een D-actie à gebruik PI regeling (bv. bij elektromotoren) Gegeven dat elke parameter (P,I,D) typisch kan variëren van 0,01 tot 100 en dat de vertragingstijden in het proces groot kunnen zijn kan dit een langdurige opgave zijn
6 Ele Les 9: Systeemidentificatie en regelaarsinstelling Systeemidentificatie en regelaarsinstelling [Baeten, REG1, Hoofdstuk 6] Trial & error regelaarsinstelling (niet in cursustekst!) Ziegler-Nichols regelaarsinstelling (niet in cursustekst!) Eenvoudige systeemidentificatiemethodes (niet in cursustekst!) Bedragsoptimum Symmetrisch optimum
7 Ziegler-Nichols regelaarsinstelling Empirische doelstellingen: verval ratio standfout = 0 D 1 D D 1 D 2 Step Response Ziegler-Nichols instelling geeft vuistregeltjes zodat aan bovenstaande doelstellingen tegemoet gekomen wordt Amplitude Time (sec)
8 Ziegler-Nichols regelaarsinstelling ZN instelling 1: Gebaseerd op stapresponsie van het ongeregelde systeem Bepaal experimenteel parameters 1,K p, v Step Response Step Response Amplitude K p Amplitude K p K p v Time (sec) v 1 Time (sec)
9 Ziegler-Nichols regelaarsinstelling Gebruik parameters voor regelaarsinstelling aan de hand van onderstaande tabel. P PI K r K p P = K r τ i τ τ 0,9τ τ I = K r τ i τ D = K r τ d τ τ K 0,9τ 3,3τ K - - τ K 3,3τ 2τ K 0,5τ 0,5K τ PID 1,2τ 1,2τ Let op met τ niet-lineariteiten: τ K Trade-off tussen 2τ kleine stap (onnauwkeurig vooral bij veel stoorsignalen) en grote stap (proces kan Let op met niet-lineariteiten: Trade-off tussen kleine stap (onnauwkeurig vooral bij veel stoorsignalen) en grote stap (proces kan anders reageren indien instelling te ver van het werkingspunt) Zie bv. ook Cohen en Coon tabel à andere formules [Tan, 2006], Comparison of some well-known PID tuning formulas
10 Ziegler-Nichols regelaarsinstelling ZN instelling 2: Gebaseerd op proportioneel geregeld systeem maak het geregelde systeem marginaal stabiel bepaal de volgende parameters (bv. a.h.v. staprespons): K m T p = 2 : versterking waarop het systeem marginaal stabiel is : periode van de oscillatie! p K r τ i τ d stel regelaar in volgens tabel: P PI PID K 2,0 K 2,2 K 1,7 - - T 1,2 T 2,0 - T 8,0
11 Ziegler-Nichols regelaarsinstelling Opmerkingen: De amplitude van de oscillaties hangt af van het proces en kan niet gecontroleerd worden à aanvaardbaar? Systeem marginaal stabiel maken zal niet kunnen tijdens productie! Let op voor stoorsignalen, andere in cascade geschakelde regelaars, tijdens de instelling Tijdens de instelling moeten de I en D actie van de regelaar afgezet worden à d =min en i = max Resultaat moet sinusoïdale oscillaties met constante amplitude geven, verwar niet met limietcycli ten gevolge van niet-lineariteiten. limietcycli = niet-sinusoïdale oscillaties met constante amplitude check regelaarsuitgang!!
12 Ziegler-Nichols regelaarsinstelling Opmerkingen: Omdat het een empirische methode is, worden de regelaarparameters niet optimaal geschat. Veel digitale regelaars kunnen zelfstandig een optimum vinden ( autotuning ). Hiervoor wordt vaak Ziegler-Nichols gebruikt. Tijdens de autotuning wordt de regelfunctie even uitgezet om de instelling te berekenen via een stapresponsie.
13 Ele Les 9: Systeemidentificatie en regelaarsinstelling Systeemidentificatie en regelaarsinstelling [Baeten, REG1, Hoofdstuk 6] Trial & error regelaarsinstelling (niet in cursustekst!) Ziegler-Nichols regelaarsinstelling (niet in cursustekst!) Eenvoudige systeemidentificatiemethodes (niet in cursustekst!) Bedragsoptimum Symmetrisch optimum
14 Eenvoudige systeemidentificatie Doelstelling: optimale regelaarsinstellingen hangen af van transfertfunctie van te regelen systeem bepalen van transfertfunctie op basis van gekend ingangsen opgemeten uitgangssignaal = systeemidentificatie Eenvoudige systeemidentificatie: berekening systeemparameters a.h.v. stapresponsie berekening systeemparameters a.h.v. Bodediagram Geavanceerde systeemidentificatie: keuze systeemmodel berekening optimale modelparameters komt aan bod in vak Digital Signal Processing-2 (MELO)
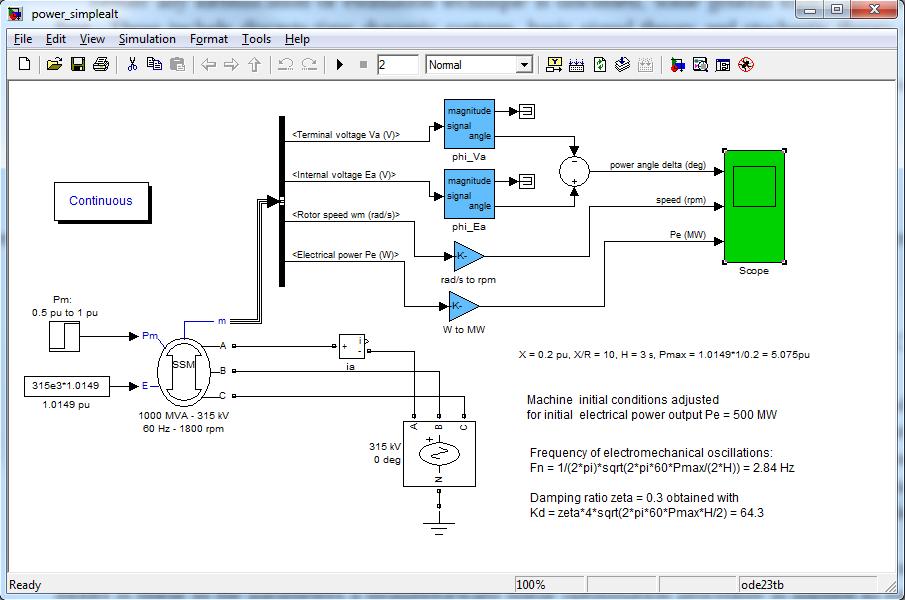
15 Eenvoudige systeemidentificatie Voorbeeld: generator (Matlab: power_simplealt)
16 Eenvoudige systeemidentificatie Berekening systeemparameters a.h.v. stapresponsie Eerste orde systeem heeft een herkenbare stapresponsie (bepaal τ en K grafisch, zie Ziegler-Nichols instelling) Tweede orde systeem met dode tijd kan onderstaande stapresponsies hebben Hogere orde systemen worden vaak benaderd door tweede orde systeem 1.6 Step Response 1 Step Response Amplitude Amplitude Time (sec) Time (sec)
17 Eenvoudige systeemidentificatie Voor een 2de orde systeem zonder doorschot ( 1) is de stapresponsie 73% bij t = v +1.3( ) [Cool,Schijff, Viersma,1991] Lineariseer de exponentiële functie om te vinden; v 1 kan makkelijk gevonden worden; kan dan berekend worden. 2 Step Response v +1.3( ) Amplitude % v 2 Time (sec)
18 Eenvoudige systeemidentificatie Een 2de orde systeem zonder doorschot ( 1) kan beschreven worden als een cascade van twee 1e orde systemen met tijdsconstanten 1 = 2 = Daaruit volgen de natuurlijke eigenpulsatie en dempingsfactor van het 2e orde systeem 1! n ( + p 2 1) 1 p! n ( 2 1)! n = 1 p 1 2, = p 1 2
19 Eenvoudige systeemidentificatie Voor een 2de orde systeem met doorschot ( < 1 ) bepalen we de dempingsfactor a.h.v. het doorschot D ln(d) = q 2 +ln 2 (D) en de gedempte eigenpulsatie! p = 2 T p! p a.h.v. oscillatieperiode T p
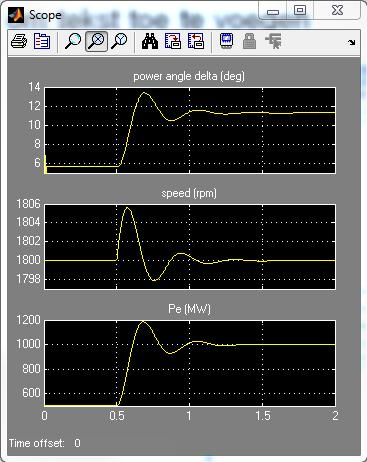
20 Eenvoudige systeemidentificatie Voorbeeld: Amplitude y D T Step Response K Mechanisch vermogen vb. : τ = 0 K = = 495 K = = 990 D = y K = = 0.37 K 495 Verband D and ζ ln D ζ = π + ln (D) = De gedempte eigenpulsatie kan bepaald worden door T =0.35 ms τ Time (sec) ω = ω 1 ζ ω = ω 1 ζ = 18 rad = s In de standaardvorm geeft dit ω K G s = s + 2ζω s + ω = s s ω = 2π 1 T = 2π2.86Hz = 18 rad/s
21 Eenvoudige systeemidentificatie Berekening systeemparameters a.h.v. Bodediagram: Leg een breedbandig ingangssignaal aan Meet uitgangssignaal op Teken Bodediagram Teken asymptoten, het snijpunt bepaalt de eigenfrequentie Indien daling asymptoot 20dB/decade à 1ste orde proces
22 Eenvoudige systeemidentificatie 2de orde proces: apple 1 à daling 40dB/decade voor frequenties na de Bode Diagram eigenfrequentie 0 > 1 à zie figuur -20 Magnitude (db) oplossing: p +1 (10p + 1)(100p + 1) Phase (deg) Frequency (rad/sec)
23 Eenvoudige systeemidentificatie Opmerking: in de meeste gevallen zijn de knie -punten niet zo makkelijk te vinden
24 Ele Les 9: Systeemidentificatie en regelaarsinstelling Systeemidentificatie en regelaarsinstelling [Baeten, REG1, Hoofdstuk 6] Trial & error regelaarsinstelling (niet in cursustekst!) Ziegler-Nichols regelaarsinstelling (niet in cursustekst!) Eenvoudige systeemidentificatiemethodes (niet in cursustekst!) Bedragsoptimum Symmetrisch optimum
25 Bedragsoptimum Doel? Regelaar ontwikkelen die snel, juist en zonder veel overgangsverschijnselen de gewenste waarde bereikt Hoe? Optimaliseren: bedragsoptimum symmetrisch optimum
26 Bedragsoptimum Beschouw de transfertfunctie van een 2de orde systeem: a 0 TF = H(p) = a 0 + a 1 p + a 2 p 2 Ideaal gedrag? TF(j!) =1 Waarom? regelaar volgt perfect referentie (geen vertraging, doorschot, ) Voorwaarde? s H(j!) = a 2 0 a 2 0 +!2 (a 2 1 2a 0 a 2 )+! 4 a 2 2 =1 Voldoende voorwaarden? a 2 =0ena 2 1 2a 0 a 2 =0
27 Bedragsoptimum Om zo lang mogelijk aan deze voorwaarde te voldoen, kiezen we a 1 = p 2a 0 a 2 Resultaat? a 0 H(p) opt = a 0 + p p 1 = q 2a 0 a 2 + p 2 a 2 2a 1+p 2 a 0 + p 2 Dit geeft! n = r 2a2 Door 2 = r a0 a 0 bij bedragsoptimum: en = p 1 =0.707 a 2 2 a 2 a 0 (= 4% doorschot) te stellen krijgen we de geslotenlus TF H(p) BO = 1 1+p2 + p 2 2 2
28 Bedragsoptimum Voor een regelkring met eenheidsterugkoppeling stemt dit overeen met een openlus TF 1 H(p) BO,open = p2 (1 + p ) De PID-parameters K r, i, d worden dan ingesteld om de volgende openlus TF te bekomen: K r (1 + d p) TF systeem = i p p2 (1 + p )
29 Bedragsoptimum Voorbeeld: staprespons van een regelkring geoptimaliseerd volgens BO enige vrije parameter bepaalt snelheid van systeem (~ tijdsconstante) 120 D = 4,3% Amplitude [%] ±2% t aan = 4,7 σ Tijd [ σ ] t uit = 8,4 σ
30 Bedragsoptimum Bij toepassing van een I-actie mag het systeem geen zuivere integrator bevatten om het BO te kunnen bepalen. De openlus TF bevat dan altijd 1 zuivere integrator: 1 H(p) BO,open = p2 (1 + p ) Bij PI- of PID-regelaar moet de I- of de D-actie respectievelijk de grootste en eventueel de 2 de grootste τ compenseren. Voor kan de som van (ongecompenseerde) kleinste τ genomen worden. Een BO geoptimaliseerde kring kan vereenvoudigd worden tot een 1 e orde systeem met =2
31 Bedragsoptimum Vuistregels bedragsoptimum: i d neem voor de grootste tijdsconstante van G neem voor de tweede grootste tijdsconstante neem voor σ de som van alle overige tijdsconstanten Oefeningen (thuis!): Baeten, REG1, Hoofdstuk 6, pagina 6.4
32 Ele Les 9: Systeemidentificatie en regelaarsinstelling Systeemidentificatie en regelaarsinstelling [Baeten, REG1, Hoofdstuk 6] Trial & error regelaarsinstelling (niet in cursustekst!) Ziegler-Nichols regelaarsinstelling (niet in cursustekst!) Eenvoudige systeemidentificatiemethodes (niet in cursustekst!) Bedragsoptimum Symmetrisch optimum
33 Symmetrisch optimum Beschouw een karakteristiek van 3 de orde systeem TF = H(p) = Ideaal gedrag? a 0 + pa 1 a 0 + pa 1 + p 2 a 2 + p 3 a 3 TF(!) =1 Voorwaarde? s H(j!) = a 2 0 +!2 a 2 1 a 2 0 +!2 (a 2 1 2a 0 a 2 )+! 4 (a 2 2 2a 1 a 3 )+! 6 a 2 3 =1
34 Symmetrisch optimum Voldoende voorwaarden? a 1 =0,a 3 =0,a 2 1 =2a 0 a 2 en a 2 2 =2a 1 a 3 ) a 3 = a 2 1 2a 0 2 2a 1 = a3 1 8a 2 0 Resultaat? H(p) opt = = 1+p a 1 a 0 1+p a 1 a 0 + p 2 a2 1 2a p 3 a3 1 8a p4 1+p4 + p p met 4 = a 1 a 0
35 Symmetrisch optimum Voor een systeem met eenheidsterugkoppeling wordt de openlus TF dan: 1+p4 H(p) SO,open = 8 2 p 2 (1 + p )
36 Symmetrisch optimum Snelheidsfout à 0 door dubbele integratie in gesloten lus Probleem: zeer groot doorschot (43,3%) Oplossing: vertraging ingangssignaal via filter met als tijdsconstante 4 zodat het nulpunt (differentiator) wordt ingeperkt!! Gevolg: 8.1% doorschot
37 Symmetrisch optimum Vuistregels bedragsoptimum: i d neem voor de grootste tijdsconstante van G neem voor de tweede grootste tijdsconstante neem voor σ de som van alle overige tijdsconstanten Oefeningen (thuis!): Baeten, REG1, Hoofdstuk 6, pagina 6.7
38 Samenvatting bedrags- en symmetrisch optimum BEDRAGSOPTIMUM soort regelaar eigenschappen van proces instelling regelaar P τ 1 >> σ K r = τ 1 /(2K p σ) SYMMETRISCH OPTIMUM PI τ 1 4σ PID τ 1 4(τ 2 + σ) PI PID integrator τ 1 of τ 1 > 4σ integrator τ 1 en τ 2 of τ 1 > 4(τ 2 + σ) Tabel 6.1: Keuze van regelaar en bijbehorende instelling. τ i = τ 1 K r = τ 1 /(2K p σ) τ i = τ 1 τ d = τ 2 K r = τ 1 /(2K p σ) τ i = 4σ K r = τ 1 /(2K p σ) τ i = 4σ τ d = τ 2 K r = τ 1 /(2K p σ)
39 Bijkomende literatuur (optioneel) Wen Tan, Jizhen Liu, Tongwen Chen, Horacio J. Marquez, Comparison of some well-known PID tuning formulas, Computers and Chemical Engineering, vol. 30, pp , (PDF op Toledo)
Meet- en Regeltechniek
 Meet- en Regeltechniek Les 9: Systeemidentificatie en regelaarsinstelling Prof. dr. ir. Toon van Waterschoot Faculteit Industriële Ingenieurswetenschappen ESAT Departement Elektrotechniek KU Leuven, Belgium
Meet- en Regeltechniek Les 9: Systeemidentificatie en regelaarsinstelling Prof. dr. ir. Toon van Waterschoot Faculteit Industriële Ingenieurswetenschappen ESAT Departement Elektrotechniek KU Leuven, Belgium
Hoofdstuk 6 Systeemidentificatie en Regelaarsinstelling
 Hoofdstuk 6 Systeemidentificatie en Regelaarsinstelling 6. Inleiding -- in aanmaak -- 6.2 Identificatie volgens Ziegler/Nichols, Instelling volgens Chien, Hrones en Reswick -- in aanmaak -- 6.3 Identificatie
Hoofdstuk 6 Systeemidentificatie en Regelaarsinstelling 6. Inleiding -- in aanmaak -- 6.2 Identificatie volgens Ziegler/Nichols, Instelling volgens Chien, Hrones en Reswick -- in aanmaak -- 6.3 Identificatie
Regeltechniek. Les 6: Het wortellijnendiagram. Prof. dr. ir. Toon van Waterschoot
 Regeltechniek Les 6: Het wortellijnendiagram Prof. dr. ir. Toon van Waterschoot Faculteit Industriële Ingenieurswetenschappen ESAT Departement Elektrotechniek KU Leuven, Belgium Regeltechniek: Vakinhoud
Regeltechniek Les 6: Het wortellijnendiagram Prof. dr. ir. Toon van Waterschoot Faculteit Industriële Ingenieurswetenschappen ESAT Departement Elektrotechniek KU Leuven, Belgium Regeltechniek: Vakinhoud
Meet- en Regeltechniek
 Meet- en egeltechniek Les 5: Het wortellijnendiagram Prof. dr. ir. Toon van Waterschoot Faculteit ndustriële ngenieurswetenschappen ESAT Departement Elektrotechniek KU Leuven, Belgium Meet- en egeltechniek:
Meet- en egeltechniek Les 5: Het wortellijnendiagram Prof. dr. ir. Toon van Waterschoot Faculteit ndustriële ngenieurswetenschappen ESAT Departement Elektrotechniek KU Leuven, Belgium Meet- en egeltechniek:
Meet- en Regeltechniek
 Meet- en Regeltechniek Les 7: De klassieke regelaars Prof. dr. ir. Toon van Waterschoot Faculteit Industriële Ingenieurswetenschappen ESAT Departement Elektrotechniek KU Leuven, Belgium Meet- en Regeltechniek:
Meet- en Regeltechniek Les 7: De klassieke regelaars Prof. dr. ir. Toon van Waterschoot Faculteit Industriële Ingenieurswetenschappen ESAT Departement Elektrotechniek KU Leuven, Belgium Meet- en Regeltechniek:
Meet- en Regeltechniek
 Meet- en Regeltechniek Les 11: Niet-lineaire regeltechniek en aan-uit regelaars Prof. dr. ir. Toon van Waterschoot Faculteit Industriële Ingenieurswetenschappen ESAT Departement Elektrotechniek KU Leuven,
Meet- en Regeltechniek Les 11: Niet-lineaire regeltechniek en aan-uit regelaars Prof. dr. ir. Toon van Waterschoot Faculteit Industriële Ingenieurswetenschappen ESAT Departement Elektrotechniek KU Leuven,
Meet- en Regeltechniek
 Meet- en Regeltechniek Les 2: De regelkring Prof. dr. ir. Toon van Waterschoot Faculteit Industriële Ingenieurswetenschappen ESAT Departement Elektrotechniek KU Leuven, Belgium Meet- en Regeltechniek:
Meet- en Regeltechniek Les 2: De regelkring Prof. dr. ir. Toon van Waterschoot Faculteit Industriële Ingenieurswetenschappen ESAT Departement Elektrotechniek KU Leuven, Belgium Meet- en Regeltechniek:
Regeltechniek Oefeningenbundel
 KATHOLIEKE HOGESCHOOL LIMBURG Departement Industriële wetenschappen en technologie Regeltechniek Oefeningenbundel REG- REG Dr ir J. Baeten 3 jaar Academische Bachelor Elektronica 3 jaar Academische Bachelor
KATHOLIEKE HOGESCHOOL LIMBURG Departement Industriële wetenschappen en technologie Regeltechniek Oefeningenbundel REG- REG Dr ir J. Baeten 3 jaar Academische Bachelor Elektronica 3 jaar Academische Bachelor
Meet- en Regeltechniek
 Meet- en Regeltechniek Les 4: De regelkring Prof. dr. ir. Toon van Waterschoot Faculteit Industriële Ingenieurswetenschappen ESAT Departement Elektrotechniek KU Leuven, Belgium Meet- en Regeltechniek:
Meet- en Regeltechniek Les 4: De regelkring Prof. dr. ir. Toon van Waterschoot Faculteit Industriële Ingenieurswetenschappen ESAT Departement Elektrotechniek KU Leuven, Belgium Meet- en Regeltechniek:
V: Identificatie en regelaarsinstelling
 1 Identificatie - algemeen Om een proces te kunnen regelen of te kunnen simuleren is het nodig de transfertfunctie te kennen. Deze transfertfunctie kan exact worden berekend indien alle onderdelen met
1 Identificatie - algemeen Om een proces te kunnen regelen of te kunnen simuleren is het nodig de transfertfunctie te kennen. Deze transfertfunctie kan exact worden berekend indien alle onderdelen met
Hoofdstuk 3 Het wortellijnendiagram
 Hoofdstuk 3 Het wortellijnendiagram 3. nleiding Het transiënt gedrag van een systeem wordt bepaald door de ligging van de wortels van de karakteristieke vergelijking (of door de polen van het gesloten
Hoofdstuk 3 Het wortellijnendiagram 3. nleiding Het transiënt gedrag van een systeem wordt bepaald door de ligging van de wortels van de karakteristieke vergelijking (of door de polen van het gesloten
II: De proportionele regelaar
 II: De proportionele regelaar Theoretische grondslagen. Inleiding Het algemeen schema van een proportionele regelaar die in de rechtstreekse tak staat is: X ( p) E ( p) G ( p) Y ( p ) Figuur II.: Proportionele
II: De proportionele regelaar Theoretische grondslagen. Inleiding Het algemeen schema van een proportionele regelaar die in de rechtstreekse tak staat is: X ( p) E ( p) G ( p) Y ( p ) Figuur II.: Proportionele
Schriftelijke zitting Systeem- en regeltechniek 2 (WB2207) 31 januari 2008 van 9:00 tot 12:00 uur
 31 januari 2008 van 9:00 tot 12:00 uur") Schriftelijke zitting Systeem- en regeltechniek 2 (WB227) 31 januari 28 van 9: tot 12: uur Onderstaande aanwijzingen nauwkeurig lezen. Vul op het voorblad uw naam, voorletters, studienummer en opleiding
Schriftelijke zitting Systeem- en regeltechniek 2 (WB227) 31 januari 28 van 9: tot 12: uur Onderstaande aanwijzingen nauwkeurig lezen. Vul op het voorblad uw naam, voorletters, studienummer en opleiding
Regeltechniek. Les 2: Signaaltransformaties. Prof. dr. ir. Toon van Waterschoot
 Regeltechniek Les 2: Signaaltransformaties Prof. dr. ir. Toon van Waterschoot Faculteit Industriële Ingenieurswetenschappen ESAT Departement Elektrotechniek KU Leuven, Belgium Regeltechniek: Tijdschema
Regeltechniek Les 2: Signaaltransformaties Prof. dr. ir. Toon van Waterschoot Faculteit Industriële Ingenieurswetenschappen ESAT Departement Elektrotechniek KU Leuven, Belgium Regeltechniek: Tijdschema
Meet- en Regeltechniek
 Meet- en Regeltechniek Les 1: Inleiding en modelvorming Prof. dr. ir. Toon van Waterschoot Faculteit Industriële Ingenieurswetenschappen ESAT Departement Elektrotechniek KU Leuven, Belgium Onderzoeksafdeling
Meet- en Regeltechniek Les 1: Inleiding en modelvorming Prof. dr. ir. Toon van Waterschoot Faculteit Industriële Ingenieurswetenschappen ESAT Departement Elektrotechniek KU Leuven, Belgium Onderzoeksafdeling
Schriftelijke zitting Systeem- en regeltechniek 2 (WB2207) 26 oktober 2010 van 14:00 tot 17:00 uur
 26 oktober 2010 van 14:00 tot 17:00 uur") Schriftelijke zitting Systeem- en regeltechniek 2 (WB2207) 26 oktober 2010 van 14:00 tot 17:00 uur Onderstaande aanwijzingen nauwkeurig lezen. Vul op het voorblad uw naam, voorletters, studienummer en
Schriftelijke zitting Systeem- en regeltechniek 2 (WB2207) 26 oktober 2010 van 14:00 tot 17:00 uur Onderstaande aanwijzingen nauwkeurig lezen. Vul op het voorblad uw naam, voorletters, studienummer en
Deeltentamen Meet en Regeltechniek 14 juni 1996
 Deeltentamen Meet en Regeltechniek 14 juni 1996 R0281 C:\Job\MC-word\Tentamens\Tent9606.doc 1 Gegeven: Van een verwarmingssysteem van een kamer zijn de volgende gegevens bekend: t 'Tkamer K1 Q0dW Q0 Qin
Deeltentamen Meet en Regeltechniek 14 juni 1996 R0281 C:\Job\MC-word\Tentamens\Tent9606.doc 1 Gegeven: Van een verwarmingssysteem van een kamer zijn de volgende gegevens bekend: t 'Tkamer K1 Q0dW Q0 Qin
Regeltechniek. Les 1: Inleiding en modelvorming. Prof. dr. ir. Toon van Waterschoot
 Regeltechniek Les 1: Inleiding en modelvorming Prof. dr. ir. Toon van Waterschoot Faculteit Industriële Ingenieurswetenschappen ESAT Departement Elektrotechniek KU Leuven, Belgium Onderzoeksafdeling STADIUS
Regeltechniek Les 1: Inleiding en modelvorming Prof. dr. ir. Toon van Waterschoot Faculteit Industriële Ingenieurswetenschappen ESAT Departement Elektrotechniek KU Leuven, Belgium Onderzoeksafdeling STADIUS
Berekenen van regelaars
 Hoofdstuk 4 Berekenen van regelaars Doelstellingen 1. Regelaars kunnen berekenen voor stap- en sinusresponsies 2. Basiseigenschappen van een aantal regelaars kennen 4.1 Eigenschappen van een regelkring
Hoofdstuk 4 Berekenen van regelaars Doelstellingen 1. Regelaars kunnen berekenen voor stap- en sinusresponsies 2. Basiseigenschappen van een aantal regelaars kennen 4.1 Eigenschappen van een regelkring
Meet- en Regeltechniek
 Meet- en Regeltechniek Les 1: Inleiding en modelvorming Prof. dr. ir. Toon van Waterschoot Faculteit Industriële Ingenieurswetenschappen ESAT Departement Elektrotechniek KU Leuven, Belgium Onderzoeksafdeling
Meet- en Regeltechniek Les 1: Inleiding en modelvorming Prof. dr. ir. Toon van Waterschoot Faculteit Industriële Ingenieurswetenschappen ESAT Departement Elektrotechniek KU Leuven, Belgium Onderzoeksafdeling
Examen Regeltechniek Take Home derde examenperiode
 Examen Regeltechniek Take Home derde examenperiode Vraag 1 Guust wil een proces regelen dat aangestuurd wordt door een actuator die gevoed wordt met een spanning tussen 0 (=0%) en 10 (=100%) Volt. De procesuitgang
Examen Regeltechniek Take Home derde examenperiode Vraag 1 Guust wil een proces regelen dat aangestuurd wordt door een actuator die gevoed wordt met een spanning tussen 0 (=0%) en 10 (=100%) Volt. De procesuitgang
Automatisering. Wat is een regelsysteem
 Automatisering Analoge Regeltechniek: inleiding en modelvorming Wat is een regelsysteem In zijn eenvoudigste vorm geeft een regelsysteem een uitgangssignaal (responsie) voor een gegeven ingangssignaal
Automatisering Analoge Regeltechniek: inleiding en modelvorming Wat is een regelsysteem In zijn eenvoudigste vorm geeft een regelsysteem een uitgangssignaal (responsie) voor een gegeven ingangssignaal
Schriftelijke zitting Systeem- en regeltechniek 2 (WB2207) Oefententamen
 Oefententamen") Schriftelijke zitting Systeem- en regeltechniek 2 (WB2207) Oefententamen Onderstaande aanwijzingen nauwkeurig lezen. Vul op het voorblad uw naam, voorletters en studienummer in. Dit tentamen bestaat uit
Schriftelijke zitting Systeem- en regeltechniek 2 (WB2207) Oefententamen Onderstaande aanwijzingen nauwkeurig lezen. Vul op het voorblad uw naam, voorletters en studienummer in. Dit tentamen bestaat uit
Gevorderde onderwerpen
 Hoofdstuk 5 Gevorderde onderwerpen Doelstellingen 1. Weten wat M-cirkels voorstellen en de functie ervan begrijpen 2. Bodediagram van een algemene transfertfunctie kunnen tekenen 3. Begrijpen dat een regelaar
Hoofdstuk 5 Gevorderde onderwerpen Doelstellingen 1. Weten wat M-cirkels voorstellen en de functie ervan begrijpen 2. Bodediagram van een algemene transfertfunctie kunnen tekenen 3. Begrijpen dat een regelaar
Schriftelijke zitting Systeem- en regeltechniek 2 (WB2207) 31 oktober 2006 van 14:00 tot 17:00 uur
 31 oktober 2006 van 14:00 tot 17:00 uur") Schriftelijke zitting Systeem- en regeltechniek 2 (WB2207) 31 oktober 2006 van 14:00 tot 17:00 uur Onderstaande aanwijzingen nauwkeurig lezen. Vul op het voorblad uw naam, voorletters, studienummer en
Schriftelijke zitting Systeem- en regeltechniek 2 (WB2207) 31 oktober 2006 van 14:00 tot 17:00 uur Onderstaande aanwijzingen nauwkeurig lezen. Vul op het voorblad uw naam, voorletters, studienummer en
KATHOLIEKE HOGESCHOOL LIMBURG. Automatisering. Regeltechniek. Deel I. Basis Regeltechniek. Dr ir J. Baeten. cursus gedoceerd aan
 KATHOLIEKE HOGESCHOOL LIMBURG Departement Industriële wetenschappen en technologie Automatisering Regeltechniek Deel I Basis Regeltechniek Dr ir J. Baeten cursus gedoceerd aan 3 jaar Academische Bachelor
KATHOLIEKE HOGESCHOOL LIMBURG Departement Industriële wetenschappen en technologie Automatisering Regeltechniek Deel I Basis Regeltechniek Dr ir J. Baeten cursus gedoceerd aan 3 jaar Academische Bachelor
Schriftelijke zitting Systeem- en regeltechniek 2 (WB2207) 29 januari 2009 van 14:00 tot 17:00 uur
 29 januari 2009 van 14:00 tot 17:00 uur") Schriftelijke zitting Systeem- en regeltechniek 2 (WB2207) 29 januari 2009 van 14:00 tot 17:00 uur Onderstaande aanwijzingen nauwkeurig lezen. Vul op het voorblad uw naam, voorletters, studienummer en
Schriftelijke zitting Systeem- en regeltechniek 2 (WB2207) 29 januari 2009 van 14:00 tot 17:00 uur Onderstaande aanwijzingen nauwkeurig lezen. Vul op het voorblad uw naam, voorletters, studienummer en
Schriftelijke zitting Regeltechniek (WB2207) 3 november 2011 van 9:00 tot 12:00 uur
 3 november 2011 van 9:00 tot 12:00 uur") Schriftelijke zitting Regeltechniek (WB2207) 3 november 2011 van 9:00 tot 12:00 uur Onderstaande aanwijzingen nauwkeurig lezen. Vul op het voorblad uw naam, voorletters, studienummer en opleiding in. Dit
Schriftelijke zitting Regeltechniek (WB2207) 3 november 2011 van 9:00 tot 12:00 uur Onderstaande aanwijzingen nauwkeurig lezen. Vul op het voorblad uw naam, voorletters, studienummer en opleiding in. Dit
Systeemtheorie. Hoofdstuk 3. 3.1 Signalen aan de ingang
 Hoofdstuk 3 Systeemtheorie Doelstellingen. Weten welke signalen men aan de ingang kan aanleggen om de reactie van een systeem te bestuderen 2. Weten wat een Bode en Nyquistdiagram voorstellen en deze diagramma
Hoofdstuk 3 Systeemtheorie Doelstellingen. Weten welke signalen men aan de ingang kan aanleggen om de reactie van een systeem te bestuderen 2. Weten wat een Bode en Nyquistdiagram voorstellen en deze diagramma
0.1. INVLOED VAN DE K-WAARDE OP DE STABILITEIT VAN GESLOTEN KETENS Invloed van de K-waarde op de stabiliteit van gesloten ketens
 0.1. INVLOED VAN DE K-WAARDE OP DE STABILITEIT VAN GESLOTEN KETENS1 Addendum 2 0.1 Invloed van de K-waarde op de stabiliteit van gesloten ketens We laten de K-waarde veranderen en kijken naar de stabiliteit.
0.1. INVLOED VAN DE K-WAARDE OP DE STABILITEIT VAN GESLOTEN KETENS1 Addendum 2 0.1 Invloed van de K-waarde op de stabiliteit van gesloten ketens We laten de K-waarde veranderen en kijken naar de stabiliteit.
Opleiding ELEKTROMECHANICA optie Automatisatie LAB Labo Regeltechniek KLAS: 2AUa Academiejaar
 en Doorniksesteenweg 145-8500 KORTRIJK - Tel. : (056)26 41 20 - Fax : (056)21 98 67 - E-mail: elektromechanica@katho.be w w w. k a t h o. b e / v h t i / e l e k t r o m e c h a n i c a Opleiding ELEKTROMECHANICA
en Doorniksesteenweg 145-8500 KORTRIJK - Tel. : (056)26 41 20 - Fax : (056)21 98 67 - E-mail: elektromechanica@katho.be w w w. k a t h o. b e / v h t i / e l e k t r o m e c h a n i c a Opleiding ELEKTROMECHANICA
WERKBOEK DEEL 2: REGELKRING
 ACTA-SIM WERKBOEK DEEL 2: REGELKRING J. BAS & C. CLERX Aanpassing J. Baeten pag. 1 1 HET INSTRUMENTATIESCHEMA...3 1.1 SYMBOLEN...3 1.2 OEFENINGEN...4 2 NIVEAUREGELKRING...5 2.1 DOELSTELLINGEN...5 2.2 GEBRUIKERS
ACTA-SIM WERKBOEK DEEL 2: REGELKRING J. BAS & C. CLERX Aanpassing J. Baeten pag. 1 1 HET INSTRUMENTATIESCHEMA...3 1.1 SYMBOLEN...3 1.2 OEFENINGEN...4 2 NIVEAUREGELKRING...5 2.1 DOELSTELLINGEN...5 2.2 GEBRUIKERS
Katholieke Hogeschool Limburg. Beknopte inleiding tot de regeltechniek
 Katholieke Hogeschool Limburg Beknopte inleiding tot de regeltechniek Johan Baeten Cursus gedoceerd aan 3e jaar Industrieel Ingenieur Chemie 27 september 2003 c Katholieke Hogeschool Limburg Departement
Katholieke Hogeschool Limburg Beknopte inleiding tot de regeltechniek Johan Baeten Cursus gedoceerd aan 3e jaar Industrieel Ingenieur Chemie 27 september 2003 c Katholieke Hogeschool Limburg Departement
Schriftelijke zitting Systeem- en regeltechniek 2 (WB2207) 18 januari 2010 van 14:00 tot 17:00 uur
 18 januari 2010 van 14:00 tot 17:00 uur") Schriftelijke zitting Systeem- en regeltechniek 2 (WB2207) 18 januari 2010 van 14:00 tot 17:00 uur Onderstaande aanwijzingen nauwkeurig lezen. Vul op het voorblad uw naam, voorletters, studienummer en
Schriftelijke zitting Systeem- en regeltechniek 2 (WB2207) 18 januari 2010 van 14:00 tot 17:00 uur Onderstaande aanwijzingen nauwkeurig lezen. Vul op het voorblad uw naam, voorletters, studienummer en
Katholieke Hogeschool Limburg. Beknopte inleiding tot de regeltechniek
 Katholieke Hogeschool Limburg Beknopte inleiding tot de regeltechniek Johan Baeten Cursus gedoceerd aan 3e jaar Academische Bachelor Chemie / Biochemie Brugjaar Chemie 16 juni 2005 c Katholieke Hogeschool
Katholieke Hogeschool Limburg Beknopte inleiding tot de regeltechniek Johan Baeten Cursus gedoceerd aan 3e jaar Academische Bachelor Chemie / Biochemie Brugjaar Chemie 16 juni 2005 c Katholieke Hogeschool
Tentamen Inleiding Meten Vakcode 8E020 22 april 2009, 9.00-12.00 uur
 Tentamen Inleiding Meten Vakcode 8E april 9, 9. -. uur Dit tentamen bestaat uit opgaven. Indien u een opgave niet kunt maken, geeft u dan aan hoe u de opgave zou maken. Dat kan een deel van de punten opleveren.
Tentamen Inleiding Meten Vakcode 8E april 9, 9. -. uur Dit tentamen bestaat uit opgaven. Indien u een opgave niet kunt maken, geeft u dan aan hoe u de opgave zou maken. Dat kan een deel van de punten opleveren.
Elektronische basisschakelingen Oefenzitting 3.
 Elektronische basisschakelingen Oefenzitting 3 Pieter.Gijsenbergh@esat.kuleuven.be Doelstellingen Frequentiegedrag van ideale opampschakelingen in feedback Invloed van reële opamps op dit frequentiegedrag
Elektronische basisschakelingen Oefenzitting 3 Pieter.Gijsenbergh@esat.kuleuven.be Doelstellingen Frequentiegedrag van ideale opampschakelingen in feedback Invloed van reële opamps op dit frequentiegedrag
EXAMENFOLDER maandag 26 januari 2015 OPLOSSINGEN. Vraag 1: Een gelijkstroomnetwerk (20 minuten - 2 punten)
") Universiteit Gent naam: Faculteit Ingenieurswetenschappen en Architectuur voornaam: de Bachelor Ingenieurswetenschappen richting: Opties C,, TN en W prof. Kristiaan Neyts Academiejaar 4-5 erste xamenperiode
Universiteit Gent naam: Faculteit Ingenieurswetenschappen en Architectuur voornaam: de Bachelor Ingenieurswetenschappen richting: Opties C,, TN en W prof. Kristiaan Neyts Academiejaar 4-5 erste xamenperiode
MEET- EN REGELTECHNIEK ir. Bart Schotsman
 Week 1: Introductie regeltechniek ArcelorMital, walsen van staal https://www.youtube.com/watch?v=xao1zsvo8pc https://www.youtube.com/watch?v=zhi--waaxy0 MEET- EN REGELTECHNIEK ir. Bart Schotsman Week 1:
Week 1: Introductie regeltechniek ArcelorMital, walsen van staal https://www.youtube.com/watch?v=xao1zsvo8pc https://www.youtube.com/watch?v=zhi--waaxy0 MEET- EN REGELTECHNIEK ir. Bart Schotsman Week 1:
De transferfunctie of de versterkingsfactor van een schakeling is gelijk aan de verhouding van de uitgangsspanning op de ingangsspanning.
 NETWEKEN. FITETECHNIEK.. Soorten Filters aagdoorlaatfilters Hoogdoorlaatfilters Banddoolaatfilters Bandsperfilters Wienbrug filter Alle filters kunnen zowel worden uitgevoerd met weerstanden en condensatoren
NETWEKEN. FITETECHNIEK.. Soorten Filters aagdoorlaatfilters Hoogdoorlaatfilters Banddoolaatfilters Bandsperfilters Wienbrug filter Alle filters kunnen zowel worden uitgevoerd met weerstanden en condensatoren
Oplossingen tentamen Systeemanalyse voor BMT (8E030) 26 januari 2007
 26 januari 2007") Oplossingen tentamen Systeemanalyse voor BMT (8E3) 6 januari 7 Onderdelen die érg moeilijk bleken te zijn (< % juiste antwoord) zijn met een *) gemarkeerd. Hierbij wordt ook vermeld in welke oefenopgave(n)
Oplossingen tentamen Systeemanalyse voor BMT (8E3) 6 januari 7 Onderdelen die érg moeilijk bleken te zijn (< % juiste antwoord) zijn met een *) gemarkeerd. Hierbij wordt ook vermeld in welke oefenopgave(n)
V: Snelheidsregeling van DC-motor
 V: Snelheidsregeling van DCmotor 1 Inleiding Deze laboproef omvat de snelheidsregeling van een klein DCmotortje. De motor wordt aangestuurd via een vermogentrap die een Hbrug bevat. De Tacho geeft de sneldheid
V: Snelheidsregeling van DCmotor 1 Inleiding Deze laboproef omvat de snelheidsregeling van een klein DCmotortje. De motor wordt aangestuurd via een vermogentrap die een Hbrug bevat. De Tacho geeft de sneldheid
Oplossing. Vraag 1. De hoogte h(t) van het waterniveau wordt gegeven door. A met D(t) in [m³/s], h in [m] en A = 2m². Gegeven: D(t) = 6 (t-3)
![Oplossing. Vraag 1. De hoogte h(t) van het waterniveau wordt gegeven door. A met D(t) in [m³/s], h in [m] en A = 2m². Gegeven: D(t) = 6 (t-3)](/thumbs/95/126444531.jpg "Oplossing. Vraag 1. De hoogte h(t) van het waterniveau wordt gegeven door. A met D(t) in [m³/s], h in [m] en A = 2m². Gegeven: D(t) = 6 (t-3)") Eamen -Systeemtheorie januari 7, 8.3u, 9 Het eamen is schriftelijk. De student krijgt 3 uur tijd, dus afgeven ten laatste om.3u. Er ijn 8 vragen, gespreid over bladen. Op elke vraag staan evenveel punten.
Eamen -Systeemtheorie januari 7, 8.3u, 9 Het eamen is schriftelijk. De student krijgt 3 uur tijd, dus afgeven ten laatste om.3u. Er ijn 8 vragen, gespreid over bladen. Op elke vraag staan evenveel punten.
I: Studie van eerste en tweede orde systemen
 I: Studie van eerste en tweede orde systemen Het eerste orde systeem. Inleiding Neem het elektrisch systeem van eerste orde uit figuur I.. De relatie tussen V (t) en V (t) wordt weergegeven door volgende
I: Studie van eerste en tweede orde systemen Het eerste orde systeem. Inleiding Neem het elektrisch systeem van eerste orde uit figuur I.. De relatie tussen V (t) en V (t) wordt weergegeven door volgende
Materialen in de elektronica Verslag Practicum 1
 Materialen in de elektronica Verslag Practicum 1 Academiejaar 2014-2015 Groep 2 Sander Cornelis Stijn Cuyvers In dit practicum zullen we de diëlektrische eigenschappen van een vloeibaar kristal bepalen.
Materialen in de elektronica Verslag Practicum 1 Academiejaar 2014-2015 Groep 2 Sander Cornelis Stijn Cuyvers In dit practicum zullen we de diëlektrische eigenschappen van een vloeibaar kristal bepalen.
Digitale systemen. Hoofdstuk 6. 6.1 De digitale regelaar
 Hoofdstuk 6 Digitale systemen Doelstellingen 1. Weten dat digitale systemen andere stabiliteitsvoorwaarden hebben In deze tijd van digitalisatie is het gebruik van computers in regelkringen alom.denk maar
Hoofdstuk 6 Digitale systemen Doelstellingen 1. Weten dat digitale systemen andere stabiliteitsvoorwaarden hebben In deze tijd van digitalisatie is het gebruik van computers in regelkringen alom.denk maar
Meet- en Regeltechniek
 Meet- en Regeltechniek Les 2: Systemen van eerste orde Prof. dr. ir. Toon van Waterschoot Faculteit Industriële Ingenieurswetenschaen ESAT Deartement Elektrotechniek KU Leuven, Belgium Meet- en Regeltechniek:
Meet- en Regeltechniek Les 2: Systemen van eerste orde Prof. dr. ir. Toon van Waterschoot Faculteit Industriële Ingenieurswetenschaen ESAT Deartement Elektrotechniek KU Leuven, Belgium Meet- en Regeltechniek:
Hoofdstuk 2 De regelkring
 Hoofdstuk 2 De regelkring 2. Inleiding De cursus Systeemtheorie beschrijft het gedrag van een systeem. Deze kennins ligt aan de basis voor het regelen van een systeem. Bovendien kan men slechts besluiten
Hoofdstuk 2 De regelkring 2. Inleiding De cursus Systeemtheorie beschrijft het gedrag van een systeem. Deze kennins ligt aan de basis voor het regelen van een systeem. Bovendien kan men slechts besluiten
Uitwerking studie stimulerende toets Embedded Signal Processing (ESP)
") Uitwerking studie stimulerende toets Embedded Signal Processing (ESP) Cursus code 259, Dinsdag 7 maart 29, 3:3h 7:h. U mag gebruiken: uw eigen aantekeningen, de uitgeprinte college sheets van Teletop en
Uitwerking studie stimulerende toets Embedded Signal Processing (ESP) Cursus code 259, Dinsdag 7 maart 29, 3:3h 7:h. U mag gebruiken: uw eigen aantekeningen, de uitgeprinte college sheets van Teletop en
Bewegingen en Trillingen. Nokkenmechanisme: deel B
 Katholieke Universiteit Leuven Faculteit Ingenieurswetenschappen Departement Werktuigkunde Bewegingen en Trillingen Nokkenmechanisme: deel B Groepsnummer 35 Jan-Pieter Jacobs Christophe Mestdag 1 Inhoudsopgave
Katholieke Universiteit Leuven Faculteit Ingenieurswetenschappen Departement Werktuigkunde Bewegingen en Trillingen Nokkenmechanisme: deel B Groepsnummer 35 Jan-Pieter Jacobs Christophe Mestdag 1 Inhoudsopgave
Theory DutchBE (Belgium) Niet-lineaire dynamica in elektrische schakelingen (10 punten)
 Niet-lineaire dynamica in elektrische schakelingen (10 punten)") Q2-1 Niet-lineaire dynamica in elektrische schakelingen (10 punten) Neem voor het begin van deze opgave de algemene instructies uit de aparte enveloppe door! Inleiding Bistabiele niet-lineaire halfgeleider
Q2-1 Niet-lineaire dynamica in elektrische schakelingen (10 punten) Neem voor het begin van deze opgave de algemene instructies uit de aparte enveloppe door! Inleiding Bistabiele niet-lineaire halfgeleider
Werking en verklaring van enkele basisbegrippen van de proportionele regelaar
 Werking en verklaring van enkele basisbegrippen van de proportionele regelaar Ronny Rooman 1 Inleiding Van alle PID regelaars is de zuivere proportionele regelaar ( P regelaar) het eenvoudigste algorithme.
Werking en verklaring van enkele basisbegrippen van de proportionele regelaar Ronny Rooman 1 Inleiding Van alle PID regelaars is de zuivere proportionele regelaar ( P regelaar) het eenvoudigste algorithme.
Kennisdossier Regeltechniek
 Kennisdossier Regeltechniek Paul Stefaan Mooij Ruud Alderden Sander Rijnsaardt Ashwien Chotoe 1 Inleiding Dit kennisdossier is opgebouwd uit oude meet resultaten van proef 6. En met behulp van zowel Matlab
Kennisdossier Regeltechniek Paul Stefaan Mooij Ruud Alderden Sander Rijnsaardt Ashwien Chotoe 1 Inleiding Dit kennisdossier is opgebouwd uit oude meet resultaten van proef 6. En met behulp van zowel Matlab
Elektronische basisschakelingen: Oefenzitting 1
 Elektronische basisschakelingen: Oefenzitting 1 Aki Sarafianos (aki.sarafianos@esat.kuleuven.be) ESAT 91.22 October 21, 2013 Formuleoverzicht In zitting 1 en 2 worden volgende constanten en modellen gebruikt:
Elektronische basisschakelingen: Oefenzitting 1 Aki Sarafianos (aki.sarafianos@esat.kuleuven.be) ESAT 91.22 October 21, 2013 Formuleoverzicht In zitting 1 en 2 worden volgende constanten en modellen gebruikt:
REGELAAR. W- --i. x PROCES. Fig. 10.1 Blokschema geslolen regelkring
 ~~@~ l]@ Optimaliseren van regelkringen s W- --i REGELAAR OPTIMALISEREN VAN REGELKRINGEN x y recorder Fig. 10.1 Blokschema geslolen regelkring De regelaar moet in alle omstandigheden
~~@~ l]@ Optimaliseren van regelkringen s W- --i REGELAAR OPTIMALISEREN VAN REGELKRINGEN x y recorder Fig. 10.1 Blokschema geslolen regelkring De regelaar moet in alle omstandigheden
! Dit kernbetrekkingenblad heb ik voor eigen gebruik gemaakt en kan dus incompleet zijn en fouten bevatten! Efficiency
 Kernbetrekkingen Mechatronisch Ontwerpen 280302 E. Boesveld 27062010! Dit kernbetrekkingenblad heb ik voor eigen gebruik gemaakt en kan dus incompleet zijn en fouten bevatten! Energie, vermogen, etc P=vermogen
Kernbetrekkingen Mechatronisch Ontwerpen 280302 E. Boesveld 27062010! Dit kernbetrekkingenblad heb ik voor eigen gebruik gemaakt en kan dus incompleet zijn en fouten bevatten! Energie, vermogen, etc P=vermogen
Trillingen en geluid wiskundig
 Trillingen en geluid wiskundig 1 De sinus van een hoek 2 Radialen 3 Uitwijking van een harmonische trilling 4 Macht en logaritme 5 Geluidsniveau en amplitude 1 De sinus van een hoek Sinus van een hoek
Trillingen en geluid wiskundig 1 De sinus van een hoek 2 Radialen 3 Uitwijking van een harmonische trilling 4 Macht en logaritme 5 Geluidsniveau en amplitude 1 De sinus van een hoek Sinus van een hoek
1. Langere vraag over de theorie
 . Langere vraag over de theorie. Bereken het magneetveld dat veroorzaakt wordt door een lange, cilindervormige stroomvoerende geleider met straal R en stroom (uniforme stroomdichtheid) en dit zowel binnen
. Langere vraag over de theorie. Bereken het magneetveld dat veroorzaakt wordt door een lange, cilindervormige stroomvoerende geleider met straal R en stroom (uniforme stroomdichtheid) en dit zowel binnen
PROJECT 1: Kinematics of a four-bar mechanism
 KINEMATICA EN DYNAMICA VAN MECHANISMEN PROJECT 1: Kinematics of a four-bar mechanism Lien De Dijn en Celine Carbonez 3 e bachelor in de Ingenieurswetenschappen: Werktuigkunde-Elektrotechniek Prof. Dr.
KINEMATICA EN DYNAMICA VAN MECHANISMEN PROJECT 1: Kinematics of a four-bar mechanism Lien De Dijn en Celine Carbonez 3 e bachelor in de Ingenieurswetenschappen: Werktuigkunde-Elektrotechniek Prof. Dr.
Figuur 1: Blok-schema van een DC motor, a) Geef de overdrachtsfuntie G(s) = T(s)/V(s). Schrijf G(s) in de vorm K B(s) A( s
 Geef de overdrachtsfuntie G(s) = T(s)/V(s). Schrijf G(s) in de vorm K B(s) A( s") 1. Een blok-schema van een DC motor is gegeven in figuur 1. Vis) 1 m 1 Ls+R Js+b (0(5) K, Figuur 1: Blok-schema van een DC motor, a) Geef de overdrachtsfuntie G(s) = T(s)/V(s). Schrijf G(s) in de vorm
1. Een blok-schema van een DC motor is gegeven in figuur 1. Vis) 1 m 1 Ls+R Js+b (0(5) K, Figuur 1: Blok-schema van een DC motor, a) Geef de overdrachtsfuntie G(s) = T(s)/V(s). Schrijf G(s) in de vorm
Oefenzitting 3: Simulink Dynamisch gedrag van een proces
 Oefenzitting 3: Simulink Dynamisch gedrag van een proces Voor de oefenzittingen Regeltechniek maken we gebruik van de software-omgeving Matlab. Met Matlab kunnen diverse berekeningen worden gemaakt, matrices
Oefenzitting 3: Simulink Dynamisch gedrag van een proces Voor de oefenzittingen Regeltechniek maken we gebruik van de software-omgeving Matlab. Met Matlab kunnen diverse berekeningen worden gemaakt, matrices
Handleiding PI practicum PAO cursus Slimmer Waterbeheer met Real-Time Control, maart 2016
 Handleiding PI practicum PAO cursus Slimmer Waterbeheer met Real-Time Control, 15-16 maart 2016 R. R. P. van Nooijen. 14 maart 2016 Samenvatting PI practicum handleiding PAO cursus Slimmer Waterbeheer
Handleiding PI practicum PAO cursus Slimmer Waterbeheer met Real-Time Control, 15-16 maart 2016 R. R. P. van Nooijen. 14 maart 2016 Samenvatting PI practicum handleiding PAO cursus Slimmer Waterbeheer
1. Een magnetische levitatie systeem is schematisch weergegeven in figuur 1. r-- ~ rail
 1. Een magnetische levitatie systeem is schematisch weergegeven in figuur 1. r-- ~ rail I FR.ir~.P Y D I ti t. I ~- ji ti! Fdist I I I I I magnat Fgray current i Figuur 1: Een schematische weergave van
1. Een magnetische levitatie systeem is schematisch weergegeven in figuur 1. r-- ~ rail I FR.ir~.P Y D I ti t. I ~- ji ti! Fdist I I I I I magnat Fgray current i Figuur 1: Een schematische weergave van
Procesbeheersing. Eigenschappen van processen
 Procesbeheersing Eigenschappen van processen Dode tijd τ v (uitspraak Tau-Vee) τ v = Dode tijd, voortplantingstijd en looptijd Dode tijd Bereken τ v φ = V / τ dus τ = V / φ V = ¼ π d 2 l dus τ = (¼ π d
Procesbeheersing Eigenschappen van processen Dode tijd τ v (uitspraak Tau-Vee) τ v = Dode tijd, voortplantingstijd en looptijd Dode tijd Bereken τ v φ = V / τ dus τ = V / φ V = ¼ π d 2 l dus τ = (¼ π d
Praktische regeltechniek voor de procesindustrie
 Praktische regeltechniek voor de procesindustrie Praktische regeltechniek voor de procesindustrie M.M.H. Starmans & G.J. Siemons Schrijver: M.M.H. Starmans Coverontwerp: M.M.H. Starmans ISBN: 9789402162196
Praktische regeltechniek voor de procesindustrie Praktische regeltechniek voor de procesindustrie M.M.H. Starmans & G.J. Siemons Schrijver: M.M.H. Starmans Coverontwerp: M.M.H. Starmans ISBN: 9789402162196
Klassieke en Kwantummechanica (EE1P11)
") Maandag 3 oktober 2016, 9.00 11.00 uur; DW-TZ 2 TECHNISCHE UNIVERSITEIT DELFT Faculteit Elektrotechniek, Wiskunde en Informatica Opleiding Elektrotechniek Aanwijzingen: Er zijn 2 opgaven in dit tentamen.
Maandag 3 oktober 2016, 9.00 11.00 uur; DW-TZ 2 TECHNISCHE UNIVERSITEIT DELFT Faculteit Elektrotechniek, Wiskunde en Informatica Opleiding Elektrotechniek Aanwijzingen: Er zijn 2 opgaven in dit tentamen.
Verbanden en functies
 Verbanden en functies 0. voorkennis Stelsels vergelijkingen Je kunt een stelsel van twee lineaire vergelijkingen met twee variabelen oplossen. De oplossing van het stelsel is het snijpunt van twee lijnen.
Verbanden en functies 0. voorkennis Stelsels vergelijkingen Je kunt een stelsel van twee lineaire vergelijkingen met twee variabelen oplossen. De oplossing van het stelsel is het snijpunt van twee lijnen.
Tentamen Systeemanalyse (113117)
") Systeemanalyse (113117) 1/6 Vooraf Tentamen Systeemanalyse (113117) 17 augustus 2010, 8:45 12:15 uur Dit is een open boek tentamen, hetgeen betekent dat gebruik mag worden gemaakt van het dictaat Systeemanalyse
Systeemanalyse (113117) 1/6 Vooraf Tentamen Systeemanalyse (113117) 17 augustus 2010, 8:45 12:15 uur Dit is een open boek tentamen, hetgeen betekent dat gebruik mag worden gemaakt van het dictaat Systeemanalyse
Tentamen Inleiding Meten en Modelleren Vakcode 8C120 7 april 2010, uur. Het gebruik van een (grafische) rekenmachine is toegestaan.
 rekenmachine is toegestaan.") Tentamen Inleiding Meten en Modelleren Vakcode 8C1 7 april 1, 9. - 1. uur Dit tentamen bestaat uit 4 opgaven. Indien u een opgave niet kunt maken, geeft u dan aan hoe u de opgave zou maken. Dat kan een
Tentamen Inleiding Meten en Modelleren Vakcode 8C1 7 april 1, 9. - 1. uur Dit tentamen bestaat uit 4 opgaven. Indien u een opgave niet kunt maken, geeft u dan aan hoe u de opgave zou maken. Dat kan een
Dit tentamen bestaat uit vier opgaven verdeeld over drie bladzijden. U heeft drie uur de tijd.
 Tentamen Signaal Verwerking en Ruis Dinsdag 10 13 uur, 15 december 2009 Dit tentamen bestaat uit vier opgaven verdeeld over drie bladzijden. U heeft drie uur de tijd. 1. Staprespons van een filter [elk
Tentamen Signaal Verwerking en Ruis Dinsdag 10 13 uur, 15 december 2009 Dit tentamen bestaat uit vier opgaven verdeeld over drie bladzijden. U heeft drie uur de tijd. 1. Staprespons van een filter [elk
2.1 Twee gekoppelde oscillatoren zonder aandrijving
 Hoofdstuk Twee gekoppelde oscillatoren.1 Twee gekoppelde oscillatoren zonder aandrijving We beschouwen als voorbeeld van een systeem van puntmassa s die gekoppeld zijn aan elkaar en aan twee vaste wanden
Hoofdstuk Twee gekoppelde oscillatoren.1 Twee gekoppelde oscillatoren zonder aandrijving We beschouwen als voorbeeld van een systeem van puntmassa s die gekoppeld zijn aan elkaar en aan twee vaste wanden
3 Bijzondere functies
 3 Bijzondere functies Verkennen grafieken Bijzondere functies Inleiding Verkennen Probeer de drie vragen te beantwoorden. Uitleg grafieken Bijzondere functies Uitleg Opgave 1 Bekijk de eerste pagina van
3 Bijzondere functies Verkennen grafieken Bijzondere functies Inleiding Verkennen Probeer de drie vragen te beantwoorden. Uitleg grafieken Bijzondere functies Uitleg Opgave 1 Bekijk de eerste pagina van
1. Opgave. We gebruiken de bilineaire transformatie om een digitaal laagdoorlaatfilter H(z) te ontwerpen met de volgende parameters:
 te ontwerpen met de volgende parameters:") ees Signals and Systems Oefeningen analoog/digitaal filterontwerp. Opgave We gebruiken de bilineaire transformatie om een digitaal laagdoorlaatfilter H(z) te ontwerpen met de volgende parameters: Doorlaatband:
ees Signals and Systems Oefeningen analoog/digitaal filterontwerp. Opgave We gebruiken de bilineaire transformatie om een digitaal laagdoorlaatfilter H(z) te ontwerpen met de volgende parameters: Doorlaatband:
Case Simulink EE4- Building a SSV - Team PM1 21 maart 2014
 Case Simulink EE4- Building a SSV - Team PM1 21 maart 2014 Inhoudsopgave Inhoudsopgave... 1 Figurenlijst... 1 Inleiding... 2 Gedrag van het zonnepaneel gekoppeld aan een weerstand... 2 Gedrag van de DC-motor
Case Simulink EE4- Building a SSV - Team PM1 21 maart 2014 Inhoudsopgave Inhoudsopgave... 1 Figurenlijst... 1 Inleiding... 2 Gedrag van het zonnepaneel gekoppeld aan een weerstand... 2 Gedrag van de DC-motor
HOOFDSTUK 3: Netwerkanalyse
 HOOFDSTUK 3: Netwerkanalyse 1. Netwerkanalyse situering analyseren van het netwerk = achterhalen van werking, gegeven de opbouw 2 methoden manuele methode = reductie tot Thévenin- of Norton-circuit zeer
HOOFDSTUK 3: Netwerkanalyse 1. Netwerkanalyse situering analyseren van het netwerk = achterhalen van werking, gegeven de opbouw 2 methoden manuele methode = reductie tot Thévenin- of Norton-circuit zeer
Circuits and Signal Processing ET2405-d2
 Circuits and Signal Processing ET2405-d2 3 e college Arie van Staveren en Wouter A. Serdijn ET2045-d2 / 3 e college 1 Leerdoelen Na afloop van dit college kan je: oorzaken aangeven van variaties in elementwaarden;
Circuits and Signal Processing ET2405-d2 3 e college Arie van Staveren en Wouter A. Serdijn ET2045-d2 / 3 e college 1 Leerdoelen Na afloop van dit college kan je: oorzaken aangeven van variaties in elementwaarden;
Figuur 1: Laag-doorlaat. /j Res +1. b) Veronderstel de tijdsconstante van 2 seconden. Ret inputsignaal U1 (t), in Volt, is de functie:
 Veronderstel de tijdsconstante van 2 seconden. Ret inputsignaal U1 (t), in Volt, is de functie:") 1. Gegeven is het volgende laagdoorlaat filter Figuur 1: Laagdoorlaat filter. beschreven met de differentiaal vergelijking: met de capaciteit C = 1. 104 F en een nog te bepalen weerstand R. a) Geef de
1. Gegeven is het volgende laagdoorlaat filter Figuur 1: Laagdoorlaat filter. beschreven met de differentiaal vergelijking: met de capaciteit C = 1. 104 F en een nog te bepalen weerstand R. a) Geef de
Oefeningen Elektriciteit II Deel II
 Oefeningen Elektriciteit II Deel II Dit document bevat opgaven die aansluiten bij de cursustekst Elektriciteit II deel II uit het jaarprogramma van het e bachelorjaar industriële wetenschappen KaHo Sint-ieven.
Oefeningen Elektriciteit II Deel II Dit document bevat opgaven die aansluiten bij de cursustekst Elektriciteit II deel II uit het jaarprogramma van het e bachelorjaar industriële wetenschappen KaHo Sint-ieven.
Asymptoten. Hoofdstuk Basis. 1.2 Verdieping. 1. Bepaal alle asymptoten van de volgende functies:
 Hoofdstuk 1 Asymptoten 1.1 Basis 1. Bepaal alle asymptoten van de volgende functies: a) f) 5 + 6 5 + 1 b) f) + 5 c) f) 5 + d) f) + + e) f) + + f) f) + 1 + + 4 g) f) 5 + h) f) + 1 i) f) cos 1 1. Verdieping
Hoofdstuk 1 Asymptoten 1.1 Basis 1. Bepaal alle asymptoten van de volgende functies: a) f) 5 + 6 5 + 1 b) f) + 5 c) f) 5 + d) f) + + e) f) + + f) f) + 1 + + 4 g) f) 5 + h) f) + 1 i) f) cos 1 1. Verdieping
Trillingen & Golven. Practicum 1 Resonantie. Door: Sam van Leuven 5756561 Jiri Oen 5814685 Februari 2008-02-24
 Trillingen & Golven Practicum 1 Resonantie Door: Sam van Leuven 5756561 Jiri Oen 5814685 Februari 2008-02-24 In dit verslag wordt gesproken over resonantie van een gedwongen trilling binnen een LRC-kring
Trillingen & Golven Practicum 1 Resonantie Door: Sam van Leuven 5756561 Jiri Oen 5814685 Februari 2008-02-24 In dit verslag wordt gesproken over resonantie van een gedwongen trilling binnen een LRC-kring
Hoofdstuk 5 Voorbeelden - Toepassingen
 Hoofdstuk 5 Voorbeelden Toepassingen 5. Inleiding Dit hoofdstuk geeft enkele toepassingen op de tot nog toe geziene leerstof. In paragrafen 5. en 5.3 komen twee regelkringen aan bod waarvoor de transfertfuncties
Hoofdstuk 5 Voorbeelden Toepassingen 5. Inleiding Dit hoofdstuk geeft enkele toepassingen op de tot nog toe geziene leerstof. In paragrafen 5. en 5.3 komen twee regelkringen aan bod waarvoor de transfertfuncties
REG4. Inleiding tot regeltechniek
 Katholieke Hogeschool Limburg Departement Industriële Wetenschappen en Technologie REG4 Inleiding tot regeltechniek dr ir Johan Baeten Cursus gedoceerd aan 3e jaar Academische Bachelor Chemie / Biochemie
Katholieke Hogeschool Limburg Departement Industriële Wetenschappen en Technologie REG4 Inleiding tot regeltechniek dr ir Johan Baeten Cursus gedoceerd aan 3e jaar Academische Bachelor Chemie / Biochemie
Procescontrole en -sturing van een Waterzuiveringsstation
 Procescontrole en -sturing van een Waterzuiveringsstation (met bijzondere aandacht voor respirometrie) Peter A. Vanrolleghem BIOMATH Universiteit Gent Procescontrole en -sturing van een WZI (met bijzondere
Procescontrole en -sturing van een Waterzuiveringsstation (met bijzondere aandacht voor respirometrie) Peter A. Vanrolleghem BIOMATH Universiteit Gent Procescontrole en -sturing van een WZI (met bijzondere
1. Langere vraag over de theorie
 1. Langere vraag over de theorie Maak gebruik van de methode van de fasoren (teken ook het betreffende diagramma) om het verband tussen stroom en spanning te bepalen in een LC-kring die aangedreven wordt
1. Langere vraag over de theorie Maak gebruik van de methode van de fasoren (teken ook het betreffende diagramma) om het verband tussen stroom en spanning te bepalen in een LC-kring die aangedreven wordt
Voor de zend / luister amateur. Het berekenen van weerstand verzwakkers.
 PA0FWN. Voor de zend / luister amateur. Het berekenen van weerstand verzwakkers. Regelmatig krijgen we in b.v. Electron en andere publicaties te maken met zaken als Hf (vermogens) verzwakkers. Tussen een
PA0FWN. Voor de zend / luister amateur. Het berekenen van weerstand verzwakkers. Regelmatig krijgen we in b.v. Electron en andere publicaties te maken met zaken als Hf (vermogens) verzwakkers. Tussen een
****** Deel theorie. Opgave 1
 HIR - Theor **** IN DRUKLETTERS: NAAM.... VOORNAAM... Opleidingsfase en OPLEIDING... ****** EXAMEN CONCEPTUELE NATUURKUNDE MET TECHNISCHE TOEPASSINGEN Deel theorie Algemene instructies: Naam vooraf rechtsbovenaan
HIR - Theor **** IN DRUKLETTERS: NAAM.... VOORNAAM... Opleidingsfase en OPLEIDING... ****** EXAMEN CONCEPTUELE NATUURKUNDE MET TECHNISCHE TOEPASSINGEN Deel theorie Algemene instructies: Naam vooraf rechtsbovenaan
Uitwerkingen van het Tentamen Moleculaire Simulaties - 8C Januari uur
 Uitwerkingen van het Tentamen Moleculaire Simulaties - 8C030 25 Januari 2007-4.00-7.00 uur Vier algemene opmerkingen: Het tentamen bestaat uit 6 opgaven verdeeld over 3 pagina s. Op pagina 3 staat voor
Uitwerkingen van het Tentamen Moleculaire Simulaties - 8C030 25 Januari 2007-4.00-7.00 uur Vier algemene opmerkingen: Het tentamen bestaat uit 6 opgaven verdeeld over 3 pagina s. Op pagina 3 staat voor
EXAMENONDERDEEL ELEKTRONISCHE INSTRUMENTATIE (5GG80) gehouden op woensdag 27 juni 2007, van tot uur.
 gehouden op woensdag 27 juni 2007, van tot uur.") Technische Universiteit Eindhoven Faculteit Elektrotechniek EXAMENONDERDEEL ELEKTRONISCHE INSTRUMENTATIE (5GG80) gehouden op woensdag 27 juni 2007, van 14.00 tot 17.00 uur. Opgave 1 Het gebruik van het
Technische Universiteit Eindhoven Faculteit Elektrotechniek EXAMENONDERDEEL ELEKTRONISCHE INSTRUMENTATIE (5GG80) gehouden op woensdag 27 juni 2007, van 14.00 tot 17.00 uur. Opgave 1 Het gebruik van het
Inhoud. Inleiding 2. Materiaal & Methode 3. Resultaten 5. Theoretisch Kader 6. Discussie 7. Bronnen 9. Appendix Onderzoeksvraag 2
 Bifilaire slinger De invloed van de slingerlengte, de lengte van en afstand tussen de draden op de trillingstijd van een bifilaire slinger. Kiki de Boer, Sitti Romijn, Thomas Markhorst & Lucas Cohen Calandlyceum
Bifilaire slinger De invloed van de slingerlengte, de lengte van en afstand tussen de draden op de trillingstijd van een bifilaire slinger. Kiki de Boer, Sitti Romijn, Thomas Markhorst & Lucas Cohen Calandlyceum
Uitwerking Tentamen Klassieke Mechanica I Dinsdag 10 juni 2003
 Uitwerking Tentamen Klassieke Mechanica I Dinsdag juni 3 OPGAE : de horizontale slinger θ T = mg cosθ mg m mg tanθ mg a) Op de massa werken twee krachten, namelijk de zwaartekracht, ter grootte mg, en
Uitwerking Tentamen Klassieke Mechanica I Dinsdag juni 3 OPGAE : de horizontale slinger θ T = mg cosθ mg m mg tanθ mg a) Op de massa werken twee krachten, namelijk de zwaartekracht, ter grootte mg, en
1 VRIJE TRILLINGEN 1.0 INLEIDING 1.1 HARMONISCHE OSCILLATOREN. 1.1.1 het massa-veersysteem. Hoofdstuk 1 - Vrije trillingen
 1 VRIJE TRILLINGEN 1.0 INLEIDING Veel fysische systemen, van groot tot klein, mechanisch en elektrisch, kunnen trillingen uitvoeren. Daarom is in de natuurkunde het bestuderen van trillingen van groot
1 VRIJE TRILLINGEN 1.0 INLEIDING Veel fysische systemen, van groot tot klein, mechanisch en elektrisch, kunnen trillingen uitvoeren. Daarom is in de natuurkunde het bestuderen van trillingen van groot
Methodes voor debietsafstelling
 OPTIVENT Achtergrondbijlage 10 Methodes voor debietsafstelling Samuel Caillou Xavier Kuborn Paul Van den Bossche Afdeling Klimaat, Installaties en Energieprestatie (CLIE) Onderzoeksgroepen ventilatie en
OPTIVENT Achtergrondbijlage 10 Methodes voor debietsafstelling Samuel Caillou Xavier Kuborn Paul Van den Bossche Afdeling Klimaat, Installaties en Energieprestatie (CLIE) Onderzoeksgroepen ventilatie en
KWADRATISCHE VERGELIJKINGEN, HET GULDEN ZADELVLAK, EN DE REGELMATIGE VIJFHOEK.
 KWADRATISCHE VERGELIJKINGEN, HET, EN DE REGELMATIGE. VIÈTE Johan A.C. Kolk Mathematisch Instituut, Universiteit Utrecht Met medewerking van Rogier Bos Christelijk Gymnasium Utrecht & Freudenthal Instituut,
KWADRATISCHE VERGELIJKINGEN, HET, EN DE REGELMATIGE. VIÈTE Johan A.C. Kolk Mathematisch Instituut, Universiteit Utrecht Met medewerking van Rogier Bos Christelijk Gymnasium Utrecht & Freudenthal Instituut,
Eindexamen vwo natuurkunde I
 Opgave Lichtpracticum maximumscore De buis is aan beide kanten afgesloten om licht van buitenaf te voorkomen. De buis is van binnen zwart gemaakt om reflecties van het licht in de buis te voorkomen. inzicht
Opgave Lichtpracticum maximumscore De buis is aan beide kanten afgesloten om licht van buitenaf te voorkomen. De buis is van binnen zwart gemaakt om reflecties van het licht in de buis te voorkomen. inzicht
Rekenmachine met grafische display voor functies
 Te gebruiken rekenmachine Duur Rekenmachine met grafische display voor functies 100 minuten 1/5 Opgave 1. Een personenauto rijdt met een beginsnelheid v 0=30 m/s en komt terecht op een stuk weg waar olie
Te gebruiken rekenmachine Duur Rekenmachine met grafische display voor functies 100 minuten 1/5 Opgave 1. Een personenauto rijdt met een beginsnelheid v 0=30 m/s en komt terecht op een stuk weg waar olie
Onderzoek werking T-verter.
 Onderzoek werking T-verter. De Beer Gino Page 1 02/10/2007 Inhoudstabel: 1. Doelstellingen. 2. Benodigd materiaal. 3. Bespreking van de frequentieregelaar. 4. Instellingen en gebruik van de frequentieregelaar.
Onderzoek werking T-verter. De Beer Gino Page 1 02/10/2007 Inhoudstabel: 1. Doelstellingen. 2. Benodigd materiaal. 3. Bespreking van de frequentieregelaar. 4. Instellingen en gebruik van de frequentieregelaar.
Notebook-tentamen Systeem- en Regeltechniek 1 (113115)
") Systeem- en regeltechniek 1 (113115) 1/5 Vooraf Notebook-tentamen Systeem- en Regeltechniek 1 (113115) Oorspronkelijke datum: 29 juni 2009 13:30 17:00 uur Aangepast voor notebook: juni 2010 In onderstaande
Systeem- en regeltechniek 1 (113115) 1/5 Vooraf Notebook-tentamen Systeem- en Regeltechniek 1 (113115) Oorspronkelijke datum: 29 juni 2009 13:30 17:00 uur Aangepast voor notebook: juni 2010 In onderstaande
Academiejaar Eerste Examenperiode Opleidingsonderdeel: Elektrische Schakelingen en Netwerken. EXAMENFOLDER maandag 27 januari 2014
 Universiteit Gent naam: Faculteit Ingenieurswetenschappen en Architectuur voornaam: de Bachelor Ingenieurswetenschappen richting: Opties C,, TN en W prof. Kristiaan Neyts Academiejaar 03-04 erste xamenperiode
Universiteit Gent naam: Faculteit Ingenieurswetenschappen en Architectuur voornaam: de Bachelor Ingenieurswetenschappen richting: Opties C,, TN en W prof. Kristiaan Neyts Academiejaar 03-04 erste xamenperiode
TENTAMEN Versterkerschakelingen en Instrumentatie (EE1C31)
") TECHNISCHE UNIVERSITEIT DELFT Faculteit Elektrotechniek, Wiskunde en Informatica TENTAMEN Versterkerschakelingen en Instrumentatie (EE1C31) 23 juli 2015, 9.00-12.00 uur Dit tentamen bestaat uit twee opgaven
TECHNISCHE UNIVERSITEIT DELFT Faculteit Elektrotechniek, Wiskunde en Informatica TENTAMEN Versterkerschakelingen en Instrumentatie (EE1C31) 23 juli 2015, 9.00-12.00 uur Dit tentamen bestaat uit twee opgaven