Masterproef: Intelligent stappenmotor algoritme op basis van de tegen-emk
|
|
|
- Cornelis Sasbrink
- 7 jaren geleden
- Aantal bezoeken:
Transcriptie
1 Masterproef: Intelligent stappenmotor algoritme op basis van de tegen-emk Studiegebied Industriële wetenschappen en technologie Opleiding Master in de industriële wetenschappen: elektrotechniek Afstudeerrichting Automatisering Academiejaar Lennart Carlier Academische bachelor- en masteropleidingen, Graaf Karel de Goedelaan 5, 8500 Kortrijk
2 "Wat wij weten is een druppel, wat wij niet weten een oceaan." Isaac Newton Voorwoord Een masterproef is het orgelpunt van een academische opleiding. Als student bewijs je je kunnen. Het was voor mij dan ook een uitdaging om een jaar lang in een onderzoek en ontwikkelafdeling mee te mogen werken aan een innovatief project. Het was aangenaam toeven tussen ingenieurs micro-elektronica, doctors in de fysica en specialisten in embedded software. Zo aangenaam dat ik mijn professionele carrière graag zou willen beginnen in een R&D groep waar onderzoek en innovatie alle kansen krijgen. Toch was het niet altijd gemakkelijk. Onderzoek betekent een duik in het onbekende en het project werd niet gespaard van complexe problemen. Maar door vol te houden, hard te werken en met een open geest te blijven zoeken is geen enkel probleem onoverkomelijk. Meestal was de oplossing triviaal, soms innoverend. Ik ben dan ook trots dat sommige van mijn resultaten worden gepubliceerd in een wetenschappelijk artikel dat op de ECCE 2011 conferentie in Phoenix, Arizona, USA wordt gepresenteerd. Dit alles was niet mogelijk geweest zonder de steun van mijn externe en interne promotor. Mijn dank gaat dan ook uit naar Peter Cox en Stijn Derammelaere die mij met raad en daad hebben bijgestaan, mijn werk kritisch hebben becommentarieerd en hebben geholpen met het op papier zetten van de behaalde resultaten. Ook alle ingenieurs van ON semiconductor die mij de nodig informatie hebben bezorgd wil ik heel graag bedanken. Zonder alle mensen die binnen ON semiconductor ervoor gezorgd hebben dat dit project voldoende financiële steun kreeg, zou ik deze thesis nooit geschreven kunnen hebben. Speciale dank gaat uit naar mijn ouders die er voor zorgden dat ik een auto ter beschikking had om toch in een menselijke tijdspanne mijn stageplaats te bereiken. Ten slotte wil ik ook mijn vriendin bedanken voor de steun en de tijd die ook zij in deze masterproef heeft gestopt doorheen het hele jaar. Lennart Carlier Kortrijk, juni 2011 II
3 Inhoudsopgave Voorwoord... II Inhoudsopgave... III Abstract... VI Figurenlijst... VII Tabellenlijst... IX 1. Inleiding Situering Het bedrijf Doelstellingen Karakterisatie stappenmotor en analyse van de tegen-emk Intelligent stappenmotor algoritme ontwikkelen Toepassing in microcontroller De stappenmotor Principiële werking Motorkarakteristieken De koppel hoek karakteristiek De pull-in koppel karakteristiek De pull-out koppel karakteristiek De verschillende stapmodes Volledige stapmode Half stapmode Micro stapmode Uitvoeringsvormen De permanent magneet stappenmotor De variabele reluctantie stappenmotor De hybride stappenmotor Het mathematische model Elektrische dynamiek Mechanisch model Tegen EMK en positie terugkoppeling Opmeten basis karakteristieken van de stappenmotor Koppel-hoek karakteristiek De meetprocedure III
4 De meetresultaten Conclusies De Pull in koppel karakteristiek De meetprocedure De meetresultaten Conclusies De pull out koppel karakteristiek De meetprocedure De meetresultaten Conclusies Stapresponsie De meetprocedure De meetresultaten Conclusies Acceleratie De meetprocedure De meetresultaten Conclusies Karakterisatie en analyse van de tegen-emk Theoretische achtergrond tegen-emk Het begrip tegen-emk Het opmeten van tegen-emk Karakterisatie van de tegen-emk De tegen-emk bij de pull-out koppel karakteristiek De tegen-emk bij de stapresponsie De tegen-emk bij acceleratie De tegen-emk bij Stall Analyse van de tegen-emk Verklaring fenomenen in de tegen-emk Oplossing voor de fenomenen en het resultaat Verdere mogelijkheden van de tegen-emk Stall detectie algoritme Het concept van het stall detectie algoritme Nabewerking tegen-emk Werkingsgebied stall detectie algoritme + werkelijke snelheid IV
5 De absolute threshold De delta threshold De motorcontroller bij stall Werkelijke toepassing voor het stall detectie algoritme Omvorming naar code voor microcontroller Het concept voor een auto-acceleratie algoritme Bepalen van de mechanische eigenschappen uit de tegen-emk Formule voor de stapresponsie van de tegen-emk Berekenen van de mechanische eigenschappen uit de stapresponsie Het concept Besluit Realisatie Valorisatie Toekomstperspectieven Literatuurlijst... VI Bijlagen... VII De meetopstelling... VII Hardware... VIII Software... XII Simulink model in dspace... XIII Het algemeen model... XIII Positie informatie... XV NEXT puls generator... XVII Tegen-EMK nabewerking... XIX Het stall detectie algoritme... XXI De stall detectie interface... XXIII Beveiliging stappenmotor... XXIV Mechanische parameters uit stapresponsie... XXIX European patent application: EP A1... XXXII Datasheet KH39 series: 2-fase hybrid stepping motor:... XLV V
6 Abstract Simplified, the stepper motor can be considered as an electrical machine that is easily able to drive a mechanical system step by step by its design. The stepsize of the motor is exactly known in advance and this without the need of a position feedback. Since no encoder is required, the stepper motor is a low cost solution for a positioning system. However, in some positioning applications it is crucial that a certain position is 100% surely reached. It is inherent to the open loop nature of the traditional way to control the stepper motor, that there is no feedback from the actual movement of the underlying mechanical system. If the mechanical system is an excessive load, or worse is completely stalled, it makes no sense to continue driving the stepper motor. This would only result in step loss and the actual mechanical position is no longer synchronized with the theoretical position. ON Semiconductor is an international publicly traded company that offers high-quality silicon solutions for energy efficient electronics. ON Semiconductor is a partner in the project ISMA (Intelligent Stepper Motor Algorithms). This project researches and develops innovative algorithms for the control of stepper motors. One of the possibilities of this algorithm is the use of the back EMF of the stepper motor. The back EMF signal contains useful information on the rotor position. This information can be used to monitor the motor condition and to implement a closed loop position control algorithm. ON Semiconductor has already a patented sampling method to measure the back EMF signal. This thesis is intended to characterize and analyze this back-emf. Then, a stall detection algorithm is developed with this back-emf. As proof of concept this algorithm is applied in a microcontroller which is implemented in a demo setup. VI
7 Figurenlijst Figuur 1: Logo ON semiconductor... 2 Figuur 2: Locatie ON semiconductor in Oudenaarde... 2 Figuur 3: Aanpak karakterisatie en analyse tegen-emk... 3 Figuur 4: Ideaal verloop van de koppel - hoek karakteristiek... 4 Figuur 5: Verloop van de 'pull-in' en 'pull-out' koppel karakteristiek... 4 Figuur 6: Verloop van de hoekpositie bij de stapresponsie... 4 Figuur 7: Verloop van de werkelijk snelheid t. o. v. de gewenste snelheid Figuur 8: Visualisatie van een 'stall'... 5 Figuur 9: Ontwikkelproces voor het 'stall' detectie algoritme... 6 Figuur 10: Aanpak voor het komen tot een demo-opstelling... 7 Figuur 11: Onbekrachtigde permanentemagneet stappenmotor... 8 Figuur 12: Het doorlopen van één elektrische omwenteling bij de stappenmotor... 8 Figuur 13: De koppelhoek karakteristiek... 9 Figuur 14: Acceleratie koppel bij de één stap Figuur 15: Verloop van het 'pull-in' en invloed van de inertie Figuur 16: Verloop van het 'pull-out' koppel en de invloed van de viskeuze demping Figuur 17: Invloed van de snelheid op de belasting van de stappenmotor Figuur 18: Volledige stapmode Figuur 19: Half stapmode Figuur 20: Een achtste micro stapmode Figuur 21: Een permanente magneet stappenmotor (conceptueel) Figuur 22: Variabele reluctantie stappenmotor (Conceptueel) Figuur 23: De hybride stappenmotor (conceptueel) Figuur 24: Het mathematische model Figuur 25: Meetpunten van de koppel-hoek meetprocedure Figuur 26: De meetprocedure voor de koppel-hoek karakteristiek Figuur 27:Situatie bij te hoog tegenkoppel Figuur 28: Meetresultaten koppel-hoek karakteristiek Figuur 29: Theoretische vorm versus opgemeten vorm van de koppel-hoek karakteristiek Figuur 30: Het meten van 1 punt op de 'pull-in' of 'pull-out' karakteristiek Figuur 31: De meetprocedure voor het opmeten van de 'pull-in' karakteristiek Figuur 32: Gemiddeld beschikbaar koppel bij 1/2 en 1/4 micro stapmode Figuur 33: Meetresultaten 'pull-in' karakteristiek bij verschillende stapmodi Figuur 34: Simulatie resultaten van het 'pull-in' koppel uit het mathematische model van de stappenmotor Figuur 35: Schematische voorstelling van de 'pull-out' koppel meetprocedure Figuur 36: Inwerkend acceleratie koppel op de stappenmotor voor 1/2 en 1/4 micro stapmode Figuur 37: Meetresultaten van de 'pull-out' koppel karakteristiek voor verschillende stapmodi Figuur 38: De 'load angle' of de belastingshoek in functie van de stapfrequentie en het aangelegde lastkoppel 28 Figuur 39: Simulatie versus meting van de 'pull-out' koppel karakteristiek Figuur 40: Schematische voorstelling van de meetprocedure voor de stapresponsie Figuur 41: Stapresponsie bij zeer lage stapfrequenties Figuur 42: Het koppel op de rotor bij de stapresponsie Figuur 43: Stapresponsie bij een stapfrequentie gelijk aan de eigenfrequentie Figuur 44: Stapresponsie bij een hoge stapfrequentie Figuur 45: Schematische voorstelling meetprocedure voor acceleratie VII
8 Figuur 46: Resultaat van een meting met het S-vormig snelheidsprofiel Figuur 47: Resultaat van een meting met het lineair snelheidsprofiel Figuur 48: Werkelijke positie van de rotor tijdens acceleratie Figuur 49: Mogelijke positie van de rotor tijdens acceleratie Figuur 50: Werkelijke, aangelegde en gewenste frequentie na directe acceleratie Figuur 51: 'Load angle' of belastingshoek na directe acceleratie Figuur 52: Verband tussen de opgewekte tegen-emk, stroomvector i s, het rotorveld Φ m en de belastingshoek δ Figuur 53: Equivalent schema van een spoel Figuur 54: Meetpunten van de tegen-emk Figuur 55: Transiënt gedrag van de tegen-emk Figuur 56: De tegen-emk (BEMF) in functie van de belasting en de stapfrequentie Figuur 57: De tegen-emk bij belasting Figuur 58: Berekende tegen-emk in functie de belasting en de stapfrequentie Figuur 59: Ruwe tegen-emk van de stapresponsie Figuur 60: Gefilterde tegen-emk van de stapresponsie Figuur 61: De 4 tegen-emk op de elektrische cirkel Figuur 62: Meting in transparante mode met de 4 tegen-emk's Figuur 63: Tegen-EMK patroon tijdens het stappen Figuur 64: De werkelijke en theoretische snelheid van de stappenmotor Figuur 65: De tegen-emk tijdens S-vormig snelheidsprofiel Figuur 66: De tegen-emk bij snelle acceleratie Figuur 67: Schematische voorstelling van de 'stall' meetprocedure Figuur 68: De werkelijke -, theoretische positie en de tegen-emk bij een stall in functie van tijd Figuur 69: De tegen-emk in functie van de stapfrequentie Figuur 70: De tegen-emk in transparante mode tijdens het eerste fenomeen Figuur 71: De tegen-emk in transparante mode tijdens het tweede fenomeen Figuur 72: De tegen-emk in transparante mode buiten de discontinuïteiten Figuur 73: De gemiddelde van de tegen-emk in transparante mode Figuur 74: Resultaat optimalisatie tegen-emk bij frequentie sweep Figuur 75: Resultaat optimalisatie tegen-emk bij acceleratie Figuur 76: Resultaat optimalisatie tegen-emk bij meting 'pull-out' Figuur 77: Overzicht schema van het 'stall' detectie algoritme Figuur 78: Optimalisatie van de tegen-emk door uitmiddeling tijdens nuldoorgang Figuur 79: Het patroon van de verschillende tegen-emk offsets Figuur 80: De 4 verschillende tegen-emk's Figuur 81: Werkings gebied stall detectie algoritme Figuur 82: De absolute threshold Figuur 83: De delta threshold van de tegen-emk Figuur 84: Terugstappen van de motor bij 'stall' detectie Figuur 85: De mengklep met stappenmotor Figuur 86: Detail beeld klep Figuur 87: De tegen-emk bij de aansturing van de klep tot tegen zijn mechanische grens met 'stall' detectie enabled Figuur 88: De tegen-emk bij de aansturing van de klep tot tegen zijn mechanische grens met 'stall' detectie disabled Figuur 89: Het koppel bij de stapresponsie Figuur 90: Equivalent verloop voor het koppel van de stappenmotor Figuur 91: Verloop tegen-emk tijdens de stapresponsie Figuur 92: De meetpunten bij de tegen-emk VIII
9 Figuur 93: De spanningsafname U 1 /U 2 bij de meting voor de mechanische parameters Figuur 94: De periode t 2 - t 1 bij de meting voor de mechanische parameters Figuur 95: Linearisatie bij de werkelijke koppel-hoek karakteristiek Figuur 96: Principe voor het koppel bij het accelereren van de motor Tabellenlijst Tabel 1: Invloed van de parameters stapmode en acceleratie op oscillerend gedrag bij het S-vormig en het lineair snelheidsprofiel IX
10 1. Inleiding 1.1. Situering Deze masterproef kadert in het ISMA (Intelligent Stepper Motor Algorithms) project. In deze samenwerking tussen ON Semiconductor en PsiControl Mechatronics als industriële partners en HOWEST en UGent als academische partners, worden innovatieve algoritmes voor de controle van stappenmotoren onderzocht en ontwikkelt. De stappenmotor kan vereenvoudigd worden voorgesteld als een elektrische motor die door zijn bouwvorm en aansturing gemakkelijk stapsgewijs een mechanisch systeem aandrijft. De stapgrootte is op voorhand bepaald waardoor er voor de aansturing geen positieterugkoppeling nodig is. Het ontbreken van een positie-encoder maakt de stappenmotor een goedkope oplossing voor positioneringsystemen. Traditioneel wordt een stappenmotor in open loop aangestuurd. Het grote nadeel hiervan is dat de aansturing geen weet heeft van het achterliggend mechanisch systeem. Stel dat het aan te drijven systeem de motor overbelast, of erger nog volledig blokkeert. Het verder aansturen van de motor heeft dan geen zin omdat dit alleen maar leidt tot het verliezen van stappen. Zo verliest het systeem de synchronisatie tussen de veronderstelde en de werkelijke positie. In sommige kritische toepassingen is het van cruciaal belang dat de veronderstelde positie met 100% zekerheid bereikt wordt. In dergelijke applicaties wordt als bijkomende veiligheid toch een positie sensor gebruikt. De bedoeling van het ISMA project is ondermeer om na te gaan of de opgewekte tegen-emk in de stappenmotor kan gebruikt worden om snelheid- en positie-informatie af te leiden. Op die manier kan zonder bijkomende sensor toch een 100% garantie gegeven worden dat de verwachte eindpositie is bereikt. In het kort is de tegen-emk een spanning opgewekt in een motor ten gevolge van een roterend magnetisch veld. Een methode om de tegen-emk in de stappenmotor op te meten is gepatenteerd door ON semiconductor. Een eerste opdracht in deze masterproef is het karakteriseren van de opgewekte tegen-emk. Het is in een latere fase de bedoeling om met deze informatie een positieterugkoppeling naar de aansturing te ontwikkelen. Hierdoor kan de werkelijke positie vergeleken worden met de veronderstelde. Is deze verschillend dan kan dit gemeld worden aan het hoger liggende systeem die actie onderneemt. Een verdere verfijning is de aansturing zo te maken dat het verliezen van de positie voorkomen wordt. De masterproef bouwt verder op door ON Semiconductor eerder ontwikkelde meetsystemen en verrichte karakterisatie van de tegen-emk. Het is de bedoeling om te komen tot een intelligent stappenmotor algoritme toegepast in een demo-opstelling met een microprocessor. 1



11 1.2. Het bedrijf ON Semiconductor is een internationaal bedrijf dat hoogwaardige silicium oplossingen biedt voor energie efficiënte elektronica. Het bedrijf heeft oplossingen voor tal van problemen die zich situeren in de automobiel, communicatie, computer, consumenten, industriële, LED verlichting, medische, militair/luchtvaart en vermogen applicaties. ON Semiconductor heeft een wereldwijde bevoorradingsketen en een netwerk van productie faciliteiten, verkoopkantoren en ontwikkelingscentra in de belangrijke markten van Noord-Amerika, Europa en de Aziatische regio s. De hoofdzetel is gelegen in Phoenix (VS) te Arizona. Naast de wereldwijde aanwezigheid en de kennis in verschillende Figuur 1: Logo ON semiconductor industriële sectoren staat ON semiconductor garant voor kwalitatieve producten en goede service na verkoop. ON semiconductor houdt er zich aan om producten te leveren aan hun klanten die volledig in overeenstemming zijn met de milieu wetgevingen. Ook is het bedrijf toegewijd om een gezonde werkomgeving te creëren voor zijn werknemers en de toekomstige generaties. Het filiaal in Oudenaarde heeft zowel een productie- als een ontwikkelafdeling (Figuur 2). Deze masterproef situeert zich in de ontwikkelafdeling voor applicaties. Het is de bedoeling om gebruik te maken van een bestaande stappenmotor driver die is ontwikkeld in ON semiconductor. Deze stappenmotor driver bezit de functie om de tegen-emk van de stappenmotor te gaan meten. Figuur 2: Locatie ON semiconductor in Oudenaarde 2
12 1.3. Doelstellingen Het doel van deze masterproef bestaat uit drie delen. In het eerste deel is het de bedoeling om de stappenmotor en de tegen-emk te karakteriseren. Daaruit voortvloeiend wordt een analyse van de tegen-emk uitgevoerd. In het tweede deel wordt de tegen-emk toegepast in een intelligent stappenmotor algoritme. Hierbij vormt de informatie verzameld in het eerste deel een stevige basis. In het derde en laatste onderdeel van deze masterproef wordt dit intelligent algoritme geprogrammeerd in een microcontroller die een kleine demo-opstelling aanstuurt Karakterisatie stappenmotor en analyse van de tegen-emk In het ISMA project werd een theoretisch model voor de stappenmotor opgesteld. Dit model wordt gebruikt om het gedrag van de stappenmotor te gaan voorspellen maar werd nog niet specifiek getest naar het gedrag van de tegen-emk. Daarom is het de bedoeling om met dit model nog enkele simulaties te doen om het gedrag van de tegen-emk beter te begrijpen. Gelijklopend met het testen van het theoretische model van de stappenmotor worden ook werkelijke metingen op een stappenmotor uitgevoerd. In ON semiconductor werd reeds een basis opgebouwd voor deze meetprocedures. Deze meetprocedures worden voor het karakteriseren van de stappenmotor verder uitgewerkt en geoptimaliseerd. Uiteindelijk worden de meetprocedures toegepast en wordt de meetdata geanalyseerd. Als de simulaties van het mathematische model en de metingen op de werkelijke opstelling afgelopen zijn worden beide resultaten met elkaar vergeleken. Daarbij worden eventueel de oorzaken van de verschillen tussen de twee onderzocht en uitgeklaard. Figuur 3 geeft een grafische voorstelling weer van hoe dit wordt aangepakt. Figuur 3: Aanpak karakterisatie en analyse tegen-emk Het meten van zowel de koppel-hoek karakteristiek, de pull-in koppel karakteristiek, de pull-out koppel karakteristiek, de stapresponsie, het acceleratiegedrag en het gedrag bij stall dragen bij tot een dieper inzicht in de stappenmotor. Bij deze metingen wordt de aandacht vooral gericht naar het gedrag van de tegen-emk. 3
13 De verschillende karakteristieken en metingen worden even kort toegelicht: De koppel-hoek karakteristiek geeft aan wat de hoekverdraaiing is van de rotor bij het aanleggen van een statisch lastkoppel bij een gegeven motorstroom. Het maximum van deze karakteristiek is het houdkoppel van de stappenmotor (Figuur 4). Figuur 4: Ideaal verloop van de koppel - hoek karakteristiek De pull-in koppel karakteristiek geeft het bereik aan van het koppel, waarbij de motor kan starten zonder stappen te verliezen, in functie van de frequentie waarbij de stapcommando s elkaar opvolgen. De pull-out koppel karakteristiek geeft aan tot welke stapfrequentie de stappenmotor nog een bepaald lastkoppel kan overwinnen. Het verschil met de pull-in koppel karakteristiek is dat hier de werkingspunten niet meer vanuit stilstand bereikt moeten worden. Figuur 5 geeft het verloop van het pull-in en het pull-out koppel weer in functie van stapfrequentie. Figuur 5: Verloop van de 'pull-in' en 'pull-out' koppel karakteristiek Bij de stapresponsie wordt één stapcommando aangelegd en gekeken wat het werkelijke positie verloop is van de stappenmotor (Figuur 6). Figuur 6: Verloop van de hoekpositie bij de stapresponsie 4

14 Bij het acceleratiegedrag van de stappenmotor wordt een bepaald snelheidsprofiel aangelegd en hierbij wordt de werkelijke snelheid van de motor bekeken (Figuur 7). Figuur 7: Verloop van de werkelijk snelheid t. o. v. de gewenste snelheid. Bij stall wordt gekeken hoe de stappenmotor zich zal gedragen bij het blokkeren van de rotor. Hier wordt specifiek gekeken naar het gedrag van de tegen-emk. Figuur 8: Visualisatie van een 'stall' Tijdens het opmeten van deze karakteristieken wordt telkens de tegen-emk van de motor gemeten om zo het gedrag van deze spanning beter te begrijpen. Meer uitleg over de verschillende karakteristieken en metingen wordt in de verdere hoofdstukken gegeven. Na het karakteriseren van de stappenmotor door de verschillende metingen wordt een analyse gedaan van de tegen-emk. Deze analyse moet antwoord geven op volgende onderzoeksvragen: Hoe gedraagt de tegen-emk zich bij de eigenfrequentie? Welke fenomenen treden er op en wat zijn eventueel hun oorzaak? Wat gebeurt er met de tegen-emk als de motor extra belast wordt? Hoe zal de tegen-emk zich gedragen bij het accelereren. 5
15 Intelligent stappenmotor algoritme ontwikkelen Dit onderdeel van de masterproef bouwt verder op de analyse die werd gedaan tijdens het eerste deel. Hierbij is het de bedoeling om met de informatie verzameld over de tegen-emk een intelligent stappenmotor algoritme te ontwikkelen. Dit algoritme moet bewijzen dat het mogelijk is om sensorloos, door gebruik te maken van de tegen-emk, een betrouwbare stappenmotor sturing te verkrijgen. Een van de vereisten voor dit algoritme is het detecteren van een stall van de motor. Een stall is het ongewenst blokkeren van de motor door bijvoorbeeld een obstakel of eindeloop die de motor verhindert verder te stappen. Door de informatie die verkregen wordt uit de tegen-emk zou het algoritme moeten kunnen detecteren of de motor al dan niet zijn stap heeft kunnen zetten. In figuur 9 wordt de aanpak weergegeven die moet helpen om deze doelstelling te bereiken. Figuur 9: Ontwikkelproces voor het 'stall' detectie algoritme Er wordt ook onderzocht of het mogelijkheid is het algoritme verder uit te breiden met automatische snelheidscontrole en automatische koppel controle. Dit alles aan de hand van de informatie afkomstig van de tegen-emk van de stappenmotor. Om het algoritme zo gebruiksvriendelijk mogelijk te houden moeten de parameters makkelijk kunnen worden bepaald. Er wordt daarom onderzocht of de parameterbepaling automatisch kan verlopen. Voor dit onderdeel stellen zich volgende onderzoeksvragen: Is stall -detectie wel mogelijk enkel en alleen door het observeren van de tegen-emk? Hoe betrouwbaar is dit stall -detectie algoritme? Is het mogelijk stall tijdig te detecteren zonder dat er stappen verloren gaan? Kunnen de parameters eenvoudig worden bepaald en kan dit automatisch gebeuren? 6
16 Toepassing in microcontroller Het finale doel van deze masterproef is het bekomen van een stall -detectie algoritme toegepast in een microcontroller die de werking ervan kan demonstreren. De hardware voor deze demonstratieopstelling is reeds opgebouwd. Er moet enkel nog een vertaalslag gebeuren van het algoritme naar bruikbare code voor de microcontroller. Figuur 10 geeft de aanpak weer voor het bekomen van deze doelstelling. Figuur 10: Aanpak voor het komen tot een demo-opstelling 7
17 2. De stappenmotor In de inleiding werd de stappenmotor zeer eenvoudig voorgesteld. De werkelijkheid is complexer. Om deze masterproef voldoende te kunnen begrijpen is het belangrijk te weten hoe de stappenmotor precies werkt. Daarom wordt in dit hoofdstuk de principiële werking van de stappenmotor in meer detail besprokrn. We staan ook stil bij de belangrijkste begrippen, bouwvormen en aanstuurmogelijkheden die in latere hoofdstukken nog aanbod gaan komen. Een groot deel van de informatie gegeven in dit hoofdstuk werd gehaald uit cursus materiaal. [1] [2] 2.1. Principiële werking De werking van de stappenmotor wordt verklaard aan de hand van een tweepolige permanentmagneet rotor en twee loodrecht op elkaar staande fase wikkelingen in de stator zoals afgebeeld in figuur 11. In deze figuur worden de twee fasen als A en B aangeduid. Figuur 11: Onbekrachtigde permanentemagneet stappenmotor De rotor van de stappenmotor bevindt zich initieel in een willekeurige toestand en fase A en B zijn onbekrachtigd. Als fase A wordt bekrachtigd door een stroom door de wikkeling te sturen, zal de rotor zich aligneren met de magneetpolen die daardoor ontstaan. Zolang de stroom in fase A vloeit blijft de rotor in dezelfde positie. Wordt fase B bekrachtigd en fase A onbekrachtigd dan zal de rotor zich aligneren met de magneetpolen ontstaan in fase B. De rotor heeft nu een hoek doorlopen van 90. Dit komt overeen met 1 stap. Als fase A en B respectievelijk negatief worden bekrachtigd, dit door een stroom te sturen in tegengestelde zin, zal de rotor een volledige omwenteling uitvoeren. Deze werking wordt afgebeeld in figuur 12. Figuur 12: Het doorlopen van één elektrische omwenteling bij de stappenmotor 8
18 Door de volgorde van de bekrachtigde spoelen te wijzigen kan in tegenovergestelde richting worden gestapt. Een omwenteling van de rotor in een stappenmotor is een reeks discrete stappen. Door de volgorde van stappen, bekrachtigen van de fasen A en B, sneller of trager na elkaar te laten gebeuren kan de snelheid van de rotor worden bepaald. In het voorbeeld dat hier wordt gebruikt is de staphoek 90, dit wil zeggen dat 1 stap overeen komt met het draaien van de rotor over een hoek van 90. In werkelijkheid zal de staphoek veel kleiner zijn, dit kan constructief gerealiseerd worden door de rotor en/of de stator te voorzien van meer polen of de stator te voorzien van meer fasen. De meest gebruikte staphoek is 1,8. Er bestaan verschillende types stappenmotor maar telkens blijft de principiële werking dezelfde. Op de stator zijn telkens fase wikkelingen voorzien en op de rotor bevinden zich vertandingen en/of permanente magneten. Een korte bespreking van de verschillende types stappenmotoren komt later nog aan bod. De staphoek kan ook worden verkleind door een intelligentere sturing voor de stappenmotor te gebruiken. Meer uitleg over de verschillende stapmodes van de stappenmotor volgt nog Motorkarakteristieken De koppel hoek karakteristiek De koppel hoek karakteristiek geeft het koppel weer in functie van de hoek tussen stator- en rotorveld. Tijdens het opmeten van deze karakteristiek worden één of beide fases van de motor bekrachtigd waarna enkel nog het lastkoppel wordt verhoogd. Hoewel deze karakteristiek statisch wordt opgemeten is ze van nut om het dynamisch gedrag van een stappenmotor te verklaren. De karakteristiek bepaalt bij het aanleggen van een statisch lastkoppel wat de hoek zal zijn tussen het statoren het rotorveld. Omgekeerd geldt dat wanneer de hoek gekend is tussen het stator- en rotorveld ook het lastkoppel is gekend (Figuur 13). Figuur 13: De koppelhoek karakteristiek Bij een bekrachtigde fase zal het koppel dat geleverd wordt op de rotor nul zijn als de hoek tussen stator- en rotorveld nul is. Als de rotor belast wordt gaat er een evenwicht ontstaan op de snijpunt tussen dit lastkoppel T load met de koppel hoek karakteristiek. Wordt het lastkoppel groter dan vergroot de hoek tussen stator en rotor. Eens het lastkoppel groter dan het maximaal koppel van de stappenmotor, kan de motor de last niet meer houden en roteert ze in de richting van het lastkoppel. De positie of de stap is verloren. Het stabiele werkgebied van de stappenmotor ligt dus tussen π/2 en +π/2. 9
19 In de praktijk bezit de stappenmotor meerdere polen p. Het werkgebied wordt dan π/2 < pθ < +π/2 of π/p2 < θ < +π/p2. Het verloop van het koppel in functie van de hoek tussen stator- rotorveld en is dus sinusoïdaal. Het maximum van de curve is het houdkoppel van de stappenmotor voor een bepaalde aangelegde stroom. Het houdkoppel wordt bepaald door de aangelegde stroom en de motorconstante van de stappenmotor. T = T max sin pθ met T max = K m I max (2.1) De vorm van de koppel hoek karakteristiek kan afwijken van motor tot motor en is sterk afhankelijk van de constructie. Uit bovenstaande kan ook afgeleid worden dat de positienauwkeurigheid afhankelijk is van het lastkoppel dat inwerkt op de rotor De pull-in koppel karakteristiek De pull-in koppel karakteristiek of ook wel de start - stop karakteristiek van de stappenmotor genoemd geeft aan bij welke stapfrequentie en lastkoppel de stappenmotor kan starten zonder daarbij stappen te verliezen. Deze karakteristiek wordt vooral beïnvloed door de inertie van het mechanisch systeem (rotor stappenmotor + aangedreven mechanisch systeem). Bij stijgende inertie zal de pull-in koppel karakteristiek naar links opschuiven (zie Figuur 15). Logisch want hoe zwaarder het systeem hoe hoger het versnellingskoppel moet zijn of hoe meer tijd er moet zijn tussen twee opeenvolgende stappen. Met andere woorden bij een zelfde beschikbaar versnellingskoppel zal bij een grotere inertie de hoekversnelling kleiner zijn. Zo zal het langer duren voordat de rotor op snelheid is en zal dus de stapfrequentie bij het starten van de motor lager moeten liggen. Bij verwaarlozen van de viskeuze demping van het systeem is volgende uitdrukking van belang voor het versnellingskoppel: T acc = T em,gem T last = J d²θ dt² (2.2) T em,gem is het gemiddeld koppel tijdens de doorlopen hoek van de rotor. Dit is een gemiddelde van een deel van de rode curve in figuur 14 over die doorlopen hoek. Figuur 14: Acceleratie koppel bij de één stap De gemiddelde hoekversnelling wordt dan: α = T acc J = ω start dt (2.3) Uit deze vergelijkingen volgt dat de hoogste start stapfrequentie zal gevonden worden bij een onbelaste motor. Bij te hoge lastkoppels zal de motor zelfs niet kunnen starten. In deze vergelijkingen werd de viskeuze demping verwaarloosd, de invloed van deze demping op de karakteristiek is ook niet groot. Evenwel zal bij stijgende demping de karakteristiek ook naar links opschuiven. Figuur 15: Verloop van het 'pull-in' en invloed van de inertie 10
20 De pull-out koppel karakteristiek De pull-out koppel karakteristiek of ook de frequentie grens karakteristiek genoemd is te vergelijken met de koppel toerental karakteristiek van een willekeurig type motor. De stappenmotor is op snelheid waardoor er geen versnellingskoppel meer nodig is. De enige krachten die moeten overwonnen worden zijn het last- en het wrijvingskoppel van het mechanische systeem. Zoals eerder vermeld geeft de pull-out koppel karakteristiek de maximale stapfrequentie bij een bepaald mechanische belasting weer. Bij een stijgende viskeuze demping f v van het mechanische systeem zal deze karakteristiek naar links opschuiven (zie Figuur 16). De maximale snelheid van de stappenmotor is de stapfrequentie in onbelaste toestand waarbij enkel de viskeuze demping moet overwonnen worden. Figuur 16: Verloop van het 'pull-out' koppel en de invloed van de viskeuze demping Om tot deze snelheden te komen moet de stapfrequentie van de motor geleidelijk aan worden opgevoerd. Hierbij wordt vertrokken bij een stapfrequentie onder de pull-in grens die men geleidelijk laat toenemen. De pull-out koppel karakteristiek geeft de grens aan van de maximale snelheid bij een gegeven lastkoppel. Figuur 17: Invloed van de snelheid op de belasting van de stappenmotor Hoe hoger de snelheid van de stappenmotor hoe groter het aandeel van de wrijving. Het beschikbare versnellingskoppel daalt daardoor (zie Figuur 17). Tijdens het versnellen van de stappenmotor moet ook hier rekening mee gehouden worden. 11
21 2.3. De verschillende stapmodes Volledige stapmode Bij volledige stapmode, ook wel fullstep mode genoemd, worden beide fasen van de stappenmotor volledig bekrachtigd. Door fasen A en B afwisselend positief of negatief te maken zal de motor roteren. Merk op dat fasen A en B nooit stroomloos zijn. (zie Figuur 18). Hoewel er in full-step ook gestapt kan worden door maar één fase per stap te bekrachtigen, is het geleverde koppel 2 keer groter als beide fasen tegelijkertijd stroomvoerend zijn. Figuur 18: Volledige stapmode Half stapmode Half stapmode is praktische hetzelfde als volledige stapmode maar hierbij wordt gewerkt met een tussenstap. De fasen A en B zijn afwisselend samen of alleen, en afwisselend positief of negatief bekrachtigd (Figuur 19). Alhoewel er iets minder koppel beschikbaar is dan bij volledige stapmode wordt dit in de praktijk toch het meest toegepast omwille van de soepelere beweging, de fijnere stappen en de eenvoudige aansturing. Figuur 19: Half stapmode 12
22 Micro stapmode In micro stapmode gaat men de stroom door de fasen A en B evenredig maken met de sinus en de cosinus van een bepaalde fasehoek (zie Figuur 20). Daardoor kunnen er meer tussenstappen bereikt worden. Dit resulteert in een veel soepelere beweging van de rotor. Micro stapmode zorgt ook dat trillingen en geluid sterk worden gereduceerd door een beter gecontroleerde beweging van de rotor. Bij micro stapmode is het aantal tussenstappen veelal een macht van 2. Dit kan gaan van 1 tot 1 van een volledige stap Figuur 20: 1 micro stapmode Uitvoeringsvormen De permanent magneet stappenmotor De permanent magneet stappenmotor werd als voorbeeld gebruikt om de principiële werking ervan uit te leggen (zie Figuur 21). Het rotorveld zal zich aligneren met het veld opgewekt in de statorspoelen. Omdat de rotor uit een permanente magneet bestaat is er geen bijkomende magnetisatie nodig. Hierdoor is de motor compact. Er is een groter koppel voor eenzelfde volume mogelijk in vergelijking tot andere uitvoeringen van de stappenmotor. Figuur 21: Een permanente magneet stappenmotor (conceptueel) 13
23 De variabele reluctantie stappenmotor De variabele reluctantie stappenmotor is gebaseerd op het feit dat de rotor zich zo aligneert dat het magnetisch veld ontwikkelt in de stator de minste magnetische weerstand ondervindt. Deze stappenmotor is meestal uitgevoerd met een aantal fasen in de stator en een aantal tanden op de rotor. In figuur 22 is een principevoorbeeld van deze motor afgebeeld. Hierbij moet wel worden opgemerkt dat door de symmetrie de stappenmotor niet zou kunnen starten in volledige stapmode. Figuur 22: Variabele reluctantie stappenmotor (Conceptueel) Er zijn altijd net iets meer fasen dan rotortanden dat maakt ook dat de het statorveld sneller gaat roteren dan de rotor. De rotor zal ook roteren in de tegenovergestelde richting dan dit van het statorveld. Het grote nadeel van deze stappenmotor is het feit dat in stroomloze toestand er geen tegenwerkend koppel meer is. De motor kan dan vrij bewegen waardoor de bereikte positie verloren gaat De hybride stappenmotor In een hybride stappenmotor worden de voordelen van variabele reluctantie en permanent magneet stappenmotor gecombineerd. Zowel de stator en rotor worden vertand en zo kunnen er mechanische zeer gemakkelijk meer polen worden gerealiseerd (Figuur 23). Figuur 23: De hybride stappenmotor (conceptueel) De rotor wordt opgesplitst in twee delen die een halve tandsteek van elkaar worden verdraaid. Tussen die twee delen wordt een permanente magneet geplaatst. Zo wordt de magnetisatie van de rotor en de polarisatie van de tanden gerealiseerd. De koppelontwikkeling gebeurt volgens het reluctantie principe. 14
24 2.5. Het mathematische model Binnen het kader van het ISMA project werd reeds een mathematisch model van de stappenmotor gebouwd. De bedoeling was om aan de hand van dit model het gedrag van de stappenmotor makkelijker te onderzoeken. Door met dit model de meetprocedures te simuleren zoals gebruikt in de meetopstelling kan er gezocht worden naar eventuele verschillen. Voor deze verschillen moet dan een oorzaak worden gezocht. Dit kan eventueel leiden tot verbeteringen van dit model. Figuur 24: Het mathematische model Het mathematische model van de stappenmotor bestaat uit drie grote delen (zie Figuur 24). Het eerste deel beschrijft de elektrische dynamiek van de stappenmotor (groene en gele deel links), en omvat de elektrische eigenschappen van de stappenmotor. Een tweede deel van de stappenmotor omvat het mechanische systeem van de stappenmotor waarbij inertie, statische en dynamische wrijving de belangrijkste factoren zijn (centraal blauwe deel in figuur 24). Een laatste deel van dit model bevat de terugkoppeling van tegen-emk van de motor en de rotorpositie voor het werkelijke koppel op de rotor (groene en gele deel rechts) Elektrische dynamiek Dit deel van het stappenmotor model beschrijft het opbouwen van de stroom in het model. Via een hysteresisregeling wordt de gewenste stroom verkregen in de spoel van de stappenmotor. Deze hysteresis is niet anders dan het voortdurend aan en af schakelen van de bronspanning zodat de stroom binnen de gewenste grenzen blijft. De spanning over de fase is gelijk aan: U = V emk + ir i + L di dt (2.4) De omhse weerstand R en zelfinductie coëfficiënt L zijn eigenschappen van de motor en bepalen hoe snel een stroom kan worden opgebouwd in een spoel. Door nu een bepaalde spanning aan de fase aan te leggen zal er stroom gaan vloeien en wordt deze spoel gemagnetiseerd. 15
25 Mechanisch model De elektrische dynamiek van de stappenmotor zorgt er voor dat er koppel ontwikkeld wordt op de rotor om deze te doen ronddraaien. Aan de rotor is meestal nog een mechanisch systeem bevestigd. Het totale mechanische systeem van de stappenmotor wordt bepaald door volgende vergelijking: T T last = J d2 θ(t) d θ(t) dt 2 + f v dt + f c Hierin is: T : Het ontwikkeld koppel in Nm T last : Het lastkoppel in Nm J: De inertie in kgm² f v : De dynamische wrijving in Nm s/rad f c : De statische wrijving in Nm Deze differentiaal vergelijking bepaalt hoe met een zeker ontwikkeld koppel de rotor zal versnellen, vertragen of aan een bepaalde constante snelheid zal draaien Tegen EMK en positie terugkoppeling De elektrische dynamiek van het stappenmotor model heeft de waarde van de tegen-emk en de positie van de rotor nodig om te kunnen bepalen wat het koppel is dat inwerkt op de rotor. Want voor een bepaalde spoel is het koppel bepaald door: T = K m I max sin pθ en de tegen-emk door: V emk = K m ω sin pθ. Dit deel van het model zal uit de positie die bepaald wordt in het mechanisch model de tegen-emk en de hoek informatie gaan omrekenen voor de juiste spoel van de stappenmotor. Zo is de cirkel rond en zal dit model het gedrag van de stappenmotor beschrijven. 16
26 3. Opmeten basis karakteristieken van de stappenmotor Om een beter inzicht te krijgen in de juiste werking van de stappenmotor worden voor een gegeven type en model de basiskarakteristieken opgemeten. Dit zijn de koppel-hoek karakteristiek met daaruit het houdkoppel van de motor. De pull-in koppel karakteristiek die aangeeft van welke stapfrequentie er direct kan worden gestapt. De pull-out koppel karakteristiek die de maximale snelheid van de stappenmotor vastlegt. De stapresponsie waaruit de eigenfrequentie van de motor kan worden afgeleid. Daarnaast wordt de stappenmotor nog eens onderworpen aan verschillende snelheidsprofielen waarbij de rotorsnelheid bij de acceleratie van de motor wordt opgemeten. Voor elk van deze basiskarakteristieken is er een meetprocedure ontwikkeld. In dit hoofdstuk wordt kort de opbouw toegelicht. De implementatie van deze procedures gebeurde in Matlab. (Meer informatie hierover in de bijlage onder de titel de meetopstelling) 3.1. Koppel-hoek karakteristiek Zoals in hoofdstuk 2 werd uitgelegd geeft de koppel-hoek karakteristiek de positie van de rotor ten opzichte van het statorveld weer in functie van het aangelegde koppel. Het maximum van deze karakteristiek is het houdkoppel van de stappenmotor. Bij een belasting groter dan dit houdkoppel is de stappenmotor niet meer in staat de controle over de rotor te behouden. In een eerste stap wordt een meetprocedure ontwikkeld. Met behulp van deze procedure wordt de koppelhoek karakteristiek opgemeten. In een laatste stap worden daaruit enkele conclusies getrokken De meetprocedure Voor het starten van de meting wordt de motordriver geïnitialiseerd waarbij parameters zoals stroom, stapmode, richting van de stappenmotor en richting van de koppel motor worden ingesteld. De stapmode wordt ingesteld op 1 32 microstepping zodat iedere mogelijke positie van de rotor ingenomen wordt (blauwe meetpunten in figuur 25). Als de motor wordt geactiveerd zal deze starten in een fullstep positie. Nu de stappenmotor in zijn initiële positie staat kan het meten van de koppel hoek beginnen. Hierbij wordt telkens het koppel verhoogd met een bepaalde stap. Bij iedere verhoging van het koppel wordt de hoekverplaatsing opgemeten en opgeslagen. Wordt het koppel hoger dan het houdkoppel van de motor, dan zal de rotor doorschieten. Als de rotor doorschiet is de hoekverplaatsing groter dan twee fullstep-posities (zie theorie koppelhoek karakteristiek). De koppel-hoek karakteristiek en het houdkoppel voor deze microstappositie is nu gekend. Deze meting moet nu worden herhaald voor de overige 31 microstappen. Figuur 25: Meetpunten van de koppel-hoek meetprocedure Voor alle microstapposities zijn nu de koppel-hoek karakteristieken gekend. Maar in half-stap en in fullstep kan meer koppel op de rotor worden ontwikkeld door het feit dat spoelen A en B tegelijk worden bekrachtigd (rode meetpunten in figuur 25). Daardoor wordt de meting nog eens overgedaan voor de half-stap mode. 17
27 De enige meetvariabele voor deze meting is de stroom die aan de spoelen wordt gelegd. Bij micro stapmode wordt de ingestelde stroom vectorieel verdeeld over de twee fasen A en B. Zo is het ontwikkelde magnetisch veld in de stator in grootte altijd dezelfde. Bij half-stap mode is de resulterende stroom, wanneer de spoelen samen worden bekrachtigd, wortel twee keer groter dan de stroom die wordt ingesteld. Andere parameters voor deze meetprocedure zijn de koppelstap, het startkoppel, het stopkoppel en de wachttijd tussen het verhogen van het koppel. Deze parameters beïnvloeden enkel de nauwkeurigheid en de volledigheid van de meting. Op het einde van de meting worden de resultaten weergegeven in een grafiek en opgeslagen zodat ze later gemakkelijk terug opgevraagd kunnen worden. In figuur 26 wordt deze meetprocedure nog eens schematisch weergegeven. Figuur 26: De meetprocedure voor de koppel-hoek karakteristiek 18
28 De meetresultaten De meetprocedure om de koppel-hoek karakteristiek te bepalen werd uitgevoerd voor een gegeven stroominstelling. Praktisch kan er maar een deel van de theoretische koppel-hoek karakteristiek worden opgemeten. Als het aangelegde lastkoppel het houdkoppel van de stappenmotor overschrijdt slaat de rotor door. Er zijn m.a.w. voorbij het houdkoppel geen stabiele meetpunten. Het meetbare gebied is dus begrensd tot π θ π. 2 2 Figuur 27:Situatie bij te hoog tegenkoppel De resultaten van de meetprocedure voor de koppel-hoek karakteristiek worden geplot in een reeks grafieken, één voor iedere micropositie (blauw curves in Figuur 28). Afhankelijk van de micropositie is er een lichte variatie vast te stellen. De variatie van het houdkoppel over de 32 microposities bedraagt hierbij maximum 7%. (curve links) In sommige microposites is maximale hoek tussen het stator- en rotorveld groter dan de theoretische π radialen. Dit kan verklaard worden door het extra reluctantie effect in hybride stappenmotoren. 2 (curve rechts) Een tweede reeks grafieken geeft het houdkopel van iedere halfstap positie weer in het rood. Daarop is ook duidelijke een variatie van het houdkoppel te zien. In halfstap mode waarbij fase A en B tegelijk zijn bekrachtigd is het koppel 40% keer groter dan bij microstepping. Figuur 28: Meetresultaten koppel-hoek karakteristiek (links maximum houdkoppel in de absoluut gemeten positie; rechts genormeerd naar o) 19
29 Conclusies Uit de metingen van de koppel-hoek karakteristiek en het houdkoppel wordt geconcludeerd dat in iedere mircopositie en halfstap-positie de lasthoek tot één fullstep kan bedragen. Bij halfstap mode is het houdkoppel inderdaad 2 keer groter dan bij microstepping omdat op die positie de twee spoelen tegelijk 100% worden bekrachtigd. Bij microstepping is er een variatie van het houdkoppel van 7% mogelijk. Dit kan verklaard worden door afwijking op de bouw van de motor al dan niet in combinatie met een andere magnetische koppeling van de stator met de rotor op deze microposities. Als de opgemeten koppel hoek karakteristiek vergeleken wordt met zijn theoretisch vorm: T = T max sin pθ is er een kleine afwijking te zien (zie Figuur 29). Dit is te wijten door de aanwezigheid van een kleefkoppel. Dit kleefkoppel ontstaat door de tanden van de rotor die zorgen voor een extra reluctantie effect. Figuur 29: Theoretische vorm versus opgemeten vorm van de koppel-hoek karakteristiek 20
30 3.2. De Pull in koppel karakteristiek In hoofdstuk 2 werd de pull in koppel karakteristiek omschreven als de start - stop karakteristiek van de stappenmotor die aangeeft bij welke stapfrequentie en lastkoppel de stappenmotor kan starten zonder daarbij stappen te verliezen. In deze paragraaf wordt in een eerste stap een meetprocedure ontwikkeld. Met behulp van deze procedure wordt de pull in koppel karakteristiek opgemeten. In een laatste stap worden daaruit enkele conclusies getrokken De meetprocedure Voor de meting van start kan gaan moet de richting van het lastkoppel tegengesteld aan de richting van de stappenmotor worden ingesteld. Daarna worden de parameters voor de stappenmotor drive ingevoerd. De belangrijkste parameters zijn hierbij de stapmode, de stroom, de richting en de startfrequentie van de stappenmotor. Nu kan gestart worden met pulsen sturen. Daarbij wordt de tegen-emk en de lasthoek van de stappenmotor gemeten. Zolang de belastingshoek van de stappenmotor kleiner is dan 2 fullsteps kan de stappenmotor nog steeds starten met het aangelegde lastkoppel bij deze stapfrequentie. Als aan deze voorwaarde voldaan is wordt er gestopt met pulsen te sturen en wordt het lastkoppel verhoogd met een bepaalde koppelstap. Daarna worden er opnieuw pulsen gestuurd. Dit wordt gedaan tot de belastingshoek groter is dan 2 fullsteps, wat wil zeggen dat de motor niet meer kan starten bij die frequentie en lastkoppel. Vooraleer naar de volgende frequentie wordt gegaan, wordt ieder punt 5 keer opnieuw gemeten, dit om de betrouwbaarheid te verhogen. Enkel bij de eerste meting van iedere frequentie wordt het lastkoppel gestart vanaf 0 en wordt de tegen-emk gemeten. Bij de andere 4 metingen zal gestart worden op 75% van de vorige waarde (zie Figuur 30). Figuur 30: Het meten van 1 punt op de 'pull-in' of 'pull-out' karakteristiek. Als het pull in koppel 5 keer werd opgemeten bij een bepaalde frequentie wordt naar de volgende frequentie gegaan met een bepaalde frequentiestap. Het gemiddelde van deze 5 waardes wordt dan opgeslagen. Nadat de eindfrequentie van de meting wordt bereikt, is de meting gedaan en wordt de verzamelde data verwerkt in een grafiek. Bij de pull in koppel meting zijn de stroom en de stapmode de meetvariabelen. Bij een andere stroom en andere stapmode zal een ander resultaat naar gedrag van de motor bekomen worden. De start- en 21
31 stopfrequentie, frequentiestap, het start- en stopkoppel, de koppelstap zijn meetparameters die de resolutie en de grenzen van het meetbereik gaan bepalen. In figuur wordt deze meetprocedure nog eens schematisch weer gegeven. Figuur 31: De meetprocedure voor het opmeten van de 'pull-in' karakteristiek 22
32 De meetresultaten Voor een bepaalde stroom instelling van de motor wordt de pull-in koppel karakteristiek opgemeten. Dit wordt gedaan voor verschillende stapmodi van de motor driver. Omdat de dspace controller een vaste cyclus tijd heeft, kan er bij hogere stapmodi niet dezelfde meetresolutie worden bereikt (zie bijlage de meetopstelling). Op de opgemeten grafiek wordt het verloop van de karakteristieken bij hogere snelheden grilliger. Dit is te wijten aan de aansturing van de motor in combinaties met mechanische afwijkingen in de bouw van de motor. In het begin van iedere karakteristiek wordt telkens een dal in de karakteristiek waargenomen. Dit dal wordt veroorzaakt door de eigenfrequentie van de motor. Bij hogere stapmodi is dit dal in de grafiek minder uitgesproken. Dit komt omdat de stappen minder groot zijn en er dus minder hevige trillingen gaan plaats vinden. Afhankelijk van de stapmode gaat de karakteristiek net iets hoger liggen en kan de stappenmotor starten bij hogere snelheden (Figuur 33). Figuur 33: Meetresultaten 'pull-in' karakteristiek bij verschillende stapmodi Het verschil tussen stapmode 1 en de fijnere stapmodi is hier het grootst. Dit kan verklaard worden doordat bij 2 hogere mode er telkens net iets meer gemiddeld koppel beschikbaar is. Doordat bij hogere stapmodi er telkens meer tussenstappen worden gezet zal de koppel-hoek karakteristiek vloeiender overgaan naar de volgende stap. Het zetten van een stap is eigenlijk niets anders dan het verplaatsen van de koppel-hoek karakteristiek met een bepaalde hoek. Het verschil tussen hogere stapmodes wordt kleiner naarmate de stapmode stijgt en is daardoor minder merkbaar op de opgemeten grafieken. Figuur 32: Gemiddeld beschikbaar koppel bij 1/2 en 1/4 micro stapmode 23
33 Conclusies Uit de meetresultaten volgt: bij hogere stapmodi hebben de eigenfrequentie fenomenen een stuk minder inpakt op de pull-in koppel karakteristiek. Bij fijnere stapmodi ligt de karakteristiek ook net iets hoger. Een gevolg hiervan is dat de maximale pull-in frequentie niet iets hoger zal zijn. Als de meetresultaten worden vergeleken met het model waarop eenzelfde meetprocedure wordt uitgevoerd, zijn de resultaten redelijk gelijkaardig (Figuur 34). Het model is dus representatief voor het pull-in gedrag van een stappenmotor. 0.1 Pull Out Torque characteristic in mode 1/2, current 0.68mA Pull Out Torque (Nm) Pulse frequency (Hz) Figuur 34: Simulatie resultaten van het 'pull-in' koppel uit het mathematische model van de stappenmotor. 24
34 3.3. De pull out koppel karakteristiek In hoofdstuk 2 werd de pull out koppel karakteristiek vergeleken met een koppeltoerental karakteristiek van een gewone motor. Deze karakteristiek geeft weer wat de maximale snelheid is dat de stappenmotor kan stappen bij een bepaald lastkoppel. Om de pull out koppel karakteristiek te kunnen opmeten moet ook hier eerst een meetprocedure worden opgemaakt. Daarna wordt een bepaalde stappenmotor opgemeten en worden er enkele conclusies geformuleerd De meetprocedure De meetprocedure voor de pull out koppel karakteristiek is redelijk gelijkaardig als deze voor het opmeten van de pull in koppel karakteristiek. Ook hier worden eerst de richting van het lastkoppel en de parameters voor de stappenmotor ingesteld. Hierbij zijn de stroom, de stapmode, de startfrequentie en de richting van de stappenmotor de belangrijkste parameters. Het grote verschil tussen de pull in en de pull out koppel meetprocedure is dat hier geleidelijk aan wordt versneld tot aan de gewenste frequentie en niet meteen de stapfrequentie wordt aangelegd. Daarna pas wordt er een lastkoppel aangelegd en geleidelijk aan verhoogd. Bij de pull in koppel meetprocedure werd telkens de stappenmotor stilgelegd en daarna wordt het koppel verhoogd. Hier wordt het koppel verhoogd terwijl de motor nog op de gewenste frequentie draait. Op een bepaald moment wordt het lastkoppel te hoog voor de stappenmotor en gaat de stappenmotor stappen verliezen. Op dit moment is dan het pull out koppel voor die bepaalde frequentie gekend en wordt de motor gereset en begint de meting opnieuw voor de volgende frequentie. Ook deze meting wordt 5 keer opnieuw gedaan om de betrouwbaarheid te verhogen. Het principe is het zelfde als bij de pull in koppel meetprocedure waarbij vanaf de 2 de meting gestart wordt vanaf 75 % van het vorige lastkoppel. Ook hier wordt enkel tijdens de eerste meting de tegen-emk opgemeten. Bij de pull out koppel meetprocedure zijn de stroom en de stapmode de meetvariabelen. De andere parameters gaan ook enkel de resolutie en het meetbereik van de meting bepalen. Op figuur 35 wordt deze meetprocedure nog eens schematisch voorgesteld. 25
35 Figuur 35: Schematische voorstelling van de 'pull-out' koppel meetprocedure 26
36 De meetresultaten De pull-out koppel karakteristiek wordt voor een bepaalde stappenmotor opgemeten. Hierbij wordt een bepaalde stroom instelling gekozen en wordt de karakteristiek voor verschillende stapmodi opgemeten. Deze meetresultaten wordt in één grafiek weergeven. In deze grafiek wordt het pull-out koppel in functies van de werkelijke rotatiesnelheid van de motor uitgezet. Zo kunnen de verschillende stapmodi met elkaar worden vergeleken (Figuur 37). Hierbij is een eerste vaststelling dat bij snelheden rond de eigenfrequentie van de motor de karakteristiek bij 1 2 stapmode weinig tot zelfs geen lastkoppel kan overwinnen. Bij fijnere stapmodi zal dit fenomeen zich minder voordoen en kan er toch nog een behoorlijk lastkoppel worden overwonnen. Figuur 36: Inwerkend acceleratie koppel op de stappenmotor voor 1/2 en 1/4 micro stapmode De verklaring hiervoor zit opnieuw in het feit dat bij kleinere stapmodi de stapgrootte kleiner is. Op de koppelhoek karakteristiek is te zien dat het inwerkend versnellingskoppel minder groot wordt (Figuur 36). Zelfs het gemiddeld koppel voor een zelfde verplaatsing is een stuk kleiner (voor ¼ stapmode zijn 2 stappen nodig voor een zelfde verplaatsing in ½ stapmode waarbij 1 stap wordt gezet). Doordat minder overtollig koppel of versnellingskoppel wordt aangelegd gaat de rotor minder trillen. De tweede vaststelling is dat bij fijnere stapmode er een hoger lastkoppel mag worden aangelegd. De verklaring hiervoor is dan ook dezelfde als bij de pull-in koppel karakteristiek. Door fijnere stapmodi te gebruiken is er een hoger gemiddeld koppel beschikbaar waardoor een hogere belasting mogelijk is. Door het probleem met de vaste cyclus tijd van de dspace controller kunnen bij fijnere stapmode de hoge stapfrequenties niet worden bereikt waardoor de karakteristiek maar voor een beperkt gebied kan worden opgemeten( zie bijlage onder de titel dspace controller). Figuur 37: Meetresultaten van de 'pull-out' koppel karakteristiek voor verschillende stapmodi 27

37 Tijdens deze meting werd ook de belastingshoek of de load angle van de motor opgemeten (Figuur 38). Daarbij wordt vastgesteld dat de belastingshoek geleidelijk aan zal toenemen naarmate de belasting op de motor stijgt. Naarmate de stapfrequentie stijgt zal de belastinghoek reeds een grotere waarde bij nullast aannemen dit door de wrijving van het mechanische systeem. Figuur 38: De 'load angle' of de belastingshoek in functie van de stapfrequentie en het aangelegde lastkoppel Conclusies Uit de meetresultaten volgt: Bij fijnere stapmodi ligt de pull-out koppel karakteristiek net iets hoger. Bij fijnere stapmodi wordt de eigenfrequentie minder aangestoten waardoor een hoger koppel aangelegd kan worden. Doordat de hogere stapfrequentie bij fijnere stapmodes niet kunnen worden bereikt kan geen conclusie worden gevormd naar het maximale pull-out koppel bij nullast. Wel kan worden gezegd dat de aansturing van de stappenmotor hierin een grote rol speelt. Als de meetresultaten worden vergeleken met het model waarop eenzelfde meetprocedure wordt uitgevoerd, zijn de resultaten redelijk gelijkaardig (Figuur 39). Het model is dus ook representatief voor het pull-out koppel van een stappenmotor. Figuur 39: Simulatie versus meting van de 'pull-out' koppel karakteristiek 28
38 3.4. Stapresponsie Bij de stapresponsie van de stappenmotor wordt één stap gezet en wordt de werkelijke positie van de rotor geobserveerd. Omdat de stappenmotor drive het toelaat om tijdens de stap de tegen-emk op te meten in transparante mode is het ook hier interessant deze te gaan observeren. De transparante mode van stappenmotor drive laat toe om de tegen-emk tijdens de stap van de nuldoorgang volledig te kunnen zien. Meer uitleg over de stappenmotor drive en is te vinden in de bijlage van deze scriptie. Vooraleer metingen van de stapresponsie mogelijk zijn dient er een meetprocedure voor opgemaakt te worden. Daarna wordt een bepaalde stappenmotor opgemeten en worden uit de meetresultaten enkele conclusies gevormd De meetprocedure Voor het starten van de meting wordt de richting van het lastkoppel en de parameters voor de stappenmotor ingesteld. Hiervan zijn de stroom, de richting en de stapmode de belangrijkste parameters. Bij deze meting worden verschillende signalen realtime opmeten na een bepaald trigger signaal. Hiervoor moeten eerst de nodige instellingen geïnitialiseerd worden. Daarna kan het gewenste lastkoppel worden ingesteld en de meting worden gestart. Bij de start van de meting wordt de juiste frequentie naar de stappenmotor driver gestuurd. Tijdens de meting wordt de tegen-emk, de theoretische positie en de werkelijke positie van rotor opgemeten. Na een bepaalde wachttijd voor het bufferen van de samples worden deze uitgelezen. Na het uitlezen van de samples is de meting afgerond en wordt de data in enkele grafieken uitgezet. Om de meting later gemakkelijk opnieuw te kunnen oproepen worden deze opgeslagen. Bij deze meetprocedure zijn de stroom, de stapmode, de frequentie en het aangelegde lastkoppel de belangrijkste meetvariabelen. Er kan ook meegegeven worden hoeveel stappen er precies moeten worden opgemeten. Deze meetparameter heeft enkel invloed op het bereik van de meting en is daarom van ondergeschikt belang. Op figuur 40 wordt deze meetprocedure nog eens schematisch voorgesteld. Figuur 40: Schematische voorstelling van de meetprocedure voor de stapresponsie 29
39 De meetresultaten De meetprocedure voor de stapresponsie wordt voor verschillende frequenties uitgevoerd. Op de grafieken wordt telkens de theoretische en de werkelijke positie van de rotor weergegeven. Zo wordt een beter zicht verkregen van de beweging van de rotor tijdens het zetten van een stap. De stapresponsie wordt bekeken bij drie verschillende stapfrequenties. Dit is bij een stapfrequentie tientalmaal onder, op en tientalmalen boven de eigenfrequentie van de stappenmotor. De eerste stapfrequentie is een lage frequentie en ligt onder de eigenfrequentie van de motor. Daarbij wordt vastgesteld dat de motor zal oscilleren rond de positie die gewenst is (Figuur 41). De frequentie waarmee de rotor gaat oscilleren is de eigenfrequentie van de motor, deze bedraagt hier zo n 42 Hz (periode 24 ms). Het oscilleren van de rotor is uitgewerkt na 136 ms. Mechanical&Theoretical Position - Time Current: 680 Mode: 2 Frequency: 5 Torque: Mechanical position Theoretical position position (rev) time (s) Figuur 41: Stapresponsie bij zeer lage stapfrequenties De verklaring voor deze oscillaties kan worden verduidelijkt aan de hand van de koppel-hoek karakteristiek (Figuur 42). Bij het verplaatsen van een stap in de stator werkt er op dat moment plots een hoger koppel in op de rotor van de motor. Daardoor zal deze gaan versnellen. Op het moment dat de stappenmotor het nieuwe evenwichtspunt bereikt bezit deze nog een bepaalde snelheid en gaat deze voorbij dit punt. Daar ziet de rotor een negatief koppel, waardoor deze zal vertragen en uiteindelijk in de tegengestelde richting gaat bewegen. Na enkele oscillaties blijft de rotor stil staan in het evenwichtspunt. Bij de volgende stap gebeurt hetzelfde. Figuur 42: Het koppel op de rotor bij de stapresponsie Door de stapresponsie op te meten bij verschillende condities van het totale mechanische systeem werd vastgesteld dat de inertie van het systeem verantwoordelijk is voor de frequentie van de oscillaties. De demping van het mechanisch systeem zal bepalen hoe snel de oscillaties verdwijnen. 30
40 De tweede stapfrequentie is bij de eigenfrequentie van de stappenmotor. Hier wordt vastgesteld dat het oscilleren van de rotor zeer uitgesproken aanwezig is (Figuur 43). Het verschil tussen de theoretische positie en de werkelijke positie kan tot 0,024 radialen bedragen. Dit is groter dan één stap van de motor, die bij 1 2 stapmode 0,016 radialen is Mechanical&Theoretical Position - Time Current: 680 Mode: 2 Frequency: 43 Torque: position (rev) Mechanical position Theoretical position time (s) Figuur 43: Stapresponsie bij een stapfrequentie gelijk aan de eigenfrequentie Deze grote afwijking ten opzichte van de theoretische waarde komt omdat bij het zetten van de volgende stap de rotor net terug in het evenwichtspunt is maar op dat moment net een negatieve snelheid bezit. Daardoor wijkt deze nog even uit naar de tegengestelde richting. Daar krijgt de rotor nog een groter koppel ter beschikking en zal deze snel naar het volgende evenwichtspunt bewegen. Door zijn snelheid zal de rotor opnieuw te ver doorschieten en als de rotor daarna terug in het evenwichtspunt komt wordt de volgende stap gezet en begint dit gedrag opnieuw voor iedere stap. Bij fullstep leidt dit echter tot een te grote oscillatie waardoor de stappenmotor ter plaatse zal blijven trillen en dus stappen gaat verliezen. Bij microstepping heeft de stappenmotor minder last van de eigenfrequentie omdat de stapgrootte kleiner is en de rotor minder koppel krijgt om snelheid op te bouwen. De derde en laatste stapfrequentie is een frequentie die ver boven de eigenfrequentie ligt. Hierbij kan er niets van de eigenfrequentie in de stapresponsie worden teruggevonden en verplaatst de rotor zich aan een vaste snelheid (Figuur 44). Mechanical&Theoretical Position - Time Current: 680 Mode: 2 Frequency: 900 Torque: Mechanical position Theoretical position position (rev) time (s) x 10-3 Figuur 44: Stapresponsie bij een hoge stapfrequentie Hierbij krijgt de rotor net voldoende koppel om het evenwichtspunt te bereiken en krijgt deze de tijd niet om in dezelfde stap voorbij dit punt te gaan want de volgende stap wordt reeds gezet. 31
41 Conclusies Uit de stapresponsie van de stappenmotor kan de eigenfrequentie van de motor afgeleid worden. Omdat bij lage stapfrequenties het oscilleren volledig zichtbaar is tot de stappenmotor de evenwichtspositie van die stap bereikt heeft, kan hieruit de oscillatiefrequentie en de duur van het oscilleren afgeleid worden. De oscillatiefrequentie wordt vooral bepaald door de inertie van het mechanisch systeem en de duur van het oscilleren voornamelijk door de demping ervan. Zo kunnen daaruit gemakkelijk gegevens over het totale mechanisch systeem die aan de motor ligt berekend worden. Het is ook aangewezen om bij grote stapmodi (full step, half step) de stappenmotor niet aan te sturen met zijn eigenfrequentie. Hierdoor wordt het oscilleren versterkt en de motor maakt sneller kans om stappen te verliezen. 32
42 3.5. Acceleratie Deze meting zal het gedrag van de stappenmotor bij het accelereren gaan bekijken. Hierbij wordt een bepaald acceleratie profiel aangelegd. Er is de mogelijkheid om een lineair of S-vormig snelheidsprofiel aan de motor aan te leggen. Een S-vormig snelheidsprofiel zou de rotor minder gaan aanstoten en geleidelijker aan versnellen. Tijdens deze meting wordt zowel de positie, de snelheid en de acceleratie van de rotor bekeken. Voor er enige metingen naar acceleratie kunnen worden gedaan moet er een meetprocedure worden opgesteld. Daarna worden er voor een bepaalde stappenmotor metingen gedaan en worden er enkele conclusies gevormd naar het gedrag van de stappenmotor tijdens de acceleratie De meetprocedure Voor het starten van de meting worden de motorparameters (stroom, stapmode en richting) ingesteld. Net als bij de stapresponsie wordt gebruik gemaakt van het mlib protocol voor het binnen nemen van de realtime data. Ook hier moet de trigger en het aantal meetpunten voor dit mlib protocol worden geïnitialiseerd. In de dspace sturing voor de stappenmotor werd de mogelijkheid voorzien om verschillende snelheidsprofielen aan te leggen. Er kan worden gekozen voor lineair of S-vormig profiel. In deze meting is het mogelijk al te starten van een begin stapfrequentie daarom moet de stappenmotor eerst versnellen tot deze stapfrequentie voor de meting van start kan gaan. Daarna wordt het samplen van de verschillende meetvariabelen geactiveerd. Meetvariabelen zijn de theoretische en werkelijke positie, de tegen-emk en de werkelijke stapfrequentie. Na het bereiken van de startfrequentie kan de meting van start gaan. Eerst wordt met het gekozen snelheidsprofiel naar een eind stapfrequentie versneld. Na het bereiken van deze frequentie wordt een tijd gewacht. Daarna zal er met het gekozen snelheidsprofiel worden teruggegaan naar de begin frequentie. Zo wordt decceleratie van de stappenmotor ook opgemeten. Nu werd er een bepaald snelheidsprofiel aan de motor gelegd en nadat alle datapunten zijn binnengenomen is de meting afgerond. Met de verzamelde datapunten worden enkele grafieken geplot. Dit wordt opgeslagen om later gemakkelijk opnieuw te kunnen opvragen. In deze meetprocedure zijn de stroom, de stapmode, begin en eind stapfrequentie, en de acceleratietijd de parameters waarmee de meetresultaten kunnen worden beïnvloed. Op figuur 45 wordt deze meetprocedure nog eens schematisch voorgesteld. Figuur 45: Schematische voorstelling meetprocedure voor acceleratie 33
43 De meetresultaten Voor een bepaalde motor wordt het acceleratie gedrag onderzocht. Hierbij worden het lineaire en het S-vormig snelheidprofiel met elkaar vergeleken. Het gedrag wordt onderzocht voor verschillende stapmodi en acceleratietijden. Ook wordt gekeken wat de maximale belastingshoek kan zijn bij het onmiddellijk vertrekken aan een bepaalde snelheid. Als resultaat van de meetprocedure voor acceleratie wordt de gewenste snelheid, de werkelijk aangelegde snelheid en de werkelijke snelheid van de rotor uitgezet in een grafiek in functie van de tijd. De metingen worden telkens voor het S-vormig en lineair snelheidsprofiel uitgevoerd (Figuur 47 en Figuur 46). Figuur 47: Resultaat van een meting met het lineair snelheidsprofiel Figuur 46: Resultaat van een meting met het S-vormig snelheidsprofiel 34
44 Ondanks dat de oscillaties bij de stapresponsie bij hoge snelheden onmerkbaar leken, wordt vastgesteld dat de motor toch nog oscillerend gedrag vertoond. Dit kan verklaard worden aan de hand van de koppel-hoek karakteristiek (Figuur 48). Bij het starten van de motor zal in de eerste stappen de motor nog niet tot aan het evenwichtspunt zijn geraakt. Hierdoor krijgt de motor nog altijd een variërend koppel te zien en wordt er versneld en vertraagt met oscillaties tot gevolg. Eens er een vaste frequentie is bereikt zal uiteindelijk dit oscillerend gedrag gaan verdwijnen en de rotor zal aan een constante snelheid bewegen (Figuur 50). Figuur 48: Werkelijke positie van de rotor tijdens acceleratie De metingen worden gedaan voor verschillende stapmodi en acceleratietijden. Daarna worden deze met elkaar vergeleken en wordt gekeken naar het oscillerend gedrag. Hierbij kon worden vastgesteld dat bij de verschillende stapmodi en acceleratietijden het S-vormig snelheidsprofiel minder oscillerend gedrag vertoond dan het lineaire snelheidsprofiel. Dit verschil is echter niet groot. Hierbij moet ook worden vermeld dat het lineair snelheidsprofiel snellere acceleratietijden aankan dan het S-vormig snelheidsprofiel. Met deze meetprocedure wordt ook onderzocht wat de maximale belastingshoek of load angle kan bedragen bij het accelereren van de stappenmotor. Uit metingen bij verschillende stapmodi blijkt dat de belastingshoek tot bijna 180 elektrische graden of 2 fullsteps kan bedragen (Figuur 51 hierbij komt 0,01 toer overeen met 2 fullsteps). De voorwaarde hierbij is wel dat de rotor op het moment dat de belastingshoek 2 fullsteps bedraagt minimum tot net iets boven de snelheid van het statorveld is versneld. De snelheid van het statorveld komt overeen met de snelheid waarmee er wordt gestapt. Dit kan worden verklaard aan de hand van de koppelhoek karakteristiek (Figuur 49). Figuur 49: Mogelijke positie van de rotor tijdens acceleratie Daarop wordt afgeleid dat als de belastingshoek groter is dan één fullstep en het koppel, die inwerkt op de rotor, nog steeds groter is dan het tegenwerkend belastingskoppel de motor nog steeds een acceleratie koppel ondervindt (zie rotorpositie op figuur 49). Dit wil zeggen dat indien de rotor op dit moment nog niet de snelheid van het statorveld heeft bereikt er nog steeds een positief acceleratie koppel beschikbaar is om de rotor te versnellen. Zo kan deze alsnog die snelheid bereiken vooraleer het inwerkend koppel onder het belastingskoppel daalt en er stappen zullen worden verloren. 35
45 Figuur 50: Werkelijke, aangelegde en gewenste frequentie na directe acceleratie Figuur 51: 'Load angle' of belastingshoek na directe acceleratie 36
46 Conclusies Uit deze meetresultaten volgt: Tijdens en kort na de acceleratie ondergaat de rotor een oscillerend gedrag. Uit de metingen blijkt dat de het S-vormig snelheidsprofiel de beste resultaten gaat tonen naar het aanstoten van de eigenfrequentie (Tabel 1: cijfer 1 staat voor het beste resultaat) Profiel Stapmode Acceleratietijd Tabel 1: Invloed van de parameters stapmode en acceleratie op oscillerend gedrag bij het S-vormig en het lineair snelheidsprofiel Het lineair snelheidsprofiel kan snellere acceleratietijden behalen dan het S-vormig profiel. De belastingshoek kan tot 2 fullsteps of 180 elektrisch graden bedragen bij het accelereren van de stappenmotor. 37
47 4. Karakterisatie en analyse van de tegen-emk In dit hoofdstuk wordt de tegen-emk van de stappenmotor gekarakteriseerd. Het is belangrijk dat het gedrag van de tegen-emk voldoende gekend is vooraleer daarop kan worden verder gebouwd. Daarom wordt eerst dieper ingegaan op de theoretische achtergrond van de tegen-emk. Daarna wordt de tegen-emk diepgaand gekarakteriseerd. Tot slot wordt er geanalyseerd wat er met de tegen-emk mogelijk is Theoretische achtergrond tegen-emk Het begrip tegen-emk De tegen-emk steunt op de inductie wet van Faraday. Volgens deze wet wordt in een geleider die zich in veranderd magnetisch veld bevindt een spanning geïnduceerd. Wanneer er zich N geleiders in serie in een veranderend magnetisch veld d bevinden wordt de totaal geïnduceerde spanning: dt e = N d dt (4.1) In één fase van de stappenmotor wordt het magnetisch veld gegeven door: = m sin θ (4.2) Met deze uitdrukking voor de flux wordt volgende uitdrukking voor de tegen-emk bekomen: e = K m ω cos θ hierin is ω = dθ dt (4.3) De constante K m wordt bepaald door het aantal windingen N en de maximale flux m. K m is eigen aan de stappenmotor. De tegen-emk in deze uitdrukking is afhankelijk van de hoeksnelheid ω van de rotor en de cosinus van de doorlopen hoek ωt of θ. Figuur 52: Verband tussen de opgewekte tegen-emk, stroomvector i s, het rotorveld Φ m en de belastingshoek δ De hoek δ vormt de belastingshoek tussen het stator- en rotorveld (zie Figuur 52). Het statorveld wordt gevormd door de stroomvector i s. Het rotorveld Φ m wordt gevormd door de permanente magneet. De hoek δ wordt groter naarmate de mechanische belasting toeneemt. Daardoor gaan ook het rotorveld en de tegen- EMK verschuiven. 38
48 Het opmeten van tegen-emk Uit de voorgaande paragraaf blijkt dat de tegen-emk informatie bevat over de ogenblikkelijke hoeksnelheid en positie van de rotor. Om van deze informatie gebruik te kunnen maken moet ze worden opgemeten. De spanning in één spoel van een fase wordt gegeven door volgende vergelijking (zie ook figuur 53): U = V BEMF + ir i + L di dt (4.4) Figuur 53: Equivalent schema van een spoel Hieruit blijkt dat als de stroom i = 0 en bijgevolg ook de afgeleide naar de tijd, de spanning over de spoel enkel de gegenereerde tegen-emk is. M.a.w. de tegen-emk kan alleen gemeten worden tijdens de nuldoorgangen van de stroom in de spoel. Op dat moment is de stroom in de andere fase maximaal. Voor alle stapmodes geldt dat de stroom in elke fase 2 keer nul is per elektrische periode. Tijdens het stappen kan dus de tegen-emk 4 keer per elektrische periode worden gemeten. Er is een uitzondering. In fullstep worden beide fases tegelijkertijd bekrachtigd. De stroom in de spoel is dus nooit nul en er kan bijgevolg geen tegen-emk gemeten worden. Figuur 54: Meetpunten van de tegen-emk Als in spoel A de stroom nul is zal de stroom in spoel B maximaal zijn. Als de rotor onbelast is zal deze het statorveld gaan volgen. Op dat moment zal in spoel A de maximale tegen-emk worden gemeten. 39
49 Transiënt gedrag van de tegen-emk: Bij de nuldoorgang zal de stroom in de spoel niet onmiddellijk 0 zijn. Eerst wordt de stroom afgebouwd door een tegengestelde spanning over de wikkeling te plaatsen tijdens de zogenaamde fast decay fase. Nadien wordt de motorwikkeling vrijgegeven waardoor de gegeneerde tegen-emk kan gemeten worden. Er is echter nog wat reststroom en door de zelfinductiecoëfficiënt van de wikkeling ontstaat er een geïnduceerde spanningstransiënt L di. Voor de tegen-emk kan worden gemeten moet gewacht worden tot deze laatste transiënt is weggeëbd. dt Figuur 55: Transiënt gedrag van de tegen-emk Dit meetprincipe is door ON semiconductor gepatenteerd: EP A1. (zie bijlage) [1] 40

50 4.2. Karakterisatie van de tegen-emk In het hoofdstuk 3 werden metingen gedaan naar de positie en de belastingshoek van de motor. Hierbij werd ook telkens de tegen-emk opgemeten. Omdat deze resultaten zeer belangrijk zijn voor het verdere verloop van de masterproef worden in dit hoofdstuk de meetresultaten in detail besproken. Bij volgende karakteristieken is het gedrag van de tegen-emk interessant: Pull-out koppel karakteristiek Stapresponsie Acceleratie Stall De meetresultaten hiervan worden in onderstaande paragrafen verder besproken De tegen-emk bij de pull-out koppel karakteristiek Meetresultaten Tijdens het bepalen van de pull-out koppel karakteristiek werd de tegen-emk in ieder meetpunt gemeten. Dit resulteerde in een driedimensionale grafiek waarin de tegen-emk wordt uitgezet in functie van de stapfrequentie en het aangelegde belastingskoppel (Figuur 56). Figuur 56: De tegen-emk (BEMF) in functie van de belasting en de stapfrequentie Deze grafiek bevestigt dat de tegen-emk afhankelijk is van de belasting en de snelheid van de stappenmotor. Naarmate de snelheid stijgt gaat de tegen-emk stijgen en naarmate de belasting hoger wordt neemt de tegen- EMK af. 41
51 Dit komt omdat het rotorveld steeds verder naijlt op de stroomvector i s (toename belastingshoek δ). Omdat de tegen-emk steeds 90 voorijlt op het rotorveld zal ook deze meeschuiven met de belastinghoek δ. Dit zorgt ervoor dat op het moment wanneer de tegen-emk wordt gemeten er een lagere waarde zal worden geïnduceerd (Figuur 57). Figuur 57: De tegen-emk bij belasting Een belangrijke vaststelling uit deze grafiek is dat het verloop van de tegen-emk op bepaalde stapfrequenties discontinuïteiten vertoont. Op 782, 1516 en 3125 Hz wijkt de opgemeten spanning af van de verwachte waarde. Deze stapfrequenties zijn veelvouden van elkaar. In de analyse van de tegen-emk wordt hier dieper op ingegaan Afleiding uit het mathematische model Om de gemeten tegen-emk te kunnen vergelijken met een gekende waarde dient een formule te worden afgeleid waarin de tegen-emk functie is van het belastingskoppel en de hoeksnelheid van de stappenmotor. Hierbij wordt vertrokken van volgende formules: De opgewekte spanning voor spoel A en spoel B: E A = K m ω sin( pθ) E B = K m ω cos(pθ) (4.6) (4.7) Het geleverde koppel voor spoel A en spoel B: T A = K m I A sin( pθ) T B = K m I B cos (pθ) (4.8) (4.9) De mechanische eigenschappen van de motor en het aangekoppelde mechanische systeem: T EM = J dω dt + f vω + T last = T A + T B (4.10) De tegen-emk wordt opgemeten tijdens een nuldoorgang van de stroom, d. w. z.: Als I A = 0 dan is T A = 0 dan is T EM = T B T last en is ook I B maximaal. Dan kan E A geschreven worden in functie van T B : E A = K m ω sin ( bgcos T B T last ) K m I B (4.11) Met T B T last = J dω dt + f vω 42

52 Het pull-out koppel wordt gemeten als de hoeksnelheid van de motor in regime is. Daarbij wordt enkel de belasting geleidelijk aan opgevoerd. Daarom mag aangenomen worden dat dω = 0 en dat de inertie J van het systeem geen invloed heeft op het resultaat. De vergelijking van T B T last kan dus vereenvoudigd worden tot volgende formule: dt T B T last = f v ω (4.12) Hierbij is de hoeksnelheid ω gekend omdat de stapfrequentie wordt opgelegd aan de stappenmotor. Parameters f v en K m zijn constanten. T last is het belastingskoppel en wordt tijdens de meting ingesteld. Zo wordt de uitdrukking voor de tegen-emk bij het pull-out koppel: E tegen EMK = K m ω sin ( bgcos f vω+ T last K m I max ) (4.13) Met: ω de hoeksnelheid in rad/s T last het lastkoppel in Nm K m de motorconstante in Nm/A f v de viskeuze of dynamische wrijving Nm*s/rad I max de ingestelde maximale motorstroom in A U tegen EMK de tegen-emk in V Tijdens de meting van de pull-out koppel karakteristiek zijn de hoeksnelheid en het lastkoppel variabel. Alle andere parameters worden als constante beschouwd. Met deze formule kan dezelfde 3 dimensionale grafiek als op figuur 56 worden gesimuleerd (Figuur 58). Figuur 58: Berekende tegen-emk in functie de belasting en de stapfrequentie Deze gesimuleerde grafiek vormt een goede benadering van de werkelijk gemeten tegen-emk in de pull-out karakteristiek. Merk op dat er geen dalen of discrete nulpunten te vinden zijn bij bepaalde stapfrequenties. 43
53 De tegen-emk bij de stapresponsie De gebruikte stappenmotor driver van ON Semiconductor heeft de optie om de tegen-emk in transparante en niet-transparante mode ter beschikking te stellen op de SLA pin (zie bijlage motor driver). In transparante mode wordt de tegen-emk tijdens de volledige nuldoorgang van de stroom ter beschikking gesteld, inclusief het transiënt gedrag. In niet-transparante mode wordt enkel de laatste gesampelde waarde weergegeven nadat de nuldoorgang is beëindigd. Bij het karakteriseren van de stapresponsie van de stappenmotor werd de tegen-emk in transparante mode gecapteerd. Op die manier kon bij lage stapfrequentie de oscillatie van de rotor worden vastgesteld. De oscillatiefrequentie in de opgemeten tegen-emk is de eigenfrequentie van het totale mechanische systeem. In figuur 59 is de tegen-emk in functie van de tijd weergegeven na het aanleggen van een stap. Door gebruik te maken van een laagdoorlaat filter kan de ruis aanwezig op de eerste plot sterk onderdrukt worden (Figuur 60). BEMF - Time Current: 680 Mode: 2 Frequency: 5 Torque: BEMF (V) time (s) Figuur 59: Ruwe tegen-emk van de stapresponsie BEMF - Time Current: 680 Mode: 2 Frequency: 5 Torque: BEMF (V) time (s) Figuur 60: Gefilterde tegen-emk van de stapresponsie De bekomen grafiek laat niet alleen toe om uit de tegen-emk de eigenfrequentie te bepalen, maar ook de demping van het aangedreven mechanische systeem. Deze informatie kan zeer nuttig zijn bij de analyse van aandrijvingproblemen. 44
54 De tegen-emk bij acceleratie Mechanical&Theoretical Velocity - Time Current: 680 Mode: 2 Frequency: Accelerationtime: 2 RampType: S-shape 3 Mechanical velocity Theoritical velocity 2.5 Velocity (rev/s) time (s) Figuur 64: De werkelijke en theoretische snelheid van de stappenmotor Tijdens het versnellen en het vertragen van de stappenmotor wordt de tegen-emk gemeten. De bedoeling is na te gaan hoe de tegen-emk en bij uitbreiding de rotor, zich gedraagt tijdens het accelereren van de motor. Zo kan worden onderzocht of de rotor het opgelegde snelheidsprofiel kan volgen. In figuur 65 is de tegen-emk uitgezet in functie van de tijd. Er kan worden vastgesteld dat de rotor bij lage acceleratie het snelheidsprofiel goed volgt. Resonantie fenomenen zoals de eigenfrequentie van de motor spelen geen rol. 0.8 BEMF - Time Current: 680 Mode: 2 Frequency: Accelerationtime: 2 RampType: S-shape BEMF (V) time (s) Figuur 65: De tegen-emk tijdens S-vormig snelheidsprofiel Bij hogere acceleratie volgt de rotor en dus ook de tegen-emk minder goed het snelheidsprofiel omdat door de inertie de belastingshoek sterk varieert (Figuur 66). Bijkomend nadeel is dat bij een snelle acceleratie er minder nuldoorgangen worden doorlopen waarbij de tegen-emk kan worden gemeten. Hierdoor neemt de resolutie van de gemeten tegen-emk af. Merk op dat de gemeten tegen-emk periodiek sterke discontinuïteiten vertoont. Dit probleem is gelijkaardig aan het fenomeen gezien in de pull out koppelkarakteristiek. Figuur 66: De tegen-emk bij snelle acceleratie 45
55 De tegen-emk bij Stall Stall is de Engelse benaming voor het ongewenst blokkeren of het vastlopen van de stappenmotor. Doel is te onderzoeken hoe de tegen-emk in functie van de tijd verloopt vlak voor, tijdens en na een opgelegde blokkering. Om deze meting op een reproduceerbare manier uit te kunnen voeren is een meetprocedure opgesteld. De tegen-emk wordt gemeten met verschillende parameter settings. Uit de verzamelde meetdata kunnen enkele belangrijke conclusies getrokken worden De meetprocedure In deze meetprocedure wordt de maximale stroom en de stapmode van de motor driver ingesteld. Er kan een stapfrequentie of snelheid opgegeven worden waarbij de stall wordt uitgevoerd en de motor kan worden belast met een extern koppel. Een bijzondere parameter is de boolean die aangeeft of het stall detectie algoritme (zie verder) al dan niet moet worden ingeschakeld waardoor deze kan worden uitgetest. Het mlib protocol voor het opmeten van realtime data moet worden ingesteld. De belangrijkste instellingen zijn de trigger en de meetvariabelen. De meetvariabelen zijn de mechanische positie, theoretische positie en de tegen-emk. De motorparameters worden doorgegeven naar de motordriver. Na het instellen van de richting en de waarde van het extern belastingskoppel kan de meting van start gaan. Bij de start wordt naar de gewenste stapfrequentie geaccelereerd. Daarna wordt afhankelijk van de voorziene boolean het stall detectie algoritme ingeschakeld. Wanneer in de procedure het stall commando wordt gegeven. activeert in de meetopstelling de elektromagnetische rem. De rem kan overbrugd worden om verschillende soorten stall 1 te meten. Na een wachttijd wordt de EM rem gedeactiveerd. De meting is hierbij afgerond en er wordt gewacht tot alle meetdata is binnengenomen. Met deze meetdata worden enkele grafieken opgesteld. De data en de grafieken worden opgeslagen zodat de resultaten later kunnen worden geanalyseerd. Op figuur 67 wordt deze meetprocedure schematisch voorgesteld. Figuur 67: Schematische voorstelling van de 'stall' meetprocedure 1 Het blokkeren van de motor kan in de praktijk op verschillende manieren gebeuren. De as kan hard vastlopen op een eindpositie, maar dit kan ook een zachte of elastische botsing zijn. We onderscheiden volledige gedempte, gedeeltelijk gedempte, elastische, plastische en wrijvingsbotsingen. 46
56 De meetresultaten De meting wordt uitgevoerd met een bepaald type stappenmotor. Als resultaat wordt de mechanische-, theoretische positie en de tegen-emk in een grafiek uitgezet in functie van de tijd (Figuur 68). Zo wordt in een oogopslag een duidelijk beeld gegeven hoe de tegen-emk zich gedraagt bij het blokkeren van de motor. Figuur 68: De werkelijke -, theoretische positie en de tegen-emk bij een stall in functie van tijd Door metingen te doen bij verschillende stall condities wordt vastgesteld dat er naar gelang de soort botsing de tegen-emk een verschillend verloop zal vertonen. Soorten botsingen zijn volledige gedempte, gedeeltelijk gedempte, elastische, plastische en wrijvingsbotsingen. Bij al deze soorten botsingen zal de rotor en dus ook de tegen-emk anders gaan reageren. Dit impliceert dat het detecteren van een stall niet direct kan garanderen dat er ook geen stappen verloren gaan. Maar doordat bij een stall de motor praktisch stil gaat staan kan dit altijd op tijd worden gedetecteerd. Dit is zo omdat de tegen-emk ook afhankelijk is van de snelheid van de rotor. Een andere opgave is garanderen dat als er stall is gedetecteerd er ook geen stappen zijn verloren gegaan. Omdat bij een elastische botsing de energie die de rotor bezit door zijn inertie volledig wordt opgeslagen in een veer en daarna in de tegengestelde richting terug wordt vrijgegeven bestaat de mogelijkheid dat rotor in tegengestelde richting gaat roteren. Hierbij kan het zijn dat de stappenmotor niet in staat is deze energie tegen te werken. Zo kan het zijn, ook al is stall op tijd gedetecteerd, dat er toch nog stappen verloren gaan. Daarom zal de snelheidsgrens waarbij gegarandeerd kan worden dat er geen stappen verloren zijn gegaan zich bevinden rond de pull-in frequentie. Dit omdat de motor dan in staat is in één keer te versnellen tot de juiste frequentie. Daarom is de stappenmotor ook in staat de energie die zou zijn opgeslagen in een veer bij een elastische botsing ook terug op te vangen Conclusies Uit deze meetresultaten volgt: Stall detectie is mogelijk enkel door naar de tegen-emk te kijken. Stall detectie kan op tijd worden gedetecteerd. Het verliezen van stappen kan enkel gegarandeerd worden bij snelheden tot aan de pull-in frequentie van de motor. Boven de pull-in frequentie is het al dan niet verliezen van stappen afhankelijke van de soort botsing. 47
57 4.3. Analyse van de tegen-emk Bij het bepalen van de pull-out koppel karakteristiek werd vastgesteld dat het verloop van de tegen-emk op bepaalde stapfrequenties discontinuïteiten vertoont. Diezelfde discontinuïteiten werden gevonden in de acceleratie deceleratie curves. In deze paragraaf wordt een verklaring gezocht voor dit fenomeen. Ook wordt er een mogelijke oplossing voorgesteld. Verder worden ook bijkomende mogelijkheden van de tegen-emk onderzocht. Dit moet dan een basis vormen om intelligente algoritmes te ontwikkelen en uit te werken Verklaring fenomenen in de tegen-emk Het verloop van de tegen-emk bij de pull-out koppel meting vertoont discontinuïteiten. Diezelfde discontinuïteiten werden gevonden in de acceleratie deceleratie curves. Om dit fenomeen beter te bestuderen wordt een frequentie sweep gemaakt. De tegen-emk wordt gemeten bij verschillende discrete stapfrequenties waarbij de stappenmotor constant wordt belast. Op elke frequentie wordt een gemiddelde genomen van de gemeten tegen-emk. De resultaten worden geplot op een spannings frequentie karakteristiek (Figuur 69). 6 Frequency - BEMF Current: 680 Mode: X: 1042 Y: BEMF (V) 3 X: 625 Y: X: Y: X: Y: X: 1515 Y: frequency (steps/s) Figuur 69: De tegen-emk in functie van de stapfrequentie Er worden twee fenomenen waargenomen. Op de stapfrequenties 307, 385, 510, 769 en 1515 Hz, valt de tegen-emk helemaal terug tot op een minimum. Op de stapfrequenties 625, 1042 en 3125 Hz ontstaan er pieken in de tegen-emk naar een maximum. Beide fenomenen leiden er toe dat de gegenereerde tegen-emk zo goed als onbruikbaar is op deze discrete stapfrequenties. In verder onderzoek is gekeken naar de stapresponsie. In de geobserveerde tegen-emk wordt telkens dezelfde frequentiecomponent terug gevonden. M.a.w. de rotor van de stappenmotor vertoont een roterende oscillatie met een grondfrequentie van ongeveer 1550 Hz. Om de oorzaak van deze trilling verder na te gaan wordt de frequentie sweep in 3 andere omstandigheden overgedaan: motor los van de meetopstelling, motor gemonteerd maar zonder de koppelmotor, motor gemonteerd maar zonder bevestigingsplaat. De resonantie verdwijnt als de motor los van de meetopstelling wordt gemeten. In alle andere gevallen is deze nog steeds aanwezig. 48
58 Opnieuw werd de frequentie sweep overgedaan, nu met verschillende stapmodes. Onafhankelijk van de stapmode blijken beide fenomenen zich voor te doen op exact dezelfde stapfrequenties. Merk op dat dezelfde stapfrequenties in een verschillende stapmode betekent dat de rotatiesnelheid anders is. (Voorbeeld: bij eenzelfde stapfrequentie is in ½ stapmode de rotatiesnelheid twee keer groter dan bij dezelfde stapfrequentie in ¼ stapmode). Het feit dat de resonantie niet aanwezig is in de losgekoppelde stappenmotor en dat de pieken en dalen in de gegenereerde tegen-emk enkel afhankelijk is van stapfrequentie, maakt dat de trilling afkomstig is van de motorophanging, aangestoten wordt door het stappend karakter van de stappenmotor en nog eens versterkt wordt door de meetopstelling zelf. 49

59 Oplossing voor de fenomenen en het resultaat Verder onderzoek heeft uitgewezen dat signaalprocessing op de gecapteerde tegen-emk het mogelijk maakt de geobserveerde discontinuïteiten sterk te onderdrukken. Om na te gaan of deze signaalprocessing werkelijk tot betere resultaten leidt worden bepaalde grafieken opnieuw gemeten met deze optimalisatie. Dit wordt dan vergeleken met de vorige resultaten: Tegen-EMK bij frequentie sweep: Figuur 74: Resultaat optimalisatie tegen-emk bij frequentie sweep Tegen-EMK bij acceleratie: Figuur 75: Resultaat optimalisatie tegen-emk bij acceleratie Tegen-EMK bij pull-out koppel karakteristiek: Figuur 76: Resultaat optimalisatie tegen-emk bij meting 'pull-out' Uit deze resultaten blijkt de tegen-emk een heel stuk beter gedrag te vertonen. Impact van de resonantie frequentie is al heel stuk minder en de tegen-emk zal niet meer naar nul gaan zakken. De tegen-emk is nu beter geschikt om in algoritmes gebruikt te worden. 50
60 Verdere mogelijkheden van de tegen-emk Uit de karakterisatie van de tegen-emk en het onderzoek naar de vreemde fenomenen hiervan blijkt dat uit de tegen-emk heel belangrijke en relevante informatie kan gehaald worden. Deze bevat onder andere informatie over de snelheid, de belasting, de eigenfrequentie, de resonantiefrequenties en de demping van het totale mechanische systeem die wordt aangestuurd. Door de tegen-emk op een juiste manier te gaan interpreteren kan die informatie gebruikt worden om de stappenmotor beter te gaan aansturen. De tegen-emk biedt vier interessante mogelijkheden: De tegen-emk kan gebruikt worden als analyse middel om vreemd gedrag van de stappenmotor te gaan verklaren. Zoals uit vorige onderdelen is gebleken kunnen, door de tegen-emk te gaan bekijken, oorzaken van verschillende fenomenen worden achterhaald. Door de juiste signaal processing los te laten op de gecapteerde tegen-emk is deze zeer geschikt om gebaseerd hierop een stall detectie algoritme te ontwikkelen. Omdat de tegen-emk beschikbaar is tijdens de nuldoorgang van de stroom kan door de stapresponsie te gaan opvragen parameters van het mechanische systeem worden afgeleid. Dit zijn onder andere de demping en de inertie. Een meer geavanceerde manier om de tegen-emk toe te passen is om deze te gaan gebruiken als een rechtstreekse terugkoppeling. Zo kunnen er complexere algoritmes worden opgebouwd zoals een auto-speed of auto-torque. Bij auto-speed is het de bedoeling dat de aansturing automatisch zo snel mogelijk van de ene positie naar de andere verplaatst. Auto-torque moet ervoor zorgen dat bij het gewenste snelheidsprofiel automatisch het nodige koppel wordt aangelegd. 51
61 5. Stall detectie algoritme In de analyse van de tegen-emk, gegenereerd in de stappenmotor, werd deze tegen-emk geoptimaliseerd zodat het werkingsgebied zo ruim mogelijk is. Op die manier is deze nu geschikt om te gebruiken in een stall detectie algoritme. In dit hoofdstuk wordt het ontwikkelde algoritme in detail uitgelegd en wordt dit algoritme uitgetest in een werkelijke toepassing. Uiteindelijk wordt dit stall detectie algoritme in een microcontroller toegepast die dan wordt geïntegreerd in een demo-opstelling. Dit stall detectie algoritme werd gebaseerd op eerder ontwikkelde algoritmes rond stall detectie in ON semiconductor [2]. Hierbij is echter onderliggende gedachtengang veel meer gegrond Het concept van het stall detectie algoritme Vooraleer een stall detectie algoritme kon worden gemaakt, wordt er een concept uitgewerkt. In dit concept wordt het principe waarop het algoritme steunt uitgelegd. Het concept bestaat uit vijf grote delen die elk hun eigen functionaliteit kennen. Een eerste deel bevat de nabewerking van de tegen-emk die steunt op de informatie uit de karakterisatie en analyse van de tegen-emk. Hierbij wordt de tegen-emk uitgelezen met een A/D convertor. Dit ruwe signaal wordt dan bewerkt. Deze geoptimaliseerde tegen-emk wordt dan in het verdere algoritme gebruikt. Een tweede deel gaat bepalen wanneer het stall detectie algoritme geactiveerd mag worden. Want bij te lage snelheden of tijdens acceleratie kan stall detectie niet gebruikt worden. In dit deel wordt dus het werkingsgebied bepaald voor zowel de absolute als de delta threshold. Eveneens wordt uit de werkelijk aangelegde pulstrein ( RealNXTFrequency ) de werkelijke snelheid berekend. Dit wordt dan gebruikt in zowel de absolute als de delta threshold. Een derde deel is de absolute threshold van het algoritme. Dit deel gaat de tegen-emk gaan vergelijken met een bepaalde absolute waarde. Als de tegen-emk onder deze waarde daalt zal stall worden geactiveerd. Deze threshold is voornamelijk bedoeld om een trage blokkering van de stappenmotor te detecteren. Een vierde deel bevat de delta threshold. Hierbij wordt afhankelijk van de vorige waarde van de tegen-emk gekeken of het verschil niet te groot wordt. Als dit verschil te groot is zal ook hier stall geactiveerd worden. Deze threshold zal voornamelijk gaan reageren bij snelle blokkeringen van de stappenmotor. Als de absolute threshold of de delta threshold aangeeft dat er een stall optreedt zal de stall detected parameter worden geactiveerd. Dit wordt dan ook doorgegeven naar het hoger liggende besturingsniveau. Het resetten van de stall detectie kan dan ook enkel gebeuren door het hoger liggende systeem. Na het resetten kan de stappenmotor weer op de normale manier worden aangestuurd. Een vijfde en laatste deel in het algoritme bevat de motorcontroller die bij een stall de controle over de stappenmotor gaat overnemen. Dit deel wordt geactiveerd door de stall detected parameter en zal de stappenmotor doen terugkeren naar de fullstep waarbij nog geen stall werd gedetecteerd. Nu worden deze vijf onderdelen meer in detail besproken. Op figuur 77 wordt dit stall detectie algoritme schematisch weergegeven. De gedetailleerde uitwerking van dit concept is terug te vinden in de bijlage. 52
62 Figuur 77: Overzicht schema van het 'stall' detectie algoritme 53
63 Nabewerking tegen-emk De tegen-emk wordt binnen genomen via een A/D convertor. De range van de tegen-emk is 0 tot 20 volt, waarbij best een resolutie van 0.05 Volt wordt aangehouden. Een 10 bit A/D convertor is hier ruim voldoende. In dit onderdeel van het stall detectie algoritme wordt de binnengenomen tegen-emk na bewerkt voor de reden die werd besproken tijdens de analyse van de tegen-emk. In de tegen-emk traden nog enkele fenomenen op. Door dit te gaan onderzoeken werd de oorzaak hiervan uitgeklaard en kon door reeks van verbeteringen de tegen-emk worden geoptimaliseerd. Deze optimalisatie zorgde voor een tegen-emk die bruikbaar werd om een stall detectie mee te ontwikkelen. Hierdoor is er nu een geoptimaliseerde tegen-emk beschikbaar waarop beslissingen kunnen worden genomen. Hierop bouwt de rest van het algoritme verder om een beslissing te nemen of de stappenmotor werd geblokkeerd. 54
64 Werkingsgebied stall detectie algoritme + werkelijke snelheid De tegen-emk is recht evenredig met de snelheid van de rotor. Daarom zal bij zeer lage snelheden de tegen- EMK te laag zijn om stall correct te detecteren. Om deze reden wordt het stall detectie algoritme bij lage snelheden uitgeschakeld. Om dit uit te voeren wordt uit de aangelegde stapfrequentie, de werkelijke aangelegde snelheid berekend. n aangelegd = f stap Aantal fullsteps per rotatie stapmode (5.1) Deze werkelijke snelheid wordt vergeleken met de ingestelde minimale snelheid (Figuur 81). Als de werkelijk aangelegde snelheid boven deze minimale snelheid ligt mag de absolute threshold van het stall detectie algoritme worden geactiveerd. Als wordt gestart met een snelheid directe boven deze minimale snelheid is de eerste tegen-emk die het algoritme gaat zien onbruikbaar. Dit komt omdat deze tegen-emk werd opgemeten wanneer de stappenmotor nog stil staat (de tegen-emk is dan praktische nul). Om hierdoor geen valse stall te detecteren moet deze eerste waarde worden genegeerd. Figuur 81: Werkings gebied stall detectie algoritme Bij het accelereren van de stappenmotor is het mogelijk dat er door de delta threshold ook stall wordt gedetecteerd, terwijl de rotor nog in staat is de stator van de stappenmotor te volgen. Daarom wordt een settling time t settling gewacht vooraleer de delta threshold van het stappenmotor algoritme wordt geactiveerd. De delta threshold van het algoritme wordt maar geactiveerd na de settling time en als de opgelegde snelheid hoger is dan de minimale snelheid. De verstreken tijd die wordt vergeleken met de settling time wordt berekend aan de hand van de positie t o v fullstep, de stapmode en de stapfrequentie van de motor. t = Count( Positie t o v fullstep = 1) stapmode f stap (5.2) Bij de waarde 1 van de positie t o v fullstep wordt een teller gekoppeld, deze telwaarde wordt dan vermenigvuldigd met de tijd tussen 2 telwaardes. Zo krijgen we tijdswaarde die verspringt per nieuwe tegen- EMK die wordt binnen genomen. Wanneer deze tijd over de tijd t settling gaat wordt de delta threshold geactiveerd. 55
65 De absolute threshold De absolute threshold zal de werkelijke tegen-emk gaan vergelijken met een absolute grens van de tegen-emk. Deze absolute grens is een minimum waarde. Als de tegen-emk hieronder daalt, wordt stall gedetecteerd. De grens wordt enerzijds bepaald door een minimum waarde en anderzijds door een snelheidsafhankelijke waarde. Telkens wordt de hoogste waarde van beide als grens beschouwd. De snelheidsafhankelijke waarde wordt als volgt berekend: V ondergrens = n 2π K m Minimum percentage (5.3) Hierin is n de omwentelingssnelheid in rev/s en K m de motorconstante. Het minimum percentage bepaalt hoeveel procent de ondergrens ten opzichte van de maximale tegen-emk moet bedragen. De absolute threshold in dit algoritme wordt slechts actief als het enable signaal hoog wordt (Figuur 82). Figuur 82: De absolute threshold 56
66 De delta threshold Het delta threshold blok van het stall detectie algoritme zal op de werkelijke tegen-emk een delta threshold berekenen. Daarbij wordt uit de werkelijke tegen-emk een hoek bepaald waarbij een delta hoek wordt geteld, daaruit wordt een nieuwe tegen-emk berekend. Deze nieuwe tegen-emk wordt dan vergeleken met de tegen- EMK uit de volgende stap. De nieuwe tegen-emk wordt als volgt berekend: ω = 2π n (5.4) δ = bgcos( U tegen EMK U offset ) K m ω U detla tegen EMK = K m ω cos (δ + δ delta ) (5.5) (5.6) Hierbij is n de werkelijke snelheid in rev/s en K m de motorconstante van de stappenmotor. De δ delta is de maximale belastingshoek waarmee de volgende tegen-emk mag verschillen. Is deze hoek groter dan wordt de stall detectie geactiveerd. U offset wordt ingevoerd voor de juistheid van deze hoek en omdat er op de tegen- EMK een offset aanwezig is. De delta threshold van het stall detectie algoritme wordt pas geactiveerd als de enable ervan hoog is (Figuur 83). Figuur 83: De delta threshold van de tegen-emk 57
67 De motorcontroller bij stall Indien een stall gedetecteerd werd zal de controle van de stappenmotor overgenomen worden door het stall detectie algoritme. Hierbij zal de motor gaan terugkeren naar de positie waar de rotor stond bij het detecteren van de stall detectie. De positie van de rotor is gekend omdat stall wordt gedetecteerd wanneer de belastingshoek te groot is. Dit wil zeggen dat op het moment wanneer stall gedetecteerd wordt komt de rotor 90 elektrische graden achter op het statorveld. Daarom wordt het statorveld teruggedraaid naar de positie waar de stappenmotor zich op dat moment bevindt. Het terugkeren van het statorveld gebeurt door een hoge frequentie aan te leggen voor dit aantal stappen in de tegengestelde richting. De stapfrequentie moet zo hoog zijn dat de rotor deze zeker niet kan volgen. Zo kan indien de stappenmotor in die mate hard gebotst heeft dat er enkele stappen werden teruggekeerd toch nog voorkomen worden dat deze stappen verloren gaan 2. Zodat de theoretische positie nog overeen komt met de werkelijke positie. Figuur 84: Terugstappen van de motor bij 'stall' detectie. 2 Dit kan enkel bij elastische botsingen. Als het mechanisch systeem botst tegen een eindeloop of een vast object wordt de energie, die het mechanisch systeem bezit, door de elasticiteit volledig teruggekaatst in de tegenovergestelde richting. Als bij voldoende grote snelheid de energie zo groot is dat de stappenmotor dit niet kan opvangen zal als reactie op de botsing de stappenmotor verschillende stappen in de tegen gestelde richting draaien. 58
.")

68 5.2. Werkelijke toepassing voor het stall detectie algoritme Het concept van het Stall detectie algoritme werd uitgewerkt in Simulink (zie bijlage) en geverifieerd op de meetopstelling. Om de correcte werking in de praktijk te confirmeren is volgende testopstelling gebruikt. Een PM stappenmotor die een lineaire beweging maakt, stuurt een drieweg of mengklep aan (Figuur 85). Deze klep mengt koud en warm water in verwarmingstoestellen. De positie van de klep bepaalt de mengverhouding (Figuur 86). Een fabrikant van verwarmingstoestellen gebruikt zo n klep in hun toestel en heeft werkende elektronica die in staat is om deze stappenmotor aan te sturen. Afhankelijk van de gewenste temperatuur wordt de stappenmotor van de klep aangestuurd. Deze elektronica houdt niet bij waar de klep zich bevindt ten opzichte van zijn mechanische grenzen. Figuur 85: De mengklep met stappenmotor Voor de fabrikant is het nodig dat deze klep om de zoveel tijd eens helemaal open en dicht gaat. Dit om kalkafzetting te vermijden en de levensduur van de klep te verlengen. Doordat de controller in het verwarmingstoestel niet exact weet waar de klep zich bevindt ten opzichte van de onder en boven grens, zal de elektronica het commando geven om genoeg stappen te zetten zodat deze grenzen zeker worden bereikt. Het probleem bij deze manier van werken is dat de klep op een bepaald moment tegen de mechanische grens van de klep aanstoot en dit een vervelend lawaai maakt. Dit lawaai is op het eerste zicht niet erg als het overdag zou optreden. Maar de elektronica bezit geen klok waardoor er niet de mogelijkheid is dit telkens overdag te laten gebeuren. Daarom kan dit vervelend lawaai ook s nachts voorkomen. De gebruikers van deze verwarmingstoestellen die s nachts hun nachtrust op prijs stellen kunnen dit lawaai wel missen. Omdat de fabrikanten van deze verwarmingstoestellen hun elektronica niet wensen te vervangen. Is er de vraag om een stall detectie op deze kleppen toe te passen die afzonderlijk van hun elektronica kan werken. Figuur 86: Detail beeld klep Daardoor is deze toepassing een ideale manier om het stall detectie algoritme op toe te passen. Door de juiste parameters van het algoritme in te stellen kan deze stappenmotor door de meetopstelling worden aangestuurd en worden getest op stall. Daarbij wordt de klep één keer met en één keer zonder stall detectie uitgetest. Daarbij wordt telkens tot aan de mechanische grens van de klep gestapt en gekeken wat de tegen- EMK doet en hoe het algoritme hier op zal reageren. Figuur 88 geeft de tegen-emk weer tijdens de beweging naar en de botsing tegen de mechanische grens. Hierbij is de stall detectie gedeactiveerd. Op Figuur 87 werd dezelfde meting gedaan maar werd de stall detectie wel geactiveerd. Op het moment waarbij de stappenmotor tegen de mechanische grens aanloopt grijpt het algoritme in en worden geen stappen meer gezet. 59

69 Figuur 88: De tegen-emk bij de aansturing van de klep tot tegen zijn mechanische grens met 'stall' detectie disabled Figuur 87: De tegen-emk bij de aansturing van de klep tot tegen zijn mechanische grens met 'stall' detectie enabled 60
70 5.3. Omvorming naar code voor microcontroller Om dit algoritme te kunnen gebruiken in een microcontroller dient de vertaalslag te gebeuren van Simulink naar C code. Deze code moet universeel zijn zodat het mogelijk is ze te kunnen implementeren in verschillende soorten microcontrollers. Het manueel omvormen van het in Simulink ontwikkelde stall detectie algoritme naar een universele C code die overzichtelijk en gebruiksvriendelijk is neemt een heel pak tijd in beslag. Deze C code is daarom ook nog niet opgenomen in deze thesis. In ON semiconductor zijn er reeds plannen om dit uit te voeren. Ondertussen werd er ook door MathWorks een product ontwikkeld die gemakkelijk ontwikkelde code in Simulink kan omzetten naar C of C++ code. Zo kan het ontwikkelingsproces worden versneld en is het veel eenvoudiger software prototypes te gaan maken. [3] 61
71 6. Het concept voor een auto-acceleratie algoritme Als uitbreiding wordt de mogelijkheid onderzocht om een geavanceerd algoritme te bouwen rond de tegen- EMK die dient als feedback. Met dit algoritme is het de bedoeling dat de stappenmotor driver met behulp van de tegen-emk zelf de eigenschappen van stappenmotor en last kan bepalen. In deze parameters zitten onder andere de eigenschappen van het totale mechanische systeem. Met deze parameters kan de motor driver bepalen wat de maximale versnelling mag zijn. Op die manier is het de bedoeling dat de stappenmotor zo snel en efficiënt mogelijke wordt aangestuurd. Eerst wordt de mogelijkheid uitgewerkt om uit de tegen-emk tijdens de stapresponsie de dynamische wrijving en inertie van het mechanisch systeem te halen. Daarna wordt bekeken op welke manier de stappenmotor dan kan worden aangestuurd om zo snel mogelijk te versnellen Bepalen van de mechanische eigenschappen uit de tegen-emk Vooraleer er uit de stapresponsie van de tegen-emk enige parameters kunnen worden afgeleid moet eerst de wiskundige formule voor deze stapresponsie worden opgesteld Formule voor de stapresponsie van de tegen-emk Er wordt vertrokken van de algemene differentiaal vergelijking voor het mechanisch systeem: T = J d2 θ(t) d θ(t) + f dt 2 v dt + K v θ(t) (6.1) Hierin is: T : Het koppel in Nm J: De inertie in kgm² f v : De dynamische wrijving Nm s/rad K v : De hoekverdraaiing in Nm/rad De factor K v θ(t) wordt weggelaten omdat de invloed van deze factor in de meeste mechanische systemen verwaarloosbaar klein is ten opzichte van de andere factoren. De differentiaal vergelijking wordt nu: T = Jθ + f v θ (6.2) Het koppel verloop die de stappenmotor uit oefent op het mechanische systeem als er een stap wordt aangelegd is zoals afgebeeld op figuur 89. Figuur 89: Het koppel bij de stapresponsie 62
72 Daarop is te zien dat bij het zetten van een stap ( hier in halfstapmode) de stappenmotor gaat versnellen tot deze op zijn nieuwe positie aankomt waarrond deze dan nog even zal gaan trillen. Het verloop van het koppel kan worden gelineariseerd volgens kθ. Op figuur 90 wordt het aangelegd koppel bij een stap weergegeven. Figuur 90: Equivalent verloop voor het koppel van de stappenmotor Dit kan worden gezien als een koppel stap en een negatieve helling volgens kθ (Figuur 90). De differentiaal vergelijking ziet er nu als volgt uit: T(stap) kθ = Jθ + f v θ T(stap) = Jθ + f v θ + kθ (6.3) (6.4) Met Laplace kan de transfert vergelijking voor dit system worden opgemaakt: L{T(stap)} = L Jθ + f v θ + kθ (6.5) θ(s) = 1 T(s) Js²+f v s+k (6.6) Voor één stap is: θ(s) = 1 Js 2 + f v s + k T(s) met T(s) = 1 s (6.7) De tegen-emk is eigenlijk niet anders dan de afgeleide van de positie maal een constante K m : U(s) = K m ω(s) = K m θ(s) s (6.8) Voor één stap wordt dit: U(s) = K m 1 Js 2 +f v s+k 1 s s = K m 1 Js 2 +f v s+k (6.9) Hieruit wordt vast gesteld dat θ(s) T(s) een 2de orde systeem is: K ω n 2 s² + 2ζω n + ω n 2 1 J s 2 + f v J s + k J (6.10) Hierbij is: K = 1 k (6.11) 2ζω n = f v J (6.12) ω n 2 = k J (6.13) 63
73 Om nu een wiskundige uitdrukking te krijgen voor de stapresponsie van de tegen-emk in meetbare grootheden moet de inverse laplace worden toegepast: U(s) = K m K L 1 {U(s)} U(t) = K stap K m K ω n 2 s²+2ζω n +ω n 2 ω n 1 ζ² e ζω nt sin (ω n 1 ζ 2 t) (6.14) (6.15) Hierbij is: K = 1 k en K stap = 1 4 Poolparen stapmode 2π Figuur 91: Verloop tegen-emk tijdens de stapresponsie Uit deze wiskundige uitdrukking kan de eigenpulsatie ω n en de relatieve demping ζ worden gehaald door 2 meetpunten van deze stapfrequentie op te meten: Stel: a = K stap K m K ω n 1 ζ² en b = ζω n en de meetpunten U 1 en U 2 op t 1 en t 2 Daaruit volgen 2 vergelijkingen: U 1 = a e bt 1 en U 2 = a e bt 2 U 1 = U 2 e (bt 2 bt 1 ) (6.17) (6.16) Hieruit kan b worden gehaald: b = ln (U 1 U2 ) = ζω t 2 t n = 1 f v 1 2 J (6.18) In deze afleiding kan de term sin (ω n 1 ζ 2 t) worden weggelaten omdat de meetpunten telkens op de pieken van de stapresponsie gaan gemeten worden. Zoals op figuur 91 staat aangegeven volgen de pieken in ω de stapresponsie de formule K stap K m K n 1 ζ² e ζωnt. Op dat moment is de term sin (ω n 1 ζ 2 t) dan ook altijd gelijk aan 1. 64
74 Uit de afleiding tot nog toe is nog maar een oplossing voor de 2 onbekende, ω n en ζ. Daarom is er nog een tweede uitdrukking nodig. Van een 2 de orde proces is de periode van de oscillaties reeds gekend: (t 2 t 1 ) ω n = 2π 1 ζ² (6.19) Daaruit kan dan een 2 de vergelijking worden gehaald: ω n 2 = 4π² (t 2 t 1 )² + (ζω n) 2 = 4π² (t 2 t 1 )² + b² = k J (6.20) Voor de stapresponsie van de tegen-emk is nu de uitdrukking gekend en zijn er formules om uit 2 meetpunten de inertie J en de viskeuze wrijving f v van het mechanisch systeem te berekenen. Enkel de waarde k is nog niet bekend. Maar dit is eigen aan de motor en afhankelijk van de stroom. Dit kan worden afgeleid uit de koppel hoek karakteristiek van de motor Berekenen van de mechanische eigenschappen uit de stapresponsie Zoals reeds is vermeld worden de mechanische eigenschappen uit de stapresponsie berekend aan de hand van twee meetpunten ( U 1, t 1 en U 2, t 2 ). De formules om uit deze twee meetpunten de mechanische eigenschappen te halen zijn gekend. Er dient enkel nog een manier te worden ontwikkeld om U 1 en U 2 correct op te meten. Figuur 92: De meetpunten bij de tegen-emk Uit de karakterisatie van de tegen-emk bij de stapresponsie is gebleken dat er bovenop deze tegen-emk nog ruis en een spanningsoffset aanwezig zijn. Daarvoor dient deze spanningsoffset opgemeten te worden en moet er een laagdoorlaat filter worden gebruikt vooraleer de stapresponsie van de tegen-emk kan gebruikt worden. Daarom moet in de formule een aanpassing worden gedaan zodat deze spanningsoffset gecompenseerd kan worden. De formules waaruit de relatieve demping en de eigenpulsatie van het mechanische systeem kan worden gehaald zijn nu als volgt: b = ln (U 1 offset U2 offset ) = ζω t 2 t n 1 4π² (t 2 t 1 )² + b² = ω n 2 (6.21) (6.22) 65
75 Het voorgaande wordt in Simulink toegepast (uitwerking hiervan zit in de bijlage onder de titel Mechanische parameters uit stapresponsie ). In dit model wordt gezorgd dat de twee meetpunten worden genomen voor een aantal stapresponsies. Bij iedere stap wordt nu de periode en de spanningsafname van de tegen-emk gehaald. Dit is niet anders dan (t 2 t 1 ) en de U 1 offset. Hiervan wordt een gemiddelde genomen over het U 2 offset totaal aantal opgemeten stapresponsies. Nu de gemiddelde periode en de gemiddelde spanningafname gekend is kan hieruit, met de afgeleidde formules, de relatieve demping ζ en de eigenpulsatie ω n worden bepaald. De resultaten van deze meting zijn veel belovend. Deze bewijzen de mogelijkheid om uit de stapresponsie van de tegen-emk gegevens van het totale mechanische systeem te halen. Op de decay BEMF U 1 offset zit er nog grote variatie (Figuur 93). Door de meting over meerdere U 2 offset stapresponsies te herhalen, kan een gemiddelde van deze waardes een goede benadering zijn voor de werkelijke waarde. Decay BEMF - Time Current: 680 Mode: 2 Frequency: 5 2 Decay BEMF (V/V) time (s) Figuur 93: De spanningsafname U 1 /U 2 bij de meting voor de mechanische parameters Bij de metingen van de periode worden enkele afwijkende waardes waargenomen (Figuur 94). Deze zijn een gevolg van overige ruis die zorgt dat er te snel een nieuwe oscillatie wordt gedetecteerd. Maar doordat een gemiddelde waarde wordt genomen is de invloed van deze afwijkingen niet zo groot. Periode - Time Current: 680 Mode: 2 Frequency: Periode (s) time (s) Figuur 94: De periode t 2 - t 1 bij de meting voor de mechanische parameters 66
 (6.")
76 Uit deze meting kwam volgend resultaat voor de relatieve demping en de eigenpulsatie: ω n = 282 rad s ζ = 0,045 Om uit de relatieve demping en de eigenfrequentie van het mechanische systeem de inertie en de viskeuze wrijving te halen, moet de constante k gekend zijn. ω n 2 = k J ζω n = 1 2 f v J (6.23) (6.24) Deze constante k kan zoals eerder vermeld gehaald worden uit de koppel hoek karakteristiek van de stappenmotor. Figuur 95: Linearisatie bij de werkelijke koppel-hoek karakteristiek Hieruit kan gemakkelijk de constante k worden gehaald. De koppel hoek karakteristiek is opgemeten voor een hybride stappenmotor met 50 poolparen, bij een nominale stroom van 680 ma. Dit is eveneens dezelfde stappenmotor die in de meetopstelling werd gebruikt voor het opmeten van de relatieve demping ζ en de eigenpulsatie ω n. Hierbij bedraagt de constante k: 6,26 Nm/rad. De inertie J en de viskeuze demping f v van het systeem bedragen nu: J = 7, kgm 2 f v = 2, Nm s/rad Om te controleren of deze waarde een correcte benadering is van de werkelijke waarde van de mechanische parameters kan de opgemeten inertie J vergeleken worden met een som van de grootste inerties in onze meetopstelling. Dit zijn de koppelmotor, de DC rem en de rotor van de stappenmotor zelf. Deze bedragen respectievelijk 214 gcm², 500 gcm² en 19 gcm² (zie de bijlage van De meetopstelling en de datasheet van de betreffende stappenmotor Datasheet KH39 series: 2-fase hybrid stepping motor:"). Samen komt dit neer op een som van 733 gcm² of 7, kgm² en dit ligt in de grootteorde van de opgemeten inertie. Daardoor kan worden besloten dat door middel van de stapresponsie van de tegen-emk het zeker mogelijk is betrouwbare gegevens over het totale mechanische systeem te verzamelen. 67
77 6.2. Het concept Uit het voorgaande werd bewezen dat het mogelijk is om met behulp van de tegen-emk de inertie en de viskeuze wrijving van het totale mechanische systeem te bepalen. Dit kan gebeuren door een automatische meetprocedure te doorlopen voor de stappenmotor in gebruik wordt gesteld. Met deze gegevens is het mogelijk om een soort van vooraf berekende sturing te gaan uitwerken. Zo kan op voorhand worden bepaald met welke stapfrequentie kan worden gestart. Dit door gebruik te maken van deze differentiaal vergelijking: T EM_gem = J dω dt + f vω (6.25) Daarbij wordt T EM_gem berekend aan de van het gemiddelde koppel dat bij een stap op de rotor inwerkt. Om het rekenwerk te vereenvoudigen moet tijdens de acceleratie van de stappenmotor de belastingshoek na iedere stap proberen gelijk te worden gehouden. Zo blijft het T EM_gem altijd gelijk en door in de berekeningen op te nemen dat bij het zetten van de volgende stap de stappenmotor net de gewenste snelheid heeft bereikt (Figuur 96). Figuur 96: Principe voor het koppel bij het accelereren van de motor In de differentiaal vergelijking kan dt gezien worden als de tijd tussen 1 stap en dit is afhankelijk van de stapfrequentie. In dit algoritme is het ook de bedoeling dat op het einde van de stap de stappenmotor net op de gewenste snelheid is gekomen daardoor is ω ook afhankelijk van de stapfrequentie. Daardoor wordt een vergelijking gecreëerd waarbij het gemiddeld koppel functie is van de stapfrequentie. T EM_gem = J 2π (f stap f vorige ) 4 poolparen stapmode 1 f stap + f v 2π f stap 4 poolparen stapmode (6.26) Doordat het gemiddeld beschikbare koppel van de stappenmotor gekend is omdat de belastingshoek constant wordt gehouden, kan telkens de volgende stapfrequentie worden berekend. Zo wordt een aansturing verkregen die met een constant koppel zal accelereren. Omdat in stilstand de belastingshoek veelal nul zal zijn kan er door zeer snel te stappen in microstepping naar de juiste belastingshoek worden gegaan. Dit is enkel nog maar een concept en werd nog niet in werkelijkheid geïmplementeerd. Dit concept dient om aan te tonen waarvoor de tegen-emk allemaal kan worden gebruikt. 68
78 7. Besluit 7.1. Realisatie Deze masterproef omvat 4 grote delen die in voorgaande hoofdstukken zijn besproken: (1) de karakterisatie van de stappenmotor en de gegenereerde tegen-emk, (2) de analyse van de tegen-emk onder verschillende externe omstandigheden, (3) toepassen van de gecapteerde tegen-emk in intelligente algoritmes, en (4) het programmeren van een algoritme in een microcontroller die een kleine demo-opstelling aanstuurt. Uit de behaalde resultaten mag worden afgeleid dat de beoogde doelstellingen zijn gerealiseerd: (1) Er is een geautomatiseerde meetopstelling met voorgeprogrammeerde testprocedures gebouwd die een willekeurige stappenmotor volledig en zelfstandig karakteriseert. (2) De analyse van de tegen-emk heeft geleid tot 3D karakteristieken die voorheen enkel in simulatie beschikbaar waren. Deze vernieuwende resultaten zijn beschreven in een IEEE publicatie die zal worden gepresenteerd op de IEEE Energy Conversion Congress and Exposition op 17 september in Phoenix, Arizona, VS. [4]. Verder werd uit de analyse de mogelijkheden van tegen-emk aangetoond en blijkt deze een schat van informatie te bevatten. (3) De gecapteerde tegen-emk is gebruikt in een intelligent algoritme dat stall kan detecteren. Dit algoritme ontwikkeld in Matlab/Simulink is met behulp van dspace in de praktijk uitgeprobeerd en getest. (4) Het ontwikkelde algoritme in Matlab/Simulink is in een vertaalslag omgezet naar bruikbare C code voor microcontrollers. Dit wordt in een demo-opstelling geïntegreerd en kan eenvoudig de werking van het algoritme aantonen Valorisatie ON Semiconductor is sinds jaren actief op de markt van intelligente stappenmotordriver ic s. Deze motordrivers onderscheiden zich door de hoge betrouwbaarheid omdat ze zeer weinig externe componenten nodig hebben. Daardoor zijn ze makkelijk te integreren tot compacte en goedkope oplossingen. Toepassingen hiervan zijn te vinden in auto s en in verschillende industriële machines zoals weefgetouwen, robots, PTZ camera s, enz... Een heel bijzondere serie motordrivers beschikt over de zogenaamde SLA of Speed and Load Angle uitgang. Op deze output pin van het ic wordt de door de stappenmotor gegenereerde tegen-emk ter beschikking gesteld. Met behulp van intelligente algoritmes die draaien op een bijkomende microcontroller kan gebaseerd hierop positie-, snelheid- en koppelcontrole uitgevoerd worden. Dit maakt het mogelijk om stappenmotoren closed-loop aan te sturen zonder bijkomende sensor in een externe terugkoppellus. Dit opent een nieuwe markt van high-end 3 motortoepassingen. De ontwikkelde algoritmes laten toe turnkey 4 oplossingen aan te bieden en verlagen zo de drempel om in de vrij versnipperde industriële markt ON Semi drivers te promoten. Vandaag zien wij een zeer sterke groei in de industriële motor markt met een CAGR 5 > 50% over de periode ON Semi verwacht mede door de nieuw ontwikkelde algoritmes een stijging van de omzet met een factor 2 jaar over jaar. 3 Verfijnde en kritische 4 Kant en klaar 5 Compound Annual Growth Rate : Het samengestelde jaarlijkse groeipercentage 69
79 7.3. Toekomstperspectieven Uit het onderzoek in het kader van deze masterproef is gebleken dat de door de stappenmotor gegenereerd tegen-emk heel wat waardevolle informatie bevat. Dit biedt nieuwe mogelijkheden. Gebaseerd op de onderzoeksresultaten kunnen bijkomende meer complex algoritmes ontwikkeld worden. In hoofdstuk 6 werd reeds aangetoond dat uit de stapresponsie van de tegen-emk gegevens over het mechanische systeem kunnen worden geëxtraheerd. Dit laat toe om met nieuwe algoritmes de stappenmotor (energie) efficiënter aan te sturen. Zo kan aan de hand van de tegen-emk de motorstroom worden geregeld zodat enkel het werkelijk nodige koppel wordt geleverd. Omgekeerd kan dit er voor zorgen dat een positionering met een stappenmotor sneller en efficiënter gebeurt. Terwijl deze algoritmes lopen kan nog steeds de tegen-emk worden geobserveerd. Bij plotse veranderingen zoals te hoog oplopende belasting kan onmiddellijk worden ingegrepen. Zo kan het verliezen van stappen worden gedetecteerd en zelfs voorkomen. De open-loop gedraagt zich als een servo-lus. De tegen-emk kan ook als rechtstreekse terugkoppeling worden gebruikt. Daardoor is het mogelijk een autospeed of auto-torque algoritme te ontwikkelen. In auto-speed zal de snelheid van de stappenmotor automatisch worden geregeld afhankelijk van de belasting. Bij auto-torque zal automatisch de stroom van de motor worden geregeld bij variërende belasting. Deze masterproef kan als basis dienen voor het verder uitwerken van een auto speed of auto torque algoritme. Al deze voorbeelden tonen aan dat het gebruik van de tegen-emk bijdraagt tot een efficiëntere en betrouwbaardere stappenmotor aansturing. Het is niet langer nodig een dure en fragiele encoder te gebruiken. Zo wordt er een goedkoop en robuust positioneringsysteem gecreëerd. 70
80 Literatuurlijst [1] F. Ir. D'hulster, De stappenmotor. Kortrijk, België: Howest, [2] Kortrijk, België: Howest, ch. 9, pp [3] P. Cox and B. Decock, ""Ouput contact for feedback in integrated circuit motor driver."," European patent EP A1, September 10, [4] T. De Ryck. (2010, Augustus) ON semiconductor. [Online]. D.PDF [5] Mathworks. (2011, Juni) MathWorks. [Online]. [6] S. Derammelaere, L. Carlier, and et. al., ""The oppertunities of two-phase hybrid stepping motor back EMF sampling"," in ECCE, Phoenix, Arizona, [7] ON semiconductor. (2009, Oktober) ONsemi. [Online]. D.PDF VI

81 Bijlagen De meetopstelling Om de stappenmotor en de tegen-emk te karakteriseren was een meetopstelling nodig. Deze meetopstelling werd reeds opgebouwd voor de aanvang van deze masterproef. Hierbij werd eerst goed nagedacht welke mogelijkheden deze opstelling moet bezitten. De mogelijkheden van de meetopstelling worden even kort opgelijst: Het aansturen van de stappenmotor Het aanleggen van een lastkoppel aan de stappenmotor Het opmeten van de tegen-emk Het opmeten van de werkelijk positie Kunnen remmen Het opmeten van de stroom in de spoelen Al deze functies van de meetopstelling worden verwezenlijkt door het inbouwen van de juiste hardware en de bijhorende software. Om een lastkoppel aan de stappenmotor te kunnen aanleggen wordt een DC koppelmotor in de opstelling voorzien. Voor de mogelijkheid tot remmen van de stappenmotor werd een elektromagnetische rem ingebouwd. Het opmeten van de werkelijke positie gebeurd door een encoder. Om deze hardware aan te sturen zijn er verschillende drivers en connectieborden nodig in de opstelling. De DC motor driver zorgt voor de aansturing van DC koppelmotor, hierin zit ook de aansturing van de EM rem. De steppermotor driver zorgt voor de juiste aansturing van de stappenmotor. De encoder is aangesloten op het bench connection board. Het current and voltage measureboard zorgt dat de stromen in de spoelen van de stappenmotor worden opgemeten. Al deze drivers en measureboarden krijgen hun commando s van het dspace I/O board. Ook via dit I/O board worden de verschillende ingangen binnengenomen. De voornaamste zijn de stroom, de encoderpulsen en de tegen-emk. Het dspace I/O board staat onder controle van de dspace controller. Deze controller bevindt zich in een power PC. Via een snelle communicatie bus staat deze power PC in verbinding met het werkstation waar de matlab/simulink software is geïnstalleerd. VII

82 Sommige eigenschappen van de software en hardware zijn belangrijk voor de opbouw van de meetprocedures en voor de analyse van de opgemeten grafieken. Ook met bepaalde hardwarematige beperkingen moet rekening worden gehouden zodat er geen verkeerde conclusies worden genomen. Daarom wordt op de voornaamste hardware en software nog eens dieper in gegaan. Hardware Overzicht van de belangrijkste parameters van de hardware: Encoder: Merk: Agilent Type: AEDA-3300 Series EM rem: Merk: Ogura Type: VBEH 6.0 DC koppelmotor: Merk: / Type: Serie De stepper motor driver: Merk: ON semiconductor Type: AMIS dspace controller: Merk: dspace Type: DS pulsen / omwenteling Maximale snelheid: 3000 RPM Statisch houdkoppel = 6,9 Nm Inertie = 500 gcm² Koppelconstante = 40,7 mnm/a Maximum koppel = 264 mnm Rotorinertie = 214 gcm² Maximum RMS spoelstroom = 3906 ma Mogelijke stapmodes: Fullstep, uncompensated halfstep, 1, 1, 1, 1, SLA pin voorzien: Transparente mode mogelijke. Speed en Load Angle ( tegen-emk van de stappenmotor) 6 digital encoder interfaces 16 A/D convertors 8 D/A convertors 32 bit parallel I/O De encoder De encoder gekozen voor deze opstelling is een 3 kanaals optische incrementele encoder. Door de kleine bouw en de hoge resolutie is deze encoder ideaal voor deze toepassing. Deze encoder heeft pulsen per omwenteling. Voor een stappenmotor van 200 fullsteps per omwenteling heeft deze encoder dus 100 pulsen per fullstep. Dit is ruim voldoende voor deze toepassing. Merk wel op dat met deze hoge nauwkeurigheid een snelheidsbeperking van 3000 rpm gepaard gaat (zie datasheet encoder). De DC koppelmotor en driver DC motoren hebben de eigenschap dat ze gemakkelijk in koppel aan te sturen zijn. Er is namelijk een rechtlijnig verband tussen koppel en stroom. Er kan dus een gewenst koppel worden aangelegd door de stroom door de motor te regelen. De waarde van de stroom wordt bepaald door het gewenste koppel met een constante te vermenigvuldigen. Deze constante werd bepaald door het eiken van de motor. Dit gebeurt door enkele gekende koppels aan de as van de motor aan te leggen en de stroom te meten waarbij de motor dit koppel gaat opheffen. VIII
83 In de datasheet van de DC motor wordt opgeven dat de koppelconstante rond de 40,7 mnm/a ligt. Nog enkele belangrijke eigenschappen van deze motor zijn de inertie van 214 gcm² voor de rotor en een maximum koppel van 264 mnm. De koppelmotor driver zal de stroom gaan regelen door middel van het aanleggen van een PWM spanning. Daardoor gaat een constant lastkoppel op het mechanische systeem inwerken. De EM rem De elektromagnetische rem in de opstelling bestaat uit een elektromagneet die wordt aangetrokken als er een spanning wordt opgezet, daardoor wordt een plaat tegen een vaste aanslag getrokken waardoor de as wordt vast gezet. De EM rem kan maximum een koppel van 5,1 Nm tegenhouden en bezit een inertie van 500 gcm². De stepper motor driver De stepper motor driver die gebruikt wordt voor de aansturing van de stappenmotor is ontwikkeld door ON semiconductor. AMIS Logic & Registers T R A N S L A T O R P W M P W M Stepper Motor MUX SLA M IX
84 Deze driver biedt de mogelijkheid om de stappenmotor in verschillende stapmodes aan te sturen. De mogelijke 1 stapmodes zijn fullstep, uncompensated halfstep en, 1, 1, 1, 1 microstepping. Het verschil tussen uncompensated halfstep en 1 microstepping is dat de spoelen van de 2 stappenmotor bij uncompensated halfstep altijd ofwel niet ofwel volledig bekrachtigd zijn. Bij 1 microstepping wordt net zoals bij de andere 2 microstepping stapmodes de resulterende vector van de stroom door de 2 spoelen op 100% van de nominaal ingestelde stroom gehouden. Daarom is er bij uncompensated halfstap tijdens de stap waar de spoelen samen zijn bekrachtigd tot 2 keer meer koppel beschikbaar dan bij 1 microstepping in 2 diezelfde stappositie. Een nadeel hiervan is dat er niet in elke stap eenzelfde koppel beschikbaar is waardoor er een minder vloeiende beweging wordt gemaakt. Naast de mogelijkheid voor het aansturen van de stappenmotor in verschillende stapmodes heeft deze driver ook een SLA pin (Speed and Load Angle). Op deze output kan tijdens de nuldoorgang van de stroom in de spoel de tegen-emk worden uitgelezen. Voordat effectief de tegen EMK kan worden gemeten moet er eerst nog een recirculatie stroom en een spanningstransiënt uitgewerkt zijn. Daarom wordt de tegen-emk gesampled en vastgehouden net voor het zetten van de volgende stap. De stappenmotor driver biedt echter ook nog de mogelijkheid om tijdens de volledige nuldoorgang van de stroom de tegen-emk binnen te lezen. Dit kan door de SLAT variabele van de driver op 1 te plaatsen. Dan is de tegen-emk in transparante mode beschikbaar, dit wil zeggen dat ook de recirculatie van de stroom en de spanningstransiënt zichtbaar zijn op de SLA pin. Echter tussen het einde van de recirculatie van de stroom en het wegebben van de spanningstransiënt kan bij lage toerentallen nog een relatief lange tijd zitten. Gedurende deze tijd kan het bijvoorbeeld mogelijk zijn extra informatie uit de tegen EMK over de beweging van de rotor van de stappenmotor te weten te komen. Meer informatie over deze stappenmotor driver kan worden teruggevonden in de datasheet van de AMIS [5] X
85 dspace controller De dspace controller maakt het mogelijk om realtime algoritmes uit te testen en metingen op te doen. Via matlab kan een Simulink model in de controller worden geladen. De controller zal de logica van dit model realtime gaan uitvoeren en hierbij de gedefinieerde I/O gaan uitlezen en aansturen. Via het dspace I/O board kunnen verschillende analoge signalen met de verschillende D/A en A/D convertors worden aangestuurd of gemeten. Het I/O board biedt ook de mogelijkheid verschillende encoders uit te lezen en enkele digitale I/O aan te sturen. Op die manier wordt dspace gebruikt om de totale meetopstelling onder controle te nemen en is het flexibel om verschillende algoritmes uit te testen. dspace zorgt ook voor de brug met de PC zodat de meetdata gemakkelijk kan worden verwerkt door de matlab software. De dspace controller kan gezien worden als een controller die volgens een vastgelegde cyclustijd een bepaalde logica zal gaan uitvoeren. Doordat deze cyclustijd een vaste waarde is en de tijd is waarin de volledige logica moet doorlopen worden, heeft dit zijn beperkingen in het genereren van een pulstrein aan een bepaalde frequentie. Dit wordt duidelijk aan de hand van een rekenvoorbeeld: Stel: Cyclustijd = 20 µs Frequentie = 2000 Hz Periode = 500 µs Eerstvolgende frequentie die de dspace controller kan genereren is: Volgende frequentie = 1 = 2083,33 Hz Bij de pull-out koppel meetprocedure moet er geleidelijk aan kunnen worden versnelt naar een bepaalde frequentie. Doordat hier nu plots 83 Hz sneller moet worden gedraaid kan het zijn dat de stappenmotor die sprong niet meer kan halen en stappen gaat verliezen. Dit leidt er toe dat hogere frequenties niet worden gehaald. Terwijl de grens van de pull out koppel karakteristiek zonder deze beperking nog niet zou worden bereikt. Maar ook bij andere meetprocedures kan dit leiden tot problemen. Stel er wordt frequentie van 2000 Hz, 2040 Hz of 2080 Hz gevraagd in werkelijkheid zal er telkens effectief maar 2000 Hz aangelegd worden. Wat zal leiden tot dubbele metingen en trapvorming in de grafieken. Hieruit wordt besloten dat de stapfrequentie slechts in discrete stappen verhoogd kan worden. XI
86 Software Matlab is een krachtig rekenprogramma die het mogelijk maakt gemakkelijk data te verwerken of complexe berekeningen uit te voeren. Simulink biedt de mogelijkheid controle algoritmes en signaal verwerkingsmodellen op te bouwen. Simulink is geïntegreerd in Matlab en dit zorgt voor het gemakkelijk uitwisselen van data tussen beide waardoor dit een ideale omgeving is om prototype algoritmes te bouwen en uit te testen. De mlib commando s van dspace zorgen dan op hun beurt voor de koppeling van de hardware aan de Matlab/Simulink software en biedt de mogelijkheid om realtime data uit de algoritmes te halen. Daardoor is het de ideale software om in deze toepassing te gebruiken. Matlab Matlab is een veelzijdig wiskundig programma waarin het mogelijk is complexe berekeningen te doen. Met behulp van de m-files kunnen er meetprocedures worden opgemaakt. M-files zijn bestanden waarin de code regels worden bijgehouden. De data die wordt verzameld in deze meetprocedures kan in matlab in grafieken worden verwerkt. Deze data kan dan worden opgeslagen om later gemakkelijk opnieuw op te vragen. Simulink Simulink is heel interessant om algoritmes in op te bouwen. Deze algoritmes kunnen via matlab in de dspace controller worden ingeladen en zo gemakkelijk worden uitgetest. mlib De mlib commando s maken het mogelijk om uit de meetprocedures opgemaakt in de m-files van matlab, realtime data te schrijven en te lezen uit de dspace controller waarop de simulink algoritmes actief zijn. Het mlib protocol voorziet ook de mogelijkheid om in een bepaald tijdsinterval een aantal samples van verschillende variabelen te bufferen en binnen te nemen in matlab. Deze functie is handig wanneer tijdskritische data met elkaar moet worden vergeleken. XII
87 Simulink model in dspace In dit onderdeel komt het Simulink model die in de dspace controller wordt geladen aan bod. Dit model gaat afhankelijk van de mlib commando s en de inputs van het dspace I/O board, de outputs van de meetopstelling gaan aansturen. Eerst wordt een algemeen overzicht van dit model gegeven daarna wordt ieder onderdeel in detail verduidelijkt. Het algemeen model Op de volgende pagina staat het overzicht van dit model in Simulink. In dit model kunnen volgende grote onderdelen worden terug gevonden: De stappenmotor beveiliging (geel) De positie informatie (grijs) De tegen-emk nabewerking (grijs) De acceleratie eenheid (oranje) De dspace I/O s (blauw) Het stall detectie algoritme (groen) De stall detectie interface (oranje) De NXT puls generator (oranje) Mechanische parameters uit stapresponsie (groen) Hierbij zijn de oranje onderdelen deel van de aansturing van stappenmotor driver. Het gele onderdeel is ingevoerd voor de beveiliging van de stappenmotor. De blauwe onderdelen zijn de blokken die de verbinding leggen met de dspace I/O s. De groene delen zijn de bovenliggende ontwikkelde algoritmes. De grijze onderdelen gaan de opgemeten data verwerken naar bruikbare signalen. XIII
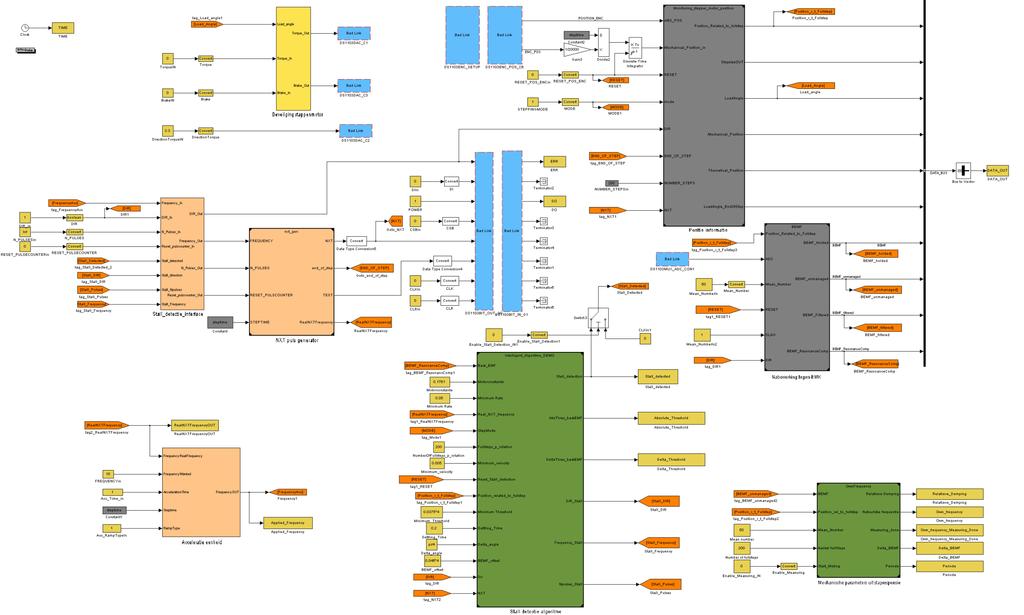
88 XIV
89 Positie informatie In dit onderdeel wordt de load angle ( belastingshoek) berekend uit de waarde van de werkelijke en de theoretische positie (positie van de stroomvector). De theoretische positie wordt bijgehouden door bij iedere puls (NXT) een keer de theoretische stapgrootte er bij te tellen. Daarnaast is er ook nog de werkelijk stapgrootte (stepsize) die aangeeft wat de werkelijke verplaatsing in de voorbije stap was. De belangrijkste variabele in dit onderdeel is de positie tov fullstep (position related to fullstep) deze variabele houdt bij op welke positie de stappenmotor zich bevindt tussen twee fullsteps. Als de stapmode ingesteld staat op ¼ zal deze variabele bij iedere stap één bijtellen en resetten op 4. Zo wordt de waarde repetitief 0,1,2,3,0,. Het belangrijkste van deze variabele is dat telkens de stroom in een fase nul wordt ook deze variabele nul is. Zo geeft deze variabele aan wanneer de tegen-emk gemeten wordt, waarde is 0, en wanneer deze beschikbaar is, waarde is 1. XV
90 XVI
91 NEXT puls generator In dit onderdeel wordt de pulstrein voor de stappenmotor drive opgemaakt afhankelijk van de gewenste stapfrequentie. Deze pulstrein wordt via de variabele NXT naar buiten gebracht. De variabele RealNXTfrequency heeft de werkelijk frequentie terug van NXT variabele. Omdat de gevraagde stapfrequentie niet altijd kan worden gegenereerd door de cyclustijd van de dspace controller. XVII
92 XVIII
93 Tegen-EMK nabewerking In dit onderdeel wordt de tegen-emk gefilterd en bewerkt op verschillende manieren. Uit dit blok komen er 4 verschillende tegen-emk s: De onbehandelde tegen-emk, de gefilterde tegen-emk, de vastgehouden tegen- EMK en de resonantie compensatie tegen-emk. Deze laatste is de tegen-emk die wordt gebruikt in het stall detectie algoritme zoals beschreven in de tekst (Nabewerking tegen-emk). XIX
94 XX
95 Het stall detectie algoritme In dit onderdeel wordt het stall detectie algoritme weergegeven zoals het werkelijk in het Simulink model is geïmplementeerd. XXI
96 XXII
97 De stall detectie interface Dit onderdeel maakt het mogelijk om het stall detectie algoritme de controle over de stappenmotor te geven indien er een stall gedetecteerd wordt. XXIII
98 Beveiliging stappenmotor Om het probleem die zich voordoet bij het doorschieten van de stappenmotor te verhelpen wordt een beveiliging in het model ingevoerd. Voor de beveiliging kan worden ingevoerd moeten er eerst inzicht in het probleem verkregen worden om daarna met een oplossing naar voor te komen. Schetsen van het probleem Bij het aanleggen van een tegenkoppel, door middel van de DC motor, wordt het koppel op een bepaald moment groter dan het houdkoppel zodat de stappenmotor de controle over de rotor verliest. Op dit moment ligt nog steeds een tegenkoppel aan die kan zorgen dat de stappenmotor sterk gaat versnellen in de tegengestelde richting. De hoge snelheden induceren in de stator van de stappenmotor hoge tegen EMK s. Stel nu dat één van de fasen in de nuldoorgang zitdan gaat de motor driver de tegen EMK gaan samplen. Daardoor sluit de motor driver thyristor 4 en zijn de 3 overige open. Over thyristor 1 staat nu de bron spanning plus de tegen EMK. Als de snelheid te hoog wordt, wordt de back EMF te groot waardoor deze thyristor gaat doorslaan en de motor driver stuk gaat. XXIV
99 Oplossing probleem Om dit probleem en dus het fataal beschadigen van motor driver te vermijden kan in het Simulink model een veiligheidselement voorzien worden die waakt over de stappenmotor. Zo kan er op tijd worden ingegrepen bij dit het probleem. Door gebruik te maken van de load angle die reeds besproken is kan gecontroleerd worden of de stappenmotor de belasting nog aan kan. Indien de load angle boven een bepaalde waarde komt zal het veiligheidselement ingrijpen, dit door de DC motor uit te schakelen en de EM rem te activeren. Enkel wanneer vanuit matlab het koppelcommando terug nul is, zal de beveiliging de stappenmotor terug vrijgeven en de EM rem terug lossen. Om dat het nog mogelijk zou zijn om met de koppelmotor de meetopstelling aan te drijven voor in sommige metingen wordt het koppel met een maximum begrensd. Zolang het koppel onder deze grens is wordt niet naar de load angle gekeken. Dit maximum zorgt er voor dat de koppelmotor nog steeds de opstelling kan aandrijven en dat de snelheid niet te hoog kan oplopen zodat het beschadigen van de motor driver wordt vermeden. XXV
100 XXVI
101 Acceleratie eenheid Om in de overeenkomend meetprocedure verschillende snelheidsprofielen te kunnen aanleggen diende een acceleratie eenheid te worden opgebouwd die dit mogelijk maakt. XXVII
102 XXVIII
103 Mechanische parameters uit stapresponsie In dit onderdeel is het algoritme voor het opmeten van de mechanische parameters uit de tegen-emk uitgewerkt zoals in de tekst is uitgelegd. XXIX
104 XXX
105 XXXI
106 European patent application: EP A1 XXXII

107 XXXIII

108 XXXIV

109 XXXV
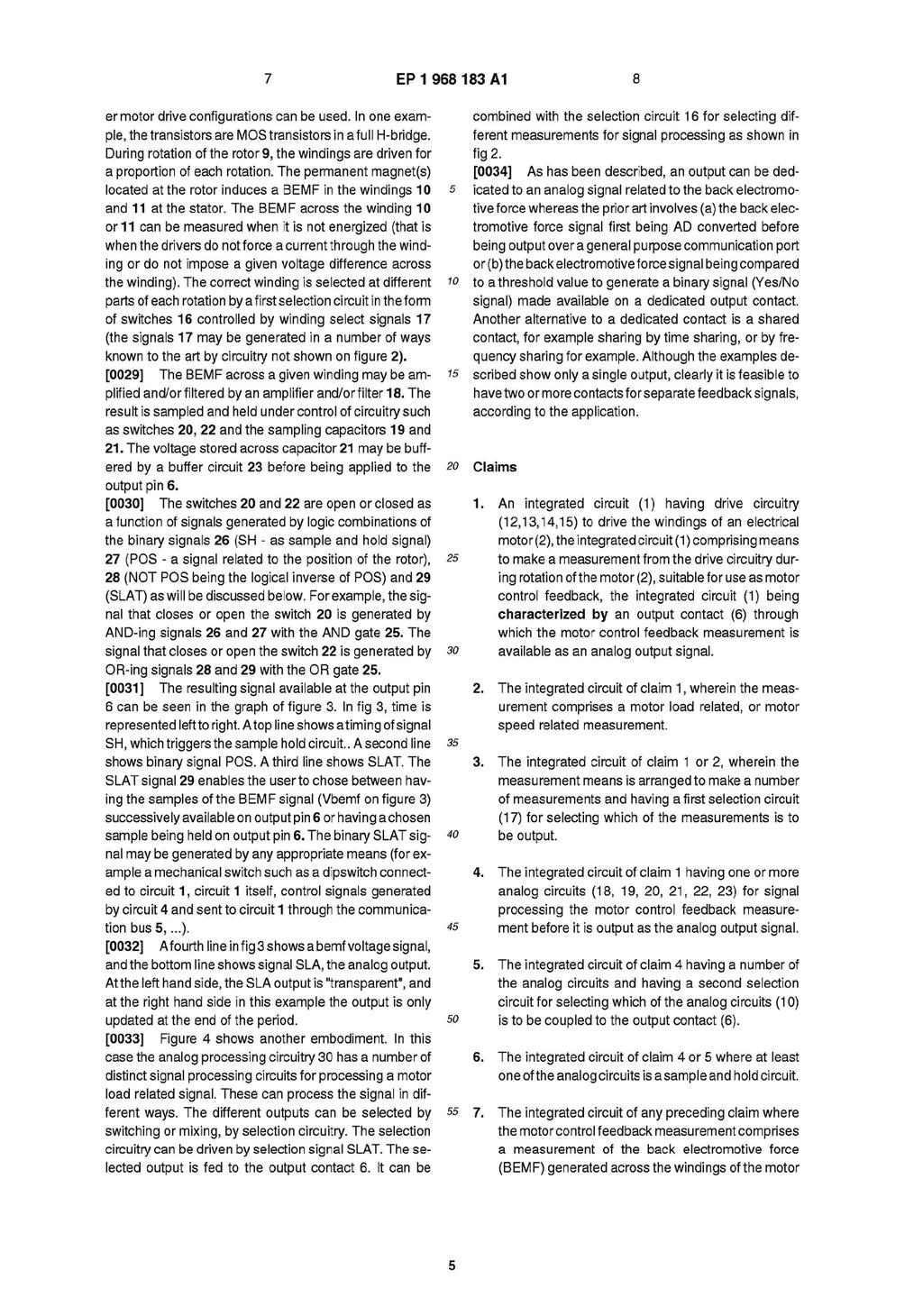
110 XXXVI
111 XXXVII
112 XXXVIII
113 XXXIX
114 XL
115 XLI
116 XLII
117 XLIII
118 XLIV

119 Datasheet KH39 series: 2-fase hybrid stepping motor: XLV

120 XLVI
Vermogen Elektronica : Stappenmotor
 Naam : Sven Martens / Rob Nijs Nr : 07 /09 Datum : 8/12/04 Vermogen Elektronica : Stappenmotor 1 1 De stappenmotor De stator bevat een aantal spoelen en om de rotor te laten draaien moeten deze spoelen
Naam : Sven Martens / Rob Nijs Nr : 07 /09 Datum : 8/12/04 Vermogen Elektronica : Stappenmotor 1 1 De stappenmotor De stator bevat een aantal spoelen en om de rotor te laten draaien moeten deze spoelen
De stappenmotor 1 Inleiding
 De stappenmotor 1 Inleiding Stappenmotoren zijn in het bijzonder geschikt om door een digitale besturing aangestuurd te worden, dat wil zeggen aansturing door middel van digitale signalen, bijvoorbeeld
De stappenmotor 1 Inleiding Stappenmotoren zijn in het bijzonder geschikt om door een digitale besturing aangestuurd te worden, dat wil zeggen aansturing door middel van digitale signalen, bijvoorbeeld
PROJECT 1: Kinematics of a four-bar mechanism
 KINEMATICA EN DYNAMICA VAN MECHANISMEN PROJECT 1: Kinematics of a four-bar mechanism Lien De Dijn en Celine Carbonez 3 e bachelor in de Ingenieurswetenschappen: Werktuigkunde-Elektrotechniek Prof. Dr.
KINEMATICA EN DYNAMICA VAN MECHANISMEN PROJECT 1: Kinematics of a four-bar mechanism Lien De Dijn en Celine Carbonez 3 e bachelor in de Ingenieurswetenschappen: Werktuigkunde-Elektrotechniek Prof. Dr.
ELEKTRICITEIT-Stappenmotoren
 ELEKTRICITEIT-Stappenmotoren 1 Stappenmotoren...1 1.1 Inleiding....1 1.2 Wat is nu juist een stappenmotor?... 2 1.3 Waar vinden we stappenmotoren?... 3 1.4 Soorten stappenmotoren?... 3 1.5 Permanente magneet
ELEKTRICITEIT-Stappenmotoren 1 Stappenmotoren...1 1.1 Inleiding....1 1.2 Wat is nu juist een stappenmotor?... 2 1.3 Waar vinden we stappenmotoren?... 3 1.4 Soorten stappenmotoren?... 3 1.5 Permanente magneet
Studenten van de elektronica afdeling van het VTI testen de vorig jaar gebouwde Savonius windturbine uit.
 Studenten van de elektronica afdeling van het VTI testen de vorig jaar gebouwde Savonius windturbine uit. VTI Aalst: een school van techniek en toegepaste wetenschappen. De Beer Gino, http://users.telenet.be/laboee/
Studenten van de elektronica afdeling van het VTI testen de vorig jaar gebouwde Savonius windturbine uit. VTI Aalst: een school van techniek en toegepaste wetenschappen. De Beer Gino, http://users.telenet.be/laboee/
TENTAMEN ELEKTROMAGNETISME
 TENTMEN ELEKTROMGNETISME 23 juni 2003, 14.00 17.00 uur Dit tentamen bestaat uit 4 opgaven. OPGVE 1 Gegeven is een zeer dunne draad B waarop zch een elektrische lading Q bevindt die homogeen over de lengte
TENTMEN ELEKTROMGNETISME 23 juni 2003, 14.00 17.00 uur Dit tentamen bestaat uit 4 opgaven. OPGVE 1 Gegeven is een zeer dunne draad B waarop zch een elektrische lading Q bevindt die homogeen over de lengte
http://techniline.sirris.be/s/p.exe/wservice=wo/webextra/prg/olarticleprint?vwebse...
 Page 1 of 5 Techniline v3 27-08-2010 Mechatronics Machines verbruiken minder energie door slimme keuze elektrische aandrijving (27-08-2010) Nr. 0 Ecologische en economische motieven, zoals nieuwe machinenormen
Page 1 of 5 Techniline v3 27-08-2010 Mechatronics Machines verbruiken minder energie door slimme keuze elektrische aandrijving (27-08-2010) Nr. 0 Ecologische en economische motieven, zoals nieuwe machinenormen
Voorwoord. "Anyone who has never made a mistake has never tried anything new." Albert Einstein
 "Anyone who has never made a mistake has never tried anything new." Albert Einstein Voorwoord Een masterproef is de kroon op het werk van de academische opleiding. Als student dien je nu de opgedane kennis
"Anyone who has never made a mistake has never tried anything new." Albert Einstein Voorwoord Een masterproef is de kroon op het werk van de academische opleiding. Als student dien je nu de opgedane kennis
Deel 8: stappenmotoren en interrupts
 Deel 8: stappenmotoren en interrupts Stappenmotor Kan hoek van as instellen zonder een gesloten feedbacksysteem. Het is een simpel en precies open loop systeem. Werkt met discrete stappen, dus schokkerig
Deel 8: stappenmotoren en interrupts Stappenmotor Kan hoek van as instellen zonder een gesloten feedbacksysteem. Het is een simpel en precies open loop systeem. Werkt met discrete stappen, dus schokkerig
Masterproef Intelligente Stappenmotor Algoritmes
 Masterproef Intelligente Stappenmotor Algoritmes Studiegebied Industriële wetenschappen en technologie Opleiding Master in de industriële wetenschappen: elektrotechniek Afstudeerrichting Elektrotechniek
Masterproef Intelligente Stappenmotor Algoritmes Studiegebied Industriële wetenschappen en technologie Opleiding Master in de industriële wetenschappen: elektrotechniek Afstudeerrichting Elektrotechniek
Beschrijving 2. Plaatsing componenten. 2-polige stelmotor. A = Luchtstroom. 1. Aansluitingen 2. Huis 3. Permanente magneet 4. Anker 5.
 Beschrijving 3 4 5 Plaatsing componenten. ansluitingen. Huis 3. Permanente magneet 4. nker 5. Klep = Luchtstroom -polige stelmotor Universele informatie Sensoren en stelelementen 6 V 8 4 8 6 4 = Uit; =
Beschrijving 3 4 5 Plaatsing componenten. ansluitingen. Huis 3. Permanente magneet 4. nker 5. Klep = Luchtstroom -polige stelmotor Universele informatie Sensoren en stelelementen 6 V 8 4 8 6 4 = Uit; =
Case Simulink. Team name: SolarMatic. Group:AM13
 Team name: SolarMatic Group:AM13 Team members: Thomas Deliens Michaël Op de Beeck Renaud Peeters Tom Salens Jens Sneyers Karel Winderickx Case Simulink Weerstandswaarde waarbij het paneel een maximum vermogen
Team name: SolarMatic Group:AM13 Team members: Thomas Deliens Michaël Op de Beeck Renaud Peeters Tom Salens Jens Sneyers Karel Winderickx Case Simulink Weerstandswaarde waarbij het paneel een maximum vermogen
WINDENERGIE : STROMINGSLEER
 INHOUD: Drag-kracht en lift-kracht Krachten op roterende wiek De pitch hoek en de angle of attack Krachtwerking De rotorefficiëntie C P Karakteristieken van een turbine Beschouwen we een HAWT (horizontal
INHOUD: Drag-kracht en lift-kracht Krachten op roterende wiek De pitch hoek en de angle of attack Krachtwerking De rotorefficiëntie C P Karakteristieken van een turbine Beschouwen we een HAWT (horizontal
Verschillende normen voor de bepaling van het rendement van een inductiemachine
 Verschillende normen voor de bepaling van het rendement van een inductiemachine Focus Voor elke motor die op de markt gebracht wordt, dienen enkele kengetallen te worden gegeven als maat voor de performantie
Verschillende normen voor de bepaling van het rendement van een inductiemachine Focus Voor elke motor die op de markt gebracht wordt, dienen enkele kengetallen te worden gegeven als maat voor de performantie
SYNCHRONE MOTOREN I. Claesen / R. Slechten
 ELEKTRICITEIT THEORIE SYNCHRONE MOTOREN I. Claesen / R. Slechten versie:30/05/2005 1 SYNCHRONE MOTOREN...2 1.1 Bepaling...2 1.2 Samenstelling...2 1.3 Werkingsprincipe...2 1.4 Werkingsprincipe synchrone
ELEKTRICITEIT THEORIE SYNCHRONE MOTOREN I. Claesen / R. Slechten versie:30/05/2005 1 SYNCHRONE MOTOREN...2 1.1 Bepaling...2 1.2 Samenstelling...2 1.3 Werkingsprincipe...2 1.4 Werkingsprincipe synchrone
Analyse van de Futaba S3003 dc motor
 Analyse van de Futaba S3003 dc motor Door Ali Kaichouhi In dit artikel wordt de RF-020-TH dc motor wat nader ondergezocht. Het eerste deel bevat informatie over de constructie en de werking van deze motor.
Analyse van de Futaba S3003 dc motor Door Ali Kaichouhi In dit artikel wordt de RF-020-TH dc motor wat nader ondergezocht. Het eerste deel bevat informatie over de constructie en de werking van deze motor.
Zilvertron B.V. Achterwetering 7b 2871 RK Schoonhoven 0182-305045 www.zilvertron.com info@zilvertron.com. René Jansen
 Missie : Het leveren en creëren van Mechatronica oplossingen in de business to business markt, zowel in het LOW-TECH als in het HIGH-TECH bereik van klein aandrijftechniek. Zilvertron B.V. Achterwetering
Missie : Het leveren en creëren van Mechatronica oplossingen in de business to business markt, zowel in het LOW-TECH als in het HIGH-TECH bereik van klein aandrijftechniek. Zilvertron B.V. Achterwetering
De bepaling van de positie van een. onderwatervoertuig (inleiding)
") De bepaling van de positie van een onderwatervoertuig (inleiding) juli 2006 Bepaling positie van een onderwatervoertuig. Inleiding: Het volgen van onderwatervoertuigen (submersibles, ROV s etc) was in
De bepaling van de positie van een onderwatervoertuig (inleiding) juli 2006 Bepaling positie van een onderwatervoertuig. Inleiding: Het volgen van onderwatervoertuigen (submersibles, ROV s etc) was in
Meting zonnepaneel. Voorbeeld berekening diodefactor: ( ) Als voorbeeld wordt deze formule uitgewerkt bij een spanning van 7 V en 0,76 A:
 Als voorbeeld wordt deze formule uitgewerkt bij een spanning van 7 V en 0,76 A:") Meting zonnepaneel Om de beste overbrengingsverhouding te berekenen, moet de diodefactor van het zonnepaneel gekend zijn. Deze wordt bepaald door het zonnepaneel te schakelen aan een weerstand. Een multimeter
Meting zonnepaneel Om de beste overbrengingsverhouding te berekenen, moet de diodefactor van het zonnepaneel gekend zijn. Deze wordt bepaald door het zonnepaneel te schakelen aan een weerstand. Een multimeter
AC-inductiemotoren en BLDC-motoren lijken erg op elkaar. Het grootste verschil ligt in de constructie van de rotor.
 Pneumatische pompen vormen al vele jaren de steunpilaar van de verfcirculatiewereld en daar zijn goede redenen voor. Ze zijn eenvoudig, betrouwbaar en dankzij de langzame heenen-weer gaande beweging beschadigen
Pneumatische pompen vormen al vele jaren de steunpilaar van de verfcirculatiewereld en daar zijn goede redenen voor. Ze zijn eenvoudig, betrouwbaar en dankzij de langzame heenen-weer gaande beweging beschadigen
Arbeid, vermogen en rendement
 Arbeid, vermogen en rendement Formules Arbeid Arbeid is een maat van het werk dat geleverd wordt door een krachtbron om een voorwerp te verplaatsen. Als een kracht een verplaatsing tot gevolg heeft dan
Arbeid, vermogen en rendement Formules Arbeid Arbeid is een maat van het werk dat geleverd wordt door een krachtbron om een voorwerp te verplaatsen. Als een kracht een verplaatsing tot gevolg heeft dan
Case Simulink EE4- Building a SSV - Team PM1 21 maart 2014
 Case Simulink EE4- Building a SSV - Team PM1 21 maart 2014 Inhoudsopgave Inhoudsopgave... 1 Figurenlijst... 1 Inleiding... 2 Gedrag van het zonnepaneel gekoppeld aan een weerstand... 2 Gedrag van de DC-motor
Case Simulink EE4- Building a SSV - Team PM1 21 maart 2014 Inhoudsopgave Inhoudsopgave... 1 Figurenlijst... 1 Inleiding... 2 Gedrag van het zonnepaneel gekoppeld aan een weerstand... 2 Gedrag van de DC-motor
Rendement bij inductiemachines: motor versus generator
 Rendement bij inductiemachines: motor versus generator Focus Inductiemachines vinden meestal hun toepassing als motoren, hoewel er een groeiende markt is voor kleine elektrische generatoren (bijvoorbeeld
Rendement bij inductiemachines: motor versus generator Focus Inductiemachines vinden meestal hun toepassing als motoren, hoewel er een groeiende markt is voor kleine elektrische generatoren (bijvoorbeeld
1. Langere vraag over de theorie
 . Langere vraag over de theorie. Bereken het magneetveld dat veroorzaakt wordt door een lange, cilindervormige stroomvoerende geleider met straal R en stroom (uniforme stroomdichtheid) en dit zowel binnen
. Langere vraag over de theorie. Bereken het magneetveld dat veroorzaakt wordt door een lange, cilindervormige stroomvoerende geleider met straal R en stroom (uniforme stroomdichtheid) en dit zowel binnen
Magnetische toepassingen in de motorvoertuigentechniek (3)
") Magnetische toepassingen in de motorvoertuigentechniek (3) E. Gernaat, ISBN 978-90-808907-3-2 1 Theorie wisselspanning 1.1 De inductieve spoelweerstand (X L ) Wanneer we een spoel op een wisselspanning
Magnetische toepassingen in de motorvoertuigentechniek (3) E. Gernaat, ISBN 978-90-808907-3-2 1 Theorie wisselspanning 1.1 De inductieve spoelweerstand (X L ) Wanneer we een spoel op een wisselspanning
Case Simulink. Team PM 12: Joris Brankaer Arne Vanderlinden Jens Noë Carl Uydens Tom Vranckx Ben Eisenberg. 2e bac groep 11
 Case Simulink Team PM 12: Joris Brankaer Arne Vanderlinden Jens Noë Carl Uydens Tom Vranckx Ben Eisenberg 2e bac groep 11 22 maart 2013 Inleiding In deze Simulink case wordt het gedrag van onze SSV gesimuleerd
Case Simulink Team PM 12: Joris Brankaer Arne Vanderlinden Jens Noë Carl Uydens Tom Vranckx Ben Eisenberg 2e bac groep 11 22 maart 2013 Inleiding In deze Simulink case wordt het gedrag van onze SSV gesimuleerd
Deze Informatie is gratis en mag op geen enkele wijze tegen betaling aangeboden worden. Vraag 1
 Vraag 1 Twee stenen van op dezelfde hoogte horizontaal weggeworpen in het punt A: steen 1 met een snelheid v 1 en steen 2 met snelheid v 2 Steen 1 komt neer op een afstand x 1 van het punt O en steen 2
Vraag 1 Twee stenen van op dezelfde hoogte horizontaal weggeworpen in het punt A: steen 1 met een snelheid v 1 en steen 2 met snelheid v 2 Steen 1 komt neer op een afstand x 1 van het punt O en steen 2
Opgaven elektrische machines ACE 2013
 Opgaven elektrische machines ACE 2013 1a. Geef de relatie tussen koppel en stroom bij een gelijkstroommachine 1b. Geef de relatie tussen hoeksnelheid en geïnduceerde spanning van een gelijkstroommachine
Opgaven elektrische machines ACE 2013 1a. Geef de relatie tussen koppel en stroom bij een gelijkstroommachine 1b. Geef de relatie tussen hoeksnelheid en geïnduceerde spanning van een gelijkstroommachine
Magnetische toepassingen in de motorvoertuigentechniek (2)
") Magnetische toepassingen in de motorvoertuigentechniek () E. Gernaat, ISBN 97-9-97-3- 1 Inductiespanning 1.1 Introductie Eén van de belangrijkste ontdekkingen op het gebied van de elektriciteit was het
Magnetische toepassingen in de motorvoertuigentechniek () E. Gernaat, ISBN 97-9-97-3- 1 Inductiespanning 1.1 Introductie Eén van de belangrijkste ontdekkingen op het gebied van de elektriciteit was het
Katholieke Hogeschool Kempen Campus HIKempen Geel Departement Industrieel Ingenieur en Biotechniek 4 EM ET. Labo Elektrotechniek
 Katholieke Hogeschool Kempen Campus HIKempen Geel Departement Industrieel Ingenieur en Biotechniek 4 EM ET Marijn Roels 3 November 2005 Labo Elektrotechniek Driefasige ASM C A M P U S Geel Docent: Segers
Katholieke Hogeschool Kempen Campus HIKempen Geel Departement Industrieel Ingenieur en Biotechniek 4 EM ET Marijn Roels 3 November 2005 Labo Elektrotechniek Driefasige ASM C A M P U S Geel Docent: Segers
Trillingen en geluid wiskundig
 Trillingen en geluid wiskundig 1 De sinus van een hoek 2 Radialen 3 Uitwijking van een harmonische trilling 4 Macht en logaritme 5 Geluidsniveau en amplitude 1 De sinus van een hoek Sinus van een hoek
Trillingen en geluid wiskundig 1 De sinus van een hoek 2 Radialen 3 Uitwijking van een harmonische trilling 4 Macht en logaritme 5 Geluidsniveau en amplitude 1 De sinus van een hoek Sinus van een hoek
Informatiebundel ADuC832 Motor interface bord MGM/[dp]
![Informatiebundel ADuC832 Motor interface bord MGM/[dp]](/thumbs/61/45548059.jpg "Informatiebundel ADuC832 Motor interface bord MGM/[dp]") Het ADuC832 Motor interface bord. Het ADuC832V2.0 motor interface bord heeft als doel: Een DC motor en een stappenmotor, die op het motor interface bord gemonteerd zijn, te kunnen aansturen met een ADuCV2.0/V1.1
Het ADuC832 Motor interface bord. Het ADuC832V2.0 motor interface bord heeft als doel: Een DC motor en een stappenmotor, die op het motor interface bord gemonteerd zijn, te kunnen aansturen met een ADuCV2.0/V1.1
WINDENERGIE : GENERATOREN
 INHOUD: Inleiding Overzicht types generatoren Turbine met asynchrone generator Turbine met asynchrone generator met grote slip Turbine met dubbel gevoede inductiemachine Turbine met synchrone generator
INHOUD: Inleiding Overzicht types generatoren Turbine met asynchrone generator Turbine met asynchrone generator met grote slip Turbine met dubbel gevoede inductiemachine Turbine met synchrone generator
Samenvatting Natuurkunde Samenvatting 4 Hoofdstuk 4 Trillingen en cirkelbewegingen
 Samenvatting Natuurkunde Samenvatting 4 Hoofdstuk 4 rillingen en cirkelbewegingen Samenvatting door Daphne 1607 woorden 15 maart 2019 0 keer beoordeeld Vak Methode Natuurkunde Natuurkunde overal Samenvatting
Samenvatting Natuurkunde Samenvatting 4 Hoofdstuk 4 rillingen en cirkelbewegingen Samenvatting door Daphne 1607 woorden 15 maart 2019 0 keer beoordeeld Vak Methode Natuurkunde Natuurkunde overal Samenvatting
Changing winds. Windmills.
 Changing winds Windmills. Changing winds 10Kw Changing winds is de merknaam van windmolens gebouwd door: metaalconstructie Van Vlaenderen. Onze windmolens zijn er van superieure kwaliteit. We maken enkel
Changing winds Windmills. Changing winds 10Kw Changing winds is de merknaam van windmolens gebouwd door: metaalconstructie Van Vlaenderen. Onze windmolens zijn er van superieure kwaliteit. We maken enkel
Ijkingstoets industrieel ingenieur UGent/VUB, september 2015
 IJkingstoets 4 september 05 - reeks - p. /0 Ijkingstoets industrieel ingenieur UGent/VUB, september 05 Oefening De evolutie van een bepaalde radioactieve stof in de tijd volgt het wiskundig model N (t)
IJkingstoets 4 september 05 - reeks - p. /0 Ijkingstoets industrieel ingenieur UGent/VUB, september 05 Oefening De evolutie van een bepaalde radioactieve stof in de tijd volgt het wiskundig model N (t)
TENTAMEN ELEKTROMAGNETISME (3D020)
") TENTAMEN ELEKTROMAGNETISME (3D020) 10 augustus 1999, 14.00 17.00 uur UITWERKING 1 a) De totale weerstand in de keten wor gegeven door de som van de weerstanden van 1 Ω, 5Ω, de parallelschakeling van 30
TENTAMEN ELEKTROMAGNETISME (3D020) 10 augustus 1999, 14.00 17.00 uur UITWERKING 1 a) De totale weerstand in de keten wor gegeven door de som van de weerstanden van 1 Ω, 5Ω, de parallelschakeling van 30
WINDENERGIE : SYNCHRONE GENERATOREN
 WINDENERGIE : REACTIEF VERMOGEN INHOUD: SYNCHRONE GENERATOREN Het equivalent schema Geleverde stromen en vermogens Het elektrisch net Een synchrone generator is een spanningsbron. Het equivalent schema
WINDENERGIE : REACTIEF VERMOGEN INHOUD: SYNCHRONE GENERATOREN Het equivalent schema Geleverde stromen en vermogens Het elektrisch net Een synchrone generator is een spanningsbron. Het equivalent schema
De bisectie methode uitgelegd met een makkelijk voorbeeld
 De Bisectie methode De bisectie methode uitgelegd met een makkelijk voorbeeld De bisectie methode is een recursieve methode om punten van een functie te gaan afschatten. Hierbij gaat men de functiewaarde
De Bisectie methode De bisectie methode uitgelegd met een makkelijk voorbeeld De bisectie methode is een recursieve methode om punten van een functie te gaan afschatten. Hierbij gaat men de functiewaarde
One VLT for all motors free choice of motor and optimal operation
 1 One VLT for all motors free choice of motor and optimal operation Waarom zoveel verschillende motor technologieën? De asynchroon wisselstroom motor Super betrouwbaar Alle vermogens beschikbaar Direct
1 One VLT for all motors free choice of motor and optimal operation Waarom zoveel verschillende motor technologieën? De asynchroon wisselstroom motor Super betrouwbaar Alle vermogens beschikbaar Direct
Fundamentele elektriciteit
 KONNKLJKE MLTARE CHOOL Leerstoel Elektriciteit 1 oktober 2002 11 TAW Fundamentele elektriciteit Praktisch werk 6 Oplossingen 1. Twee identieke permanente magneten hebben elk een magnetisch veld van 2 T
KONNKLJKE MLTARE CHOOL Leerstoel Elektriciteit 1 oktober 2002 11 TAW Fundamentele elektriciteit Praktisch werk 6 Oplossingen 1. Twee identieke permanente magneten hebben elk een magnetisch veld van 2 T
SYSTEMEN 11/3/2009. Deze toets bestaat uit 3 opgaven (28 punten). Gebruik eigen grafische rekenmachine en BINAS toegestaan. Veel succes!
. Gebruik eigen grafische rekenmachine en BINAS toegestaan. Veel succes!") NATUURKUNDE KLAS 4 PROEFWERK HOOFDSTUK 3: AUTOMATISCHE SYSTEMEN OOFDSTUK 3: A 11/3/2009 Deze toets bestaat uit 3 opgaven (28 punten). Gebruik eigen grafische rekenmachine en BINAS toegestaan. Veel succes!
NATUURKUNDE KLAS 4 PROEFWERK HOOFDSTUK 3: AUTOMATISCHE SYSTEMEN OOFDSTUK 3: A 11/3/2009 Deze toets bestaat uit 3 opgaven (28 punten). Gebruik eigen grafische rekenmachine en BINAS toegestaan. Veel succes!
De overgang van een gelineariseerde schakeling naar signaalverwerkingsblok
 De overgang van een gelineariseerde schakeling naar signaalverwerkingsblok Stefan Cosemans (stefan.cosemans@esat.kuleuven.be) http://homes.esat.kuleuven.be/~scoseman/basisschakelingen/ Voorwoord In deze
De overgang van een gelineariseerde schakeling naar signaalverwerkingsblok Stefan Cosemans (stefan.cosemans@esat.kuleuven.be) http://homes.esat.kuleuven.be/~scoseman/basisschakelingen/ Voorwoord In deze
ELEKTRICITEIT GELIJKSTROOMMOTOREN - LABO
 ELEKTRICITEIT GELIJKSTROOMMOTOREN - LABO Technisch Instituut Sint-Jozef Wijerstraat 28, B -3740 Bilzen Cursus: I. Claesen/R.Slechten Versie:18/11/2004 1 PROEVEN OP GELIJKSTROOMMOTOREN...2 1.1 Inleiding...2
ELEKTRICITEIT GELIJKSTROOMMOTOREN - LABO Technisch Instituut Sint-Jozef Wijerstraat 28, B -3740 Bilzen Cursus: I. Claesen/R.Slechten Versie:18/11/2004 1 PROEVEN OP GELIJKSTROOMMOTOREN...2 1.1 Inleiding...2
Beckhoff. Motion Control PTP 03.05.2013 1
 Beckhoff Motion Control PTP 03.05.2013 1 Motion Control PTP Agenda: Wat is Motion Control. TwinCAT Motion Controller. Stappenmotor in Open Loop Control Stappenmotor in Closed Loop Control ServoDrive AX5000
Beckhoff Motion Control PTP 03.05.2013 1 Motion Control PTP Agenda: Wat is Motion Control. TwinCAT Motion Controller. Stappenmotor in Open Loop Control Stappenmotor in Closed Loop Control ServoDrive AX5000
spanning. * Deel het verschil daarvan en deel dat getal door de gewenste stroom om de weerstandswaarde te krijgen.
 Weerstand stroombeperking voor LED s Om de stroom door een LED te beperken wordt een weerstand toegepast. Maar hoe hoog moet de waarde van zo n weerstand eigenlijk zijn? In de dagelijkse praktijk wordt
Weerstand stroombeperking voor LED s Om de stroom door een LED te beperken wordt een weerstand toegepast. Maar hoe hoog moet de waarde van zo n weerstand eigenlijk zijn? In de dagelijkse praktijk wordt
2 Vraagstuk Dynamicaboek (Kermisattractie)
") Kermisattractie Wisnet-HB update april 009 1 Benodigde wiskunde-onderwerpen Vectoren (eerst in de R) Poolcoördinaten (r en φ) Differentiëren (plaats, snelheid en versnelling en maximum/minimum bepalen)
Kermisattractie Wisnet-HB update april 009 1 Benodigde wiskunde-onderwerpen Vectoren (eerst in de R) Poolcoördinaten (r en φ) Differentiëren (plaats, snelheid en versnelling en maximum/minimum bepalen)
Hoofdstuk 5: Elektro-akoestische omzetters
 Elektronica: Tweede kandidatuur industrieel ingenieur 1 Hoofdstuk 5: Elektro-akoestische omzetters In dit korte hoofdstuk is het enkel de bedoeling enkele elektro-akoestische basisprincipes aan bod te
Elektronica: Tweede kandidatuur industrieel ingenieur 1 Hoofdstuk 5: Elektro-akoestische omzetters In dit korte hoofdstuk is het enkel de bedoeling enkele elektro-akoestische basisprincipes aan bod te
Materialen in de elektronica Verslag Practicum 1
 Materialen in de elektronica Verslag Practicum 1 Academiejaar 2014-2015 Groep 2 Sander Cornelis Stijn Cuyvers In dit practicum zullen we de diëlektrische eigenschappen van een vloeibaar kristal bepalen.
Materialen in de elektronica Verslag Practicum 1 Academiejaar 2014-2015 Groep 2 Sander Cornelis Stijn Cuyvers In dit practicum zullen we de diëlektrische eigenschappen van een vloeibaar kristal bepalen.
Theory DutchBE (Belgium) Niet-lineaire dynamica in elektrische schakelingen (10 punten)
 Niet-lineaire dynamica in elektrische schakelingen (10 punten)") Q2-1 Niet-lineaire dynamica in elektrische schakelingen (10 punten) Neem voor het begin van deze opgave de algemene instructies uit de aparte enveloppe door! Inleiding Bistabiele niet-lineaire halfgeleider
Q2-1 Niet-lineaire dynamica in elektrische schakelingen (10 punten) Neem voor het begin van deze opgave de algemene instructies uit de aparte enveloppe door! Inleiding Bistabiele niet-lineaire halfgeleider
Overgangsverschijnselen
 Hoofdstuk 5 Overgangsverschijnselen Doelstellingen 1. Overgangsverschijnselen van RC en RL ketens kunnen uitleggen waarbij de wiskundige afleiding van ondergeschikt belang is Als we een condensator of
Hoofdstuk 5 Overgangsverschijnselen Doelstellingen 1. Overgangsverschijnselen van RC en RL ketens kunnen uitleggen waarbij de wiskundige afleiding van ondergeschikt belang is Als we een condensator of
Klasse B versterkers
 Klasse B versterkers Jan Genoe KHLim Universitaire Campus, Gebouw B 359 Diepenbeek Belgium http://www.khlim.be/~jgenoe In dit hoofdstuk bespreken we de Klasse B en de klasse G versterker. Deze versterker
Klasse B versterkers Jan Genoe KHLim Universitaire Campus, Gebouw B 359 Diepenbeek Belgium http://www.khlim.be/~jgenoe In dit hoofdstuk bespreken we de Klasse B en de klasse G versterker. Deze versterker
Invloed van IT uitbesteding op bedrijfsvoering & IT aansluiting
 xvii Invloed van IT uitbesteding op bedrijfsvoering & IT aansluiting Samenvatting IT uitbesteding doet er niet toe vanuit het perspectief aansluiting tussen bedrijfsvoering en IT Dit proefschrift is het
xvii Invloed van IT uitbesteding op bedrijfsvoering & IT aansluiting Samenvatting IT uitbesteding doet er niet toe vanuit het perspectief aansluiting tussen bedrijfsvoering en IT Dit proefschrift is het
De Permanent Magneet Motor: Thierry Dejaegere. Thinnov Lomolenstraat 2 9880 Aalter Lotenhulle België www.thinnov.be
 De Permanent Magneet Motor: door: Thierry Dejaegere Thinnov Lomolenstraat 2 9880 Aalter Lotenhulle België www.thinnov.be I. Voorwoord De zoektocht naar alternatieve energiebronnen is reeds lange tijd aan
De Permanent Magneet Motor: door: Thierry Dejaegere Thinnov Lomolenstraat 2 9880 Aalter Lotenhulle België www.thinnov.be I. Voorwoord De zoektocht naar alternatieve energiebronnen is reeds lange tijd aan
LABO. Elektriciteit OPGAVE: Karakteristieken van synchrone generatoren. Remediering: Datum van opgave: Datum van afgifte: Verslag nr. : 06.
 LABO Elektriciteit OPGAVE: Datum van opgave:.../ /... Datum van afgifte:.../ /... Verslag nr. : 06 Leerling: Karakteristieken van synchrone generatoren Assistenten: Klas: 3.2 EIT KTA Ieper Totaal :.../100
LABO Elektriciteit OPGAVE: Datum van opgave:.../ /... Datum van afgifte:.../ /... Verslag nr. : 06 Leerling: Karakteristieken van synchrone generatoren Assistenten: Klas: 3.2 EIT KTA Ieper Totaal :.../100
 www. Fysica 1997-1 Vraag 1 Een herdershond moet een kudde schapen, die over haar totale lengte steeds 50 meter lang blijft, naar een 800 meter verderop gelegen schuur brengen. Door steeds van de kop van
www. Fysica 1997-1 Vraag 1 Een herdershond moet een kudde schapen, die over haar totale lengte steeds 50 meter lang blijft, naar een 800 meter verderop gelegen schuur brengen. Door steeds van de kop van

LEERACTIVITEIT: De stroomkring in beeld
 LEERACTIVITEIT: De stroomkring in beeld Duur leeractiviteit Graad Richting Vak Onderwijsnet Leerplan 2 3 ASO/TSO Fysica Toegepaste Fysica Elektriciteit Vrij onderwijs/go Bruikbaar in alle leerplannen met
LEERACTIVITEIT: De stroomkring in beeld Duur leeractiviteit Graad Richting Vak Onderwijsnet Leerplan 2 3 ASO/TSO Fysica Toegepaste Fysica Elektriciteit Vrij onderwijs/go Bruikbaar in alle leerplannen met
FOR DUTCH STUDENTS! ENGLISH VERSION NEXT PAGE. Toets Inleiding Kansrekening 1 8 februari 2010
 FOR DUTCH STUDENTS! ENGLISH VERSION NEXT PAGE Toets Inleiding Kansrekening 1 8 februari 2010 Voeg aan het antwoord van een opgave altijd het bewijs, de berekening of de argumentatie toe. Als je een onderdeel
FOR DUTCH STUDENTS! ENGLISH VERSION NEXT PAGE Toets Inleiding Kansrekening 1 8 februari 2010 Voeg aan het antwoord van een opgave altijd het bewijs, de berekening of de argumentatie toe. Als je een onderdeel
Testen en metingen op windenergie.
 Testen en metingen op windenergie. Inleiding Als we rond groene energie begonnen te denken, dan kwam windenergie als een van de meest vanzelfsprekende vormen van groene energie naar boven. De wind heeft
Testen en metingen op windenergie. Inleiding Als we rond groene energie begonnen te denken, dan kwam windenergie als een van de meest vanzelfsprekende vormen van groene energie naar boven. De wind heeft
5. HOOFDSTUK 5 SYNCHRONE MACHINES
 5. HOOFDSTK 5 SYNCHRON MACHNS 5.1 quivalent schema, fasordiagram Zoals bij de inductiemachine heeft men ook hier te doen met een draaiveld. De rotor wordt gevoed met gelijkstroom. De spanningsvergelijkingen
5. HOOFDSTK 5 SYNCHRON MACHNS 5.1 quivalent schema, fasordiagram Zoals bij de inductiemachine heeft men ook hier te doen met een draaiveld. De rotor wordt gevoed met gelijkstroom. De spanningsvergelijkingen
Harmonischen: een virus op het net? FOCUS
 Amplitude Harmonischen: een virus op het net? FOCUS In het kader van rationale energieverbruik (REG) wordt steeds gezocht om verbruikers energie efficiënter te maken. Hierdoor gaan verbruikers steeds meer
Amplitude Harmonischen: een virus op het net? FOCUS In het kader van rationale energieverbruik (REG) wordt steeds gezocht om verbruikers energie efficiënter te maken. Hierdoor gaan verbruikers steeds meer
Non Diffuse Point Based Global Illumination
 Non Diffuse Point Based Global Illumination Karsten Daemen Thesis voorgedragen tot het behalen van de graad van Master of Science in de ingenieurswetenschappen: computerwetenschappen Promotor: Prof. dr.
Non Diffuse Point Based Global Illumination Karsten Daemen Thesis voorgedragen tot het behalen van de graad van Master of Science in de ingenieurswetenschappen: computerwetenschappen Promotor: Prof. dr.
1. Langere vraag over de theorie
 1. Langere vraag over de theorie Maak gebruik van de methode van de fasoren (teken ook het betreffende diagramma) om het verband tussen stroom en spanning te bepalen in een LC-kring die aangedreven wordt
1. Langere vraag over de theorie Maak gebruik van de methode van de fasoren (teken ook het betreffende diagramma) om het verband tussen stroom en spanning te bepalen in een LC-kring die aangedreven wordt
Departement industriële wetenschappen en technologie
 Departement industriële wetenschappen en technologie Universitaire Campus, gebouw B B-3590 DIEPENBEEK Tel.: 011-23 07 90 Fax: 011-23 07 99 Aansturen en testen van een hybride infrarood beeldopnemer Abstract
Departement industriële wetenschappen en technologie Universitaire Campus, gebouw B B-3590 DIEPENBEEK Tel.: 011-23 07 90 Fax: 011-23 07 99 Aansturen en testen van een hybride infrarood beeldopnemer Abstract
RESATO S NIEUWE TYPE WATERJET R-LCM
 RESATO S NIEUWE TYPE WATERJET R-LCM Abrasief waterstraalsnijmachines voorzien van lineaire motoren THE BETTER WAY TO HIGHER CUTTING PERFORMANCE Abrasief waterstraalsnijmachines voorzien van lineaire motoren
RESATO S NIEUWE TYPE WATERJET R-LCM Abrasief waterstraalsnijmachines voorzien van lineaire motoren THE BETTER WAY TO HIGHER CUTTING PERFORMANCE Abrasief waterstraalsnijmachines voorzien van lineaire motoren
NATIONALE NATUURKUNDE OLYMPIADE. Tweede ronde - theorie toets. 21 juni beschikbare tijd : 2 x 2 uur
 NATIONALE NATUURKUNDE OLYMPIADE Tweede ronde - theorie toets 21 juni 2000 beschikbare tijd : 2 x 2 uur 52 --- 12 de tweede ronde DEEL I 1. Eugenia. Onlangs is met een telescoop vanaf de Aarde de ongeveer
NATIONALE NATUURKUNDE OLYMPIADE Tweede ronde - theorie toets 21 juni 2000 beschikbare tijd : 2 x 2 uur 52 --- 12 de tweede ronde DEEL I 1. Eugenia. Onlangs is met een telescoop vanaf de Aarde de ongeveer
Case 1 en Simulink. 1. Diodefactor bepalen. I = I sc - I s (e!
 Case 1 en Simulink 1. Diodefactor bepalen Om de diodefactor te berekenen werden eerst een aantal metingen gedaan met het zonnepaneel en de DC- motor. Er werd een kring gemaakt met het zonnepaneel en een
Case 1 en Simulink 1. Diodefactor bepalen Om de diodefactor te berekenen werden eerst een aantal metingen gedaan met het zonnepaneel en de DC- motor. Er werd een kring gemaakt met het zonnepaneel en een
Materialen in de Electronica Practicum 2 : Een zonnecel en een diode (dinsdag 21 april 2015)
") Vakgroep Ingenieurswetenschappen en Architectuur Academiejaar 2014-2015 Materialen in de Electronica Practicum 2 : Een zonnecel en een diode (dinsdag 21 april 2015) Groep 6 Cuyvers Stijn Pascal Jaron Van
Vakgroep Ingenieurswetenschappen en Architectuur Academiejaar 2014-2015 Materialen in de Electronica Practicum 2 : Een zonnecel en een diode (dinsdag 21 april 2015) Groep 6 Cuyvers Stijn Pascal Jaron Van
1. Opwekken van een sinusoïdale wisselspanning.
 1. Opwekken van een sinusoïdale wisselspanning. Bij de industriële opwekking van de elektriciteit maakt men steeds gebruik van een draaiende beweging. Veronderstel dat een spoel met rechthoekige doorsnede
1. Opwekken van een sinusoïdale wisselspanning. Bij de industriële opwekking van de elektriciteit maakt men steeds gebruik van een draaiende beweging. Veronderstel dat een spoel met rechthoekige doorsnede
Vier voorbeelden van Fourier
 Vier voorbeelden van Fourier Gjerrit Meinsma Mathematisch Café 1 Overzicht 1. Wereldkampioen matrix-vectorproduct 2. Fast Fourier Transform (FFT) 3. Voorbeelden: routers jpeg producten antialiasing Mathematisch
Vier voorbeelden van Fourier Gjerrit Meinsma Mathematisch Café 1 Overzicht 1. Wereldkampioen matrix-vectorproduct 2. Fast Fourier Transform (FFT) 3. Voorbeelden: routers jpeg producten antialiasing Mathematisch
Een kogel die van een helling afrolt, ondervindt een constante versnelling. Deze versnelling kan berekend worden met de formule:
 Voorbeeldmeetrapport (eenparig versnelde beweging stopwatch en meetlat) Eenparig versnelde beweging stopwatch en meetlat. Doel van de proef Een kogel die van een helling afrolt, voert een eenparig versnelde
Voorbeeldmeetrapport (eenparig versnelde beweging stopwatch en meetlat) Eenparig versnelde beweging stopwatch en meetlat. Doel van de proef Een kogel die van een helling afrolt, voert een eenparig versnelde
Inhoudsopgave. www.freewebs.com/nick_electronics - 2 -
 Inhoudsopgave Inhoudsopgave... 2 Inleiding... 3 Generatoren... 3 Project:... 4 Werking...4 Berekeningen...4...4...4 Schema... 4 Tip... 4 Componentenlijst... 5...5...5 Datasheets...5...5...5 Afbeeldingen...
Inhoudsopgave Inhoudsopgave... 2 Inleiding... 3 Generatoren... 3 Project:... 4 Werking...4 Berekeningen...4...4...4 Schema... 4 Tip... 4 Componentenlijst... 5...5...5 Datasheets...5...5...5 Afbeeldingen...
5 Elektronische sturing (VSE) 5.1 Werking Schema. Tractor
 5.1 Werking Schema. Tractor") 5 Elektronische sturing (VSE) 5.1 Werking 5.1.1 Schema 9 10 M 4 Tractor 8 2 7 7 5 1 5 1 6 3 3 62 1. Cilinders 2. ECU 3. Hoeksensor 4. Kingpensensor 5. Hydrauliek unit 6. Centreerleiding 7. Stuurleidingen
5 Elektronische sturing (VSE) 5.1 Werking 5.1.1 Schema 9 10 M 4 Tractor 8 2 7 7 5 1 5 1 6 3 3 62 1. Cilinders 2. ECU 3. Hoeksensor 4. Kingpensensor 5. Hydrauliek unit 6. Centreerleiding 7. Stuurleidingen
We willen dat de magnetische inductie in het punt K gelijk aan rul zou worden. Daartoe moet men door de draad AB een stroom sturen die gelijk is aan
 jaar: 1995 nummer: 28 Twee zeer lange draden zijn evenwijdig opgesteld. De stroom door de linkse draad ( zie figuur) is in grootte gelijk aan 30 A en de zin ervan wordt aangegeven door de pijl. We willen
jaar: 1995 nummer: 28 Twee zeer lange draden zijn evenwijdig opgesteld. De stroom door de linkse draad ( zie figuur) is in grootte gelijk aan 30 A en de zin ervan wordt aangegeven door de pijl. We willen
VLT AutomationDrive FC 302 Integrated Motion Controller IMC
 VLT AutomationDrive FC 302 Integrated Motion Controller IMC Applicatie voorbeelden Precieze stop Positionering met touch probe 2 Applicatie voorbeelden Pick & Place Touch probe positioning 3 Applicatie
VLT AutomationDrive FC 302 Integrated Motion Controller IMC Applicatie voorbeelden Precieze stop Positionering met touch probe 2 Applicatie voorbeelden Pick & Place Touch probe positioning 3 Applicatie
Motormanagement simulatie MegaSquirt Hoofdstuk 9
 Motormanagement simulatie MegaSquirt Hoofdstuk 9 ISBN 978-90-79302-12-3 Steele B.V Ep Gernaat 1 Stationair draaien TunerStudio en de MS2Extra firmware ondersteunen verschillende stationaire regeluitvoeringen.
Motormanagement simulatie MegaSquirt Hoofdstuk 9 ISBN 978-90-79302-12-3 Steele B.V Ep Gernaat 1 Stationair draaien TunerStudio en de MS2Extra firmware ondersteunen verschillende stationaire regeluitvoeringen.
Nadere beschouwing. Subtransiënt gedrag
 Nadere beschouwing. Subtransiënt gedrag Hoofdstuk bladzijde 29. Invloeden op de demping van de niet-geregelde synchrone generator, gekoppeld op een star net Vooraf 29.1. Overzicht van het onderzoek 29-1
Nadere beschouwing. Subtransiënt gedrag Hoofdstuk bladzijde 29. Invloeden op de demping van de niet-geregelde synchrone generator, gekoppeld op een star net Vooraf 29.1. Overzicht van het onderzoek 29-1
Techno Fysica b.v. Platform tandwielen 1 oktober Welkom -
 Techno Fysica b.v. Platform tandwielen 1 oktober 2009 - Welkom - Introductie Techno Fysica b.v. Monitoring Lastmetingen Meetsystemen Diagnose Meten Schadeanalyse Rekenen Condition monitoring - Introductie
Techno Fysica b.v. Platform tandwielen 1 oktober 2009 - Welkom - Introductie Techno Fysica b.v. Monitoring Lastmetingen Meetsystemen Diagnose Meten Schadeanalyse Rekenen Condition monitoring - Introductie
Energiemanagement Windturbines
 Energiemanagement Windturbines Treinen op windenergie https://www.youtube.com/watch?v=sl3xgrl7kzu Windturbines: onderdelen / kosten Modern vasten is een week zonder computer, internet en telefoon - Annet
Energiemanagement Windturbines Treinen op windenergie https://www.youtube.com/watch?v=sl3xgrl7kzu Windturbines: onderdelen / kosten Modern vasten is een week zonder computer, internet en telefoon - Annet
XXX INTERNATIONALE NATUURKUNDE OLYMPIADE LEICESTER, GROOT BRITANNIË PRACTICUM-TOETS
 XXX INTERNATIONALE NATUURKUNDE OLYMPIADE LEICESTER, GROOT BRITANNIË PRACTICUM-TOETS 12 juli 2000 72 --- 13 de internationale olympiade De magnetische schijf 2,5 uur Geef in dit experiment een schatting
XXX INTERNATIONALE NATUURKUNDE OLYMPIADE LEICESTER, GROOT BRITANNIË PRACTICUM-TOETS 12 juli 2000 72 --- 13 de internationale olympiade De magnetische schijf 2,5 uur Geef in dit experiment een schatting
Industriële wetenschappen
 Geïntigreerde eindproef Industriële wetenschappen leerjaar graad TSO De jonglerende robot Stijn Cambie Jonathan Debruyne 2011-2012 De jonglerende robot Stijn Cambie en Jonathan Debruyne 1 1 Woord vooraf
Geïntigreerde eindproef Industriële wetenschappen leerjaar graad TSO De jonglerende robot Stijn Cambie Jonathan Debruyne 2011-2012 De jonglerende robot Stijn Cambie en Jonathan Debruyne 1 1 Woord vooraf
VOORBLAD SCHRIFTELIJKE TOETSEN
 VOORBLAD SCHRIFTELIJKE TOETSEN OPLEIDING : MECHATRONICA TOETSCODE : UITWERKINGEN MECH5-T GROEP : MEH2 TOETSDATUM : 4 APRIL 206 TIJD : :00 2:30 AANTAL PAGINA S (incl. voorblad) : 9 DEZE TOETS BESTAAT UIT
VOORBLAD SCHRIFTELIJKE TOETSEN OPLEIDING : MECHATRONICA TOETSCODE : UITWERKINGEN MECH5-T GROEP : MEH2 TOETSDATUM : 4 APRIL 206 TIJD : :00 2:30 AANTAL PAGINA S (incl. voorblad) : 9 DEZE TOETS BESTAAT UIT
Speciale transformatoren
 Speciale transformatoren 6-55 pmo 5 april 26 Phase to Phase BV Utrechtseweg 31 Postbus 1 68 AC Arnhem T: 26 352 37 F: 26 352 379 www.phasetophase.nl 2 6-55 pmo 1 INLEIDING Speciale transformatoren zijn
Speciale transformatoren 6-55 pmo 5 april 26 Phase to Phase BV Utrechtseweg 31 Postbus 1 68 AC Arnhem T: 26 352 37 F: 26 352 379 www.phasetophase.nl 2 6-55 pmo 1 INLEIDING Speciale transformatoren zijn
Bijlage frequentieregeling Frequentieregeling
 Bijlage frequentieregeling Frequentieregeling Opbouw van een frequentieregelaar Alle typen frequentieregelaars werken volgens hetzelfde hoofdprincipe, zie fig. 1. Hierbij wordt de driefasenspanning van
Bijlage frequentieregeling Frequentieregeling Opbouw van een frequentieregelaar Alle typen frequentieregelaars werken volgens hetzelfde hoofdprincipe, zie fig. 1. Hierbij wordt de driefasenspanning van
toelatingsexamen-geneeskunde.be Gebaseerd op nota s tijdens het examen, daarom worden niet altijd antwoordmogelijkheden vermeld.
 Wiskunde juli 2009 Laatste aanpassing: 29 juli 2009. Gebaseerd op nota s tijdens het examen, daarom worden niet altijd antwoordmogelijkheden vermeld. Vraag 1 Wat is de top van deze parabool 2 2. Vraag
Wiskunde juli 2009 Laatste aanpassing: 29 juli 2009. Gebaseerd op nota s tijdens het examen, daarom worden niet altijd antwoordmogelijkheden vermeld. Vraag 1 Wat is de top van deze parabool 2 2. Vraag
Wanda Guedens en Monique Reynders. Universiteit Hasselt, België
 Wanda Guedens en Monique Reynders Universiteit Hasselt, België Van chemisch experiment tot wiskundig model Hoe chemie en wiskunde elkaars maatje worden Data-analyse komt neer op het zoeken naar onderlinge
Wanda Guedens en Monique Reynders Universiteit Hasselt, België Van chemisch experiment tot wiskundig model Hoe chemie en wiskunde elkaars maatje worden Data-analyse komt neer op het zoeken naar onderlinge
Matthias Van Wonterghem, Pieter Vanhulsel Aluminium en hoge snelheid, een mooie toekomst?
 Matthias Van Wonterghem, Pieter Vanhulsel Aluminium en hoge snelheid, een mooie toekomst? Milieu is een hot topic. En terecht. Het is nu dat er moet gediscussieerd worden om onze huidige levenskwaliteit
Matthias Van Wonterghem, Pieter Vanhulsel Aluminium en hoge snelheid, een mooie toekomst? Milieu is een hot topic. En terecht. Het is nu dat er moet gediscussieerd worden om onze huidige levenskwaliteit
Percentage afwijkingen groter dan vijf decibel
 Om beter op zoek te kunnen gaan waar er verbeteringen kunnen toegevoegd worden aan de algoritmes heb ik een hulpfunctie gemaakt die in plaats van het interpoleren tussen fingerprints slechts de positie
Om beter op zoek te kunnen gaan waar er verbeteringen kunnen toegevoegd worden aan de algoritmes heb ik een hulpfunctie gemaakt die in plaats van het interpoleren tussen fingerprints slechts de positie
Exponentiële Functie: Toepassingen
 Exponentiële Functie: Toepassingen 1 Overgang tussen exponentiële functies en lineaire functies Wanneer we werken met de exponentiële functie is deze niet altijd gemakkelijk te herkennen. Daarom proberen
Exponentiële Functie: Toepassingen 1 Overgang tussen exponentiële functies en lineaire functies Wanneer we werken met de exponentiële functie is deze niet altijd gemakkelijk te herkennen. Daarom proberen
Historische autotechniek (4)
") Historische autotechniek (4) E. Gernaat (ISBN in overweging) 1 Dynamo en regelaar 1.1 Gelijkstroomdynamo De klassieke, historische dynamo (generator) staat bekent onder gelijkstroomdynamo. Moderne dynamo
Historische autotechniek (4) E. Gernaat (ISBN in overweging) 1 Dynamo en regelaar 1.1 Gelijkstroomdynamo De klassieke, historische dynamo (generator) staat bekent onder gelijkstroomdynamo. Moderne dynamo
Onderzoek werking T-verter.
 Onderzoek werking T-verter. De Beer Gino Page 1 02/10/2007 Inhoudstabel: 1. Doelstellingen. 2. Benodigd materiaal. 3. Bespreking van de frequentieregelaar. 4. Instellingen en gebruik van de frequentieregelaar.
Onderzoek werking T-verter. De Beer Gino Page 1 02/10/2007 Inhoudstabel: 1. Doelstellingen. 2. Benodigd materiaal. 3. Bespreking van de frequentieregelaar. 4. Instellingen en gebruik van de frequentieregelaar.
De wet van Ohm anders
 De wet van Ohm anders Elektrische stroom gaat niet altijd even gemakkelijk door een stroomdraad. Soms gaat het zelfs erg moeilijk of bijna niet. We zeggen dan: de draad heeft een weerstand. Er moet moeite
De wet van Ohm anders Elektrische stroom gaat niet altijd even gemakkelijk door een stroomdraad. Soms gaat het zelfs erg moeilijk of bijna niet. We zeggen dan: de draad heeft een weerstand. Er moet moeite
, met ω de hoekfrequentie en
 Opgave 1. a) De brekingsindex van een stof, n, wordt gegeven door: A n = 1 +, ω ω, met ω de hoekfrequentie en ( ω ω) + γ ω, A en γ zijn constantes. Geef uitdrukkingen voor de fasesnelheid en de groepssnelheid
Opgave 1. a) De brekingsindex van een stof, n, wordt gegeven door: A n = 1 +, ω ω, met ω de hoekfrequentie en ( ω ω) + γ ω, A en γ zijn constantes. Geef uitdrukkingen voor de fasesnelheid en de groepssnelheid
Repetitie magnetisme voor 3HAVO (opgavenblad met waar/niet waar vragen)
") Repetitie magnetisme voor 3HAVO (opgavenblad met waar/niet waar vragen) Ga na of de onderstaande beweringen waar of niet waar zijn (invullen op antwoordblad). 1) De krachtwerking van een magneet is bij
Repetitie magnetisme voor 3HAVO (opgavenblad met waar/niet waar vragen) Ga na of de onderstaande beweringen waar of niet waar zijn (invullen op antwoordblad). 1) De krachtwerking van een magneet is bij
Juli blauw Fysica Vraag 1
 Fysica Vraag 1 Een rode en een zwarte sportwagen bevinden zich op een rechte weg. Om de posities van de wagens te beschrijven, wordt een x-as gebruikt die parallel aan de weg georiënteerd is. Op het ogenblik
Fysica Vraag 1 Een rode en een zwarte sportwagen bevinden zich op een rechte weg. Om de posities van de wagens te beschrijven, wordt een x-as gebruikt die parallel aan de weg georiënteerd is. Op het ogenblik
Vuistregels voor energie-efficiënte robotprogrammatie
 Vuistregels voor energie-efficiënte robotprogrammatie Inleiding Energie-efficiëntie is zelden de primaire zorg bij het programmeren van een robot. Hoewel er in onderzoek reeds methodes werden ontwikkeld
Vuistregels voor energie-efficiënte robotprogrammatie Inleiding Energie-efficiëntie is zelden de primaire zorg bij het programmeren van een robot. Hoewel er in onderzoek reeds methodes werden ontwikkeld
Derde serie opdrachten systeemtheorie
 Derde serie opdrachten systeemtheorie Opdracht 1. We bekijken een helicopter die ongeveer stilhangt in de lucht. Bij benadering kan zo n helicopter beschreven worden door het volgende stelsel vergelijkingen
Derde serie opdrachten systeemtheorie Opdracht 1. We bekijken een helicopter die ongeveer stilhangt in de lucht. Bij benadering kan zo n helicopter beschreven worden door het volgende stelsel vergelijkingen
Digitale systemen. Hoofdstuk 6. 6.1 De digitale regelaar
 Hoofdstuk 6 Digitale systemen Doelstellingen 1. Weten dat digitale systemen andere stabiliteitsvoorwaarden hebben In deze tijd van digitalisatie is het gebruik van computers in regelkringen alom.denk maar
Hoofdstuk 6 Digitale systemen Doelstellingen 1. Weten dat digitale systemen andere stabiliteitsvoorwaarden hebben In deze tijd van digitalisatie is het gebruik van computers in regelkringen alom.denk maar
Vandaag. Uur 1: Differentiaalvergelijkingen Uur 2: Modellen
 Vandaag Uur 1: Differentiaalvergelijkingen Uur 2: Modellen Diferentiaalvergelijkingen Wiskundige beschrijving van dynamische processen Vergelijking voor y(t): grootheid die in de tijd varieert Voorbeelden:
Vandaag Uur 1: Differentiaalvergelijkingen Uur 2: Modellen Diferentiaalvergelijkingen Wiskundige beschrijving van dynamische processen Vergelijking voor y(t): grootheid die in de tijd varieert Voorbeelden: