Roboteers en Robotensters
|
|
|
- Nathalie Claessens
- 5 jaren geleden
- Aantal bezoeken:
Transcriptie

1 Najaar 2017 Versie 30 Roboteers en Robotensters Welkom in de wereld van de Mechatronica Wij, Robotics CCFZ uit Bergen op Zoom, vinden het fijn om nieuwe Roboteers en Robotensters te helpen bij hun eerste stappen Maar ook ervaren hobbyisten willen we graag kennen Misschien vinden die het interessant om ook deze robot te bouwen Kunnen we niet alleen binnen onze vereniging, maar ook met anderen ideeën en ervaringen uitwisselen Er zijn nog twee Robotclubs in Nederlandstalig gebied: HCC Robotica, komt maandelijks bij elkaar in Hooglanderveen, bij Amersfoort, RobotMC, maandelijkse bijeenkomst in St Katelijne Waver, bij Mechelen (B) Wij, Robotics-CCFZ zijn de jongste met ons 12-jarig bestaan Elk van de clubs heeft een eigen stijl Onderlinge bezoeken vinden regelmatig plaats Wij ontwikkelden een heel betaalbaar robotbouw-pakket, dat heel veel mogelijkheden biedt De prijs is ca 25 euro Wij ondersteunen startende Roboteers en Robotensters met ons pakket, met deze uitgebreide (elektronische) handleiding en met verdere hulp Want een robot bouwen is niet eenvoudig En kan ook niet in een paar uur Het vergt studie, experimenteren, creativiteit en vooral ook doorzettingsvermogen Maar het resultaat is kicken Wat je nodig hebt is een laptop (smartphone of tablet is niet genoeg) Op die laptop wordt de IDE geïnstalleerd (IDE = Integrated Development Environment, het programma, waarop je de robotcode invoert en waarmee je die weer naar je robot overhevelt) We zijn een gewone hobbyclub en hebben geen inkomsten uit onze inspanningen, we genieten van hobbyisten die zich met technische zaken bezig houden En we zijn van mening, dat je toekomst er beter uitziet als je veel van Mechatronica weet Veel plezier en succes met het bouwen van deze Robot Groep Robotics-CCFZ 1
2 Inhoud Robotkit CCFZ 3 Het ZIP-bestand 3 Elektronische componenten met bestelinformatie 4 Montage elektronica 5 De Laptop voorbereiden 6 Sketch 7 Motortest 9 De sensor programmeren 10 Totaalplaatje 12 Analyse meetgegevens 14 Complete sketch 15 Verdere mogelijkheden 20 Studiemateriaal 20 Technische informatie 21 2




verf of inkt een kleurtje")


3 1 Robotkit CCFZ De Robot kit CCFZ bestaat uit: Een zip bestand, waarin de stl-bestanden zijn opgenomen De stl-bestanden zijn tekeningen van de mechanische onderdelen, die met een 3D-printer kunnen worden gemaakt Een lijst met elektronische componenten en hun leverancier Een prijsindicatie wordt genoemd, maar kan verouderen De elektronische onderdelen passen in de door de 3D-printer gemaakte componenten Deze Handleiding We hebben die zo goed mogelijk geredigeerd Aanvullingen en suggesties voor verbeteringen zijn welkom 2 Het ZIP-bestand Hieronder zijn de onderdelen weergegeven met het voor een robot benodigde aantal De tekeningen zijn door een van onze leden gemaakt en mogen vrij worden gebruikt voor hobby-doeleinden Dus niet voor commerciële toepassingen 2x_Mal_Wiel 2x_Mal_Wiel 2x_Wiel_CCFZ Links en midden, twee mallen om de band om het wiel te maken Doe in een bak water met ruim afwasmiddel Spuit hierin siliconenkit dat je eventueel met (acryl-)verf of inkt een kleurtje geeft Vervolgens maak je je handen (huishoudhandschoenen) vet met water en afwasmiddel, even kneden en in de vorm persen Na een dag kun je de banden voor je robot uit de mallen nemen 2x_Slot_Voor_Motor 8x_Bevestiging_Pin Achter_Wiel Controller_Houder Achter_Wiel_Houder Het Motorslot is een opvulplaatje op het motortje om het vast te klemmen in het frame Het geheel wordt vastgeklemd door de Motorklem in de uitgespaarde gleuven te plaatsen 3




4 De bevestigingspinnen dienen om diverse onderdelen aan het frame te koppelen Het achterwiel is een casterwiel dat in de achterwielhouder wordt geplaatst De as is 1,75 mm, gebruik hiervoor een klein stukje filament Met een hete soldeerbout wordt die zonodig aan een kant vastgesmolten De controller houder wordt met vier pinnen op het frame vastgezet De controller zelf past over de vier pinnen op deze houder Hiernaast het frame waarin de ultrasoon sensors worden geplaatst Ze passen er klemmend in, verder geen bevestiging nodig Na het printen kunnen ongelijkheden, losse filamentdraadjes etc het nodig maken met een vijltje, wat schuurpapier en/of een klein boortje de componenten bij te werken Neem daar rustig de tijd voor Het kan zijn dat een vernieuwde versie van een onderdeel in het pakket is opgenomen De illustratie kan daardoor afwijken 3 Elektronische componenten met bestelinformatie Alles is gekocht bij Banggood, dat de spullen voordelig, zonder verzendkosten levert Houdt per bestelling het bedrag onder de 21,- Daarboven heft de douane een forse toeslag Bestel alles in kleinere pakketjes, er zijn toch geen verzendkosten De genoemde prijzen zijn van september 2017 Ze kunnen zijn gewijzigd Bestel door op de link naast de afbeelding te klikken Je komt dan op het bestelscherm De afleveringstijd kan lang zijn: tot wel 4 weken 2x Ultrasoon x Motor Drive x Processor x batterij


 4 Montage elektronica Als de mechanische onderdelen gemonteerd zijn kunnen de elektronische")
5 1x batterij clp x Motor N20/30rmp/6v x converter 9->5V x Logic Level Dus de volgende tips: tip 1: Bestel niet meer dan voor 21,- per bestelling (belasting er boven is direct 18,-) tip 2: Als je meer sets wil kopen vaak extra korting vanaf 3 of meer tip 3: Let op dat de verzekering niet aan staat bij de bestelling (extra kosten tellen ook mee bij tip 1) tip 4: Let op dat tracking niet aan staat bij de bestelling extra kosten tellen ook mee voor bedrag tip 1) 4 Montage elektronica Als de mechanische onderdelen gemonteerd zijn kunnen de elektronische componenten worden toegevoegd De motors met de keramische condensators van 100 nf (code 104) en de aansluitdraden zijn al op hun plaats De Converter en de Logic Level kunnen op hun plek komen op de Controllerhouder Bij het bedraden opletten: haal de spanning af van het apparaat als je de schakeling verandert 5

6 Er worden voorbewerkte, gekleurde draadjes gebruikt Deze horen bij het kleinmateriaal, dat beschikbaar wordt gesteld Er zijn verschillende soorten: mannetje-mannetje, mannetjevrouwtje en vrouwtje-vrouwtje Kijk steeds of je een aansluiting met pen of gat moet maken Mannetjes, Male of Vrouwtjes, Female Neem ook de volgende gewoonte over: Massa, aarde, GND: zwarte draden en voedingsspanning, VC en VCC: rode draadjes In heel de wereld wordt dit gedaan en het vergemakkelijkt wijzigen, uitbreiden en storingzoeken De bedrading van de functies kun je het best doen als je die functie gaat programmeren 5 De Laptop voorbereiden Onmisbaar voor een roboteer en robotenster is een laptop Daar hoeven geen zware eisen aan te worden gesteld Een smartphone of tablet is echter niet geschikt Een IDE moet worden geïnstalleerd en ingericht voor het juiste processor-board De juiste USB-poort worden geactiveerd Installeer de Arduino-IDE als volgt op je computer Ga naar de website Zoek de tab: download Rechts staat voor de verschillende operating systems van je computer het op te halen programma( Windows, Apple) Download en installeer Na de installatie komt het icoon van Arduino, de op zijn kant liggende 8 op je beeldscherm Dubbelklik erop en je krijgt het standaard Arduino-scherm Onder Hulpmiddelen worden het gebruikte board en de USB-poort ingesteld Kijk maar even na en constateer dat het door ons gebruikte board ESP8266 niet genoemd wordt Dit is geen Arduino-board, zoals bijvoorbeeld de Uno, de Micro of de Nano Ons board moet apart worden toegevoegd Kies onder Bestand/Voorkeuren en kopieer naar Additionele Bordenbeheerder Sluit af met OK 6
 Ga dan naar:")
 De download is een zip bestand: CP210x_Windows_Driverszip Na unzip, maak hier een keuze voor 32 of 64 bit systeem: CP210xVCPInstaller_x64exe, of CP210xVCPInstaller_x86exe en voer dat uit")
7 Nu nog onder Hulpmiddelen/Board (bovenaan te vinden) /Boardbeheerder/ Node MCU 10 ESP-12E Module zoeken klikken en OK Tenslotte Sluiten Onder Apparaatbeheer van het Windows-systeem moet nog de juiste USB-driver worden opgehaald Afhankelijk van de maker van de chip moet een andere driver worden geïnstalleerd Eerst de chip van Silicon Labs, de CP202 met de vierkante chip (zie figuur) Ga dan naar: Kies hier voor een besturingsysteem in de meeste gevallen dit: Windows 7/8/81/10D Download VCP (53 MB) (Default) De download is een zip bestand: CP210x_Windows_Driverszip Na unzip, maak hier een keuze voor 32 of 64 bit systeem: CP210xVCPInstaller_x64exe, of CP210xVCPInstaller_x86exe en voer dat uit Wanneer de Node MCU via USB wordt aangesloten zul je nu in de Device Manager van Windows het nieuwe COM poort nummer vinden Welke dan in de Arduino IDE moet worden aangevinkt Wanneer er op de Node MCU een rechthoekige chip bij de USB aansluiting zit heeft men te maken met een chip van FTDI, de benodigde driver is de ch340 Ga dan naar: Kies hier de juiste download voor een 32 of 64 bit systeem: DriverToolkitInstallerexe Na download dit exe bestand draaien Wanneer de Node MCU via USB wordt aangesloten zul je nu in de Device Manager van Windows het nieuwe COM poort nummer vinden Welke dan in de Arduino IDE moet worden aangevinkt Dit was even een secuur werkje Maar je kunt nu de installatie testen met een sketch (zo heet het programma in Arduino), die je kunt ophalen Wees voorzichtig met je board Vermijd kortsluiting Geen metalen voorwerpen in contact brengen met het plaatje Hanteer het printplaatje door het aan de zijkanten te pakken En als je wat verandert aan de schakeling, haal dan de spanning van het board Bijvoorbeeld door de USB-steker uit de laptop te halen Handig is de regelnummers te laten zien: Bestand / Voorkeuren Vakje aanvinken Is het ESP8266-board aangesloten met de juiste Micro-USB-kabel? Knippert een LED-lampje op het board? Die LED is aangesloten op punt 16 van de processor Nu kun je dus beginnen 7
8 6 Sketch Bij Arduino wordt het programma een Sketch genoemd De programmeertaal is C++ Haal onder Bestand / Voorbeelden / Basics / Blink op Dit korte programma is heel interessant om je installatie te testen De tekst tussen /* en */ maakt geen deel uit van de sketch, het is informatie van de programmeur Ook de tekst op een regel na // is alleen maar toelichting Als je aan het programmeren bent kun je zelf ook aantekeningen over de sketch op deze manier vermelden Is handig als je later nog eens naar de sketch kijkt Dus deze info maakt geen deel uit van het programma Het programma bestaat uit 3 delen: Eerste deel: Hierin worden de gebruikte aansluitingen, poorten geheten, van de Arduino genoemd en van een naam voorzien Bijvoorbeeld: LED-lamp op aansluiting 16: const int LEDlamp = 16; Het tweede deel: void setup() begint met een accolade en eindigt met een accolade Daartussen wordt voor elke gebruikte aansluiting vermeld of die als OUTPUT of als INPUT wordt gebruikt OUTPUT wil zeggen, dat de Arduino een signaal stuurt, waardoor bijvoorbeeld een LED kan gaat branden of juist uit gaan INPUT kun je verwachten van een sensor, als het programma wil weten wat die ziet Het programma vraagt er dan naar Soms wordt de informatie van delen een en twee gecombineerd in deel twee Het derde deel is het programma De ESP8266 weet nu welke aansluitingen meedoen en hoe Dus kan de processor aan de gang bij: void loop() Dit is een loop, een lus, die telkens opnieuw doorlopen wordt Voor de laatste accolade begint het programma opnieuw Bekijk de sketch onder loop nauwkeuriger Begrijp je wat er gebeurt? Aansluitpunt 16 wordt HIGH geschakeld De LED gaat aan Daarna wordt er bij delay(500); 500 millisec gewacht Daarna wordt punt 16 LOW gemaakt De LED gaat uit Ook weer gedurende 500 ms: delay(500); En dan wordt er naar boven gesprongen en begint dit opnieuw: de loop doet dat Enz, enz, enz Test nu zelf of dit klopt Verander in de sketch de vertragingen, bijvoorbeeld in 100 en 700 De nieuwe sketch laden in de processor door op de pijl naar rechts te klikken (bovenin scherm IDE) Wat doet de LED? Probeer meer mogelijkheden 8
9 7 Motortest De volgende test betreft de aandrijvingen links en rechts We werken met Gearmotors De gear is de vertragingskast, die het hoge toerental verlaagt en tegelijkertijd het geleverde koppel verhoogt Er zijn verschillende versies Wij kozen voor een toerental van 30 omw/min Over de aansluitingen van de motors moet van te voren ter beveiliging van de gevoelige elektronica tegen vonkjes in de motor een keramische condensator van 100 nf worden gesoldeerd Ook de aansluitdraden bevestigen voor de motors worden geïnstalleerd De motors worden in de zijkant van het frame geschoven Ze worden aangesloten op de motor drive (H-brug) op de punten A+ en A- voor de linker motor en B+ en B- voor de rechter motor De vier andere aansluitingen betreffen twee keer GND, massa, aan te sluiten op de min van de batterij en VM voor de motorspanning en VIN, waarvan de 3,3 V elektronica-spanning wordt gemaakt Beide laatsten kunnen worden aangesloten op de voedingsspanning van de batterij De aansluitingen van de processor naar de motordrive gebeuren intern, zodanig als aangegeven in de sketch hieronder Voor elke motor worden de Draairichting en de Snelheid geprogrammeerd In de sketch hieronder is tevens te zien welke aansluitingen voor de sensors zijn gereserveerd Dat is handig om dat van te voren uit te zoeken Kom je later niet voor verrassingen te staan Omdat voor de test beide motors alleen maar vooruit rijden is de draairichting van de motors buiten de loop opgenomen Mocht de draairichting de verkeerde kant op zijn, dan kun je ofwel de draadjes op de Motor Drive omkeren, ofwel, softwarematig, voor de bedoelde motor HIGH veranderen in LOW in de volgende regels: digitalwrite(0, HIGH); digitalwrite(2, HIGH); Je kunt de sketch selecteren, kopiëren en plakken in de Arduino-IDE Zie je dat de C++ commando' s gekleurd worden vermeld? Let op Hoofd en kleine letters Sluit elke regel af met of ; Dat ga je vast veel keer vergeten, maar je wordt dan gewaarschuwd, want anders werkt het niet //***************** Motor Shield // //static const uint8_t D0 = 16; //static const uint8_t D1 = 5; //static const uint8_t D2 = 4; //static const uint8_t D3 = 0; //static const uint8_t D4 = 2; //static const uint8_t D5 = 14; //static const uint8_t D6 = 12; //static const uint8_t D7 = 13; //static const uint8_t D8 = 15; //static const uint8_t D9 = 3; //static const uint8_t D10 = 1; #define #define #define #define ****************************************** // Led Op de Print - Vrij als I/0 te gebruiken // Motor Uitvoer Snelheid A // Motor Uitvoer Snelheid B // Motor Uitvoer Voor/Achter A+ // Motor Uitvoer Voor/Achter B+ // Ping Sensor 1 Trigger // Ping Sensor 1 Echo // Ping Sensor 2 Trigger // Ping Sensor 2 Echo TRIGGER_PIN_L 14 ECHO_PIN_L 12 TRIGGER_PIN_R 13 ECHO_PIN_R 15 void setup() pinmode(d1, pinmode(d2, pinmode(d3, pinmode(d4, pinmode(d5, pinmode(d6, OUTPUT); OUTPUT); OUTPUT); OUTPUT); OUTPUT); INPUT); 9
; analogwrite(5, i); delay (1); for (int i=1023; i>=0 ; i--) // Snelheid motor van hoog naar laag analogwrite(4, i); analogwrite(5, i); delay (1);")
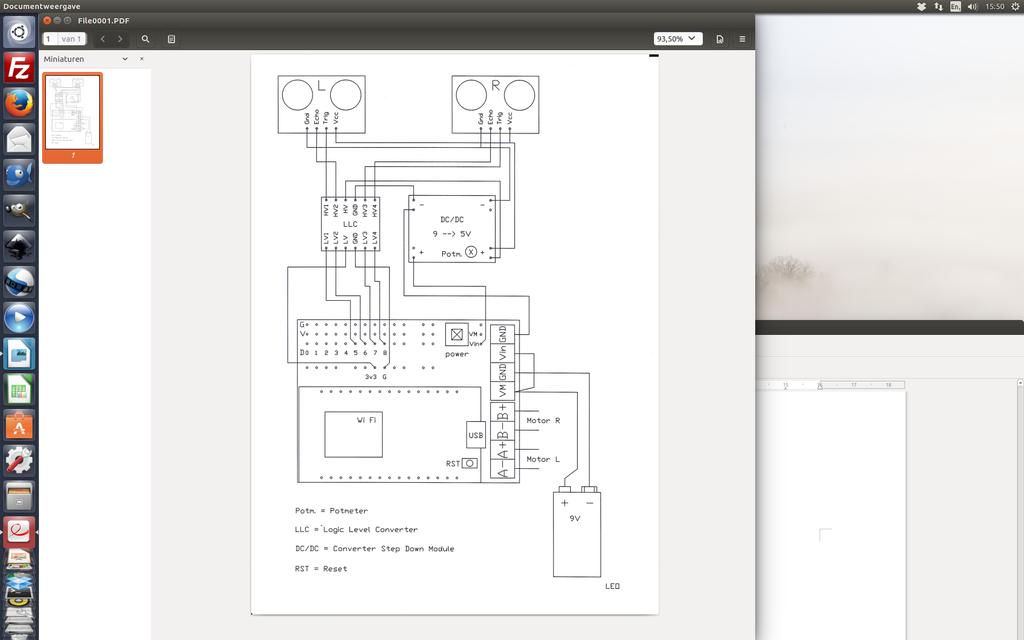
10 pinmode(d7, OUTPUT); pinmode(d8, INPUT); digitalwrite(0, HIGH); digitalwrite(2, HIGH); // Motor Richting instellen // Blijft ongewijzigd tijdens deze test void loop() for (int i=0; i<=1023 ; i++) // Snelheid motor van laag naar hoog analogwrite(4, i); analogwrite(5, i); delay (1); for (int i=1023; i>=0 ; i--) // Snelheid motor van hoog naar laag analogwrite(4, i); analogwrite(5, i); delay (1); Begrijp je de code in de loop? Dan weet je wat je kunt verwachten Je kunt de acties van je robot stoppen door de schakelaar uit te zetten 8 De Sensor programmeren De Pingsensors verlangen een voedingsspanning van 5 V Ook de signalen van de trigger en de echo zijn op basis van 5 V Onze processor werkt op 3,3 V en kan niet tegen de 5V Daarvoor hebben we de Convertor en de Logic Level modules De convertor maakt van de batterijspanning de benodigde 5 V De Logic Level module past de signaalniveaus aan Ze worden als volgt aangesloten 10

11 Let op dat van de logis level comvertor beide aanslluitingen GND zijn aangesloten In de tekening zijn de twee druktoetsen naast de USB-poort gekleurd aangegeven De groene knop is de RESET Die kan helpen ingeval er iets anders gaat dan verwacht De rode knop dient voor de FLASH Dat wil zeggen dat alles wordt gewist en in de oorspronkelijke status wordt gebracht Op het bordje zijn ze niet zo gekleurd Let op: Flash niet per ongeluk indrukken Voor onze eerste robot gebruiken we een Ultrasoon sensor, de Ping-sensor De belangrijkste delen daarvan zijn een luidsprekertje en een microfoontje Die zitten in de metalen rondjes aan de voorkant De luidsprekertjes geven heel kort, een ultrasoon (dus onhoorbaar hoog) toontje, waarna de microfoon wacht tot er geluid wordt teruggekaatst vanaf een in de weg liggend voorwerp De tijdsduur wordt gedeeld door de geluidssnelheid (340 m/s, of 58 us/cm, microsec/cm) en je weet hoe ver het geluid zich heeft moeten verplaatsen Dat is twee keer de afstand tot het voorwerp: heen en terug Bij de voorbeelden van Arduino is een programma voor deze sensor opgenomen Haal het op Ga naar Bestand / Voorbeelden / Sensors / Ping/* Ping))) Sensor Niet helemaal doorlezen, even naar kijken en dan verderop weer lezen Ik vind de uitleg hiervan in het Engels lang en ingewikkeld Deze oorspronkelijke tekst is geldig voor een Ping-sensor met drie aansluitpunten Wij hebben er met vier aansluitpunten De aansluiting Signal is vervangen door twee aparte: Trigger en Echo Dat maakt het programmeren iets eenvoudiger We hoeven de aansluiting SIGN van Signaal, niet telkens om te schakelen van OUTPUT naar INPUT) We zullen gaan werken met 2 sensors voor links, L en rechts, R Eerste deel van de sketch: #define #define #define #define TRIGGER_PIN_L 14 ECHO_PIN_L 12 TRIGGER_PIN_R 13 ECHO_PIN_R 15 // Zie boven bij de motortest 11
12 Verbind dus al deze poorten met de juiste aansluitingen van de sensors Gebruik verschillende kleurtjes draad om de aansluitingen uit elkaar te kunnen houden Sluit ook de 5 V en de GND aan Maar: gebruik zwart voor de massa, aarde, GND en rood voor de VCC, de 5 volt long tijdsduur1, cm1; int ping1cm; int cm; long microseconds; // we zien ze verderop in de loop void setup() Serialbegin(9600); // Zet de Arduino monitor aan PinMode(14, OUTPUT); pinmode(12, INPUT); void loop() digitalwrite(14, LOW); // ook dit is om de sensor even'schoon'te maken, delaymicroseconds(2); // gedurende 2 microseconden digitalwrite(14, HIGH); // Hier sturen we het ultrasoon signaal, delaymicroseconds(5); // gedurende 5 microseconden digitalwrite(14, LOW); tijdsduur1 = pulsein(12,high); // Meten hoelang het toontje onderweg is cm1 = (tijdsduur1 / 58); // en rekenen die tijdsduur om in cm Om te controleren of het goed werkt kun je de seriële monitor inschakelen De seriële monitor kun je vinden rechts op de werkbalk van de IDE Wat tussen staat wordt als tekst gewoon op het beeldscherm getoond Met Serialprint wordt alles achter elkaar getoond Voor een nieuwe regel moet je Serialprintln() kiezen Als je de sketch hebt ge-upload, dan begint het programma meteen te werken Houdt een voorwerp op verschillende afstanden van de Ping-sensor en kijk op de seriële monitor of de afstand gemeten wordt Probeer ook eens te weten te komen hoe hoog het plafond is: Serialprint( Afstand sensor 1: ); Serialprint(cm1); Serialprintln( cm ); delay(100); // hier eindigt de loop en de sketch Ik adviseer niet alle commentaar in te voeren, het is uitleg voor nu Vind je het fijn om later toch uitleg te hebben, maak die dan zelf Het zal een hele klus zijn om alles goed te krijgen Merk op, dat de commando' s in C++ gekleurd op je beeldscherm komen te staan Dan zijn ze goed geschreven Vergeet niet de ; aan het eind van de regels en let op de hoofdletters Voor een tweede sensor moet je alles op eenzelfde manier programmeren Wat een klus In deel een van de sketch moet je daarom aan het al bestaande deel een en ander nog een keer toevoegen voor andere poorten, en dan veel herhalen Probeer te wennen aan kopiëren en plakken Werkt veel sneller Verander na het kopiëren de nummers van de poorten en het nummer van de sensor van het gekopieerde deel Het programma, dat ik verderop toon, houdt rekening met het gebruik van deze poorten Wil je andere gebruiken, dan mag dat natuurlijk Je zult dat dan verderop in de gaten moeten houden 12
13 9 Totaalplaatje We hebben al veel bereikt De Robot is goed in elkaar gezet en alle delen werken naar verwachting De programma s voor de delen tonen dat aan Nu moeten we nog een totaalprogramma maken Om het overzicht te bewaren maken we verschillende functies, blokjes programma, die we apart behandelen De volgende functies gaan we maken: void setup() // Tussen de en komt de code, die een keer wordt verwerkt void loop() // Het hoofddeel van de code, dat telkens opnieuw doorlopen wordt Om de code binnen de loop beperkt, dus overzichtelijk te houden scheiden we een aantal verschillende functies Hiermee bereiken we ook een aantal hapklare brokken in plaats van een lage codelijst meetlinks() // de linkse pingdetector laten meten meetrechts() analyseer() // uit de metingen moeten de gewenste snelheid van de motors worden getrokken rijden() 13
14 Zo wordt het dan: void loop() meetlinks(); meetrechts(); analyseer(); rijden(); Zoals bekend springt het programma terug naar de plek waar het vandaan kwam Dus achtereenvolgens worden de genoemde functies gepasseerd En na rijden wordt opnieuw begonnen met meetlinks Voor meetlinks en meetrechts kan de code uit bladzijde 9 worden gekopieerd en zonodig aangepast voor de juiste aansluitingen Voor rijden bladzijde 8 10 Analyse meetgegevens int analyseer() //Zo heet de functie Tussen de accolades weer het eigenlijke werk Voor analyseer zou het volgende kunnen worden bedacht Als de gemeten afstanden door beide sensors groter zijn dan 12 cm, dan kan naar maximale snelheid worden opgetrokken: if ((cmlinks > 12) && (cmrechts > 12)) digitalwrite(0, HIGH); // beide motors vooruit digitalwrite(2, HIGH); snelheidlinks = constrain((snelheidlinks + 10),30,1023); snelheidrechts = constrain((snelheidrechts + 10),30,1023); Als er links geen en rechts op 8 cm een obstakel bevindt, dan willen we die vermijden door het rechterwiel sneller te laten draaien dan het linker De robot buigt dan weg van het obstakel else if ((cmlinks > 12) && (cmrechts =<8)) digitalwrite(0, HIGH); // beide motors vooruit digitalwrite(2, HIGH); snelheidlinks = constrain((snelheidlinks - 5),30,1023); digitalwrite(0,high); snelheidrechts = constrain((snelheidrechts + 10),30,1023); digitalwrite(2,high); Voor een obstakel op 8 cm links geldt hetzelfde, maar dan aan de andere kant Zelf aanpassen Maar er kan meer: Als er aan een van beide kanten dichtbij een obstakel wordt gemeten, dan moet er steviger worden ingegrepen Verminder de snelheid van de bewuste motor dan met grotere stappen En als er aan beide kanten een obstakel wordt gemeten op korte afstand: laat dan de robot even recht achteruit rijden, een draai maken en dan opnieuw proberen door de loop vanaf het begin weer te laten werken: 14
15 else if ((cmlinks <4) && (cmrechts < 4)) fftrug(); draaien(); En weer de twee functies int fftrug() digitalwrite(0, LOW); digitalwrite(2, LOW); // beide motors achteruit snelheidlinks = 150; snelheid Rechts = 150; draaien() digitalwrite(0, HIGH); // beide motors vooruit digitalwrite(2, HIGH); Snelheid Links = 0; delay(300); // draaien door de linkermotor gedurende 300 msec stil te zetten rijden(); Op deze manier programmeer je in hapklare brokken De getallen kunnen worden veranderd naar behoefte Tenslotte de functie rijden: void rijden() analogwrite(5,snelheidlinks); // voor linkerwiel analogwrite(4,snelheidrechts); Aangenomen wordt dat de draairichtingen van de linker en rechter motor zo goed zijn Anders moeten HIGH en LOW worden omgeruild Ook kun je uiteraard de draadjes van de motor omwisselen In de totaalschets hierna is ook de in de IDE ingebouwde Monitor geprogrammeerd Die werkt goed wanneer de USB-kabel naar de laptop alsook de voeding van de batterij (witte power knopje) is ingeschakeld 15
16 11 Complete sketch //***************** Complete sketch WARBA BOT besturing OBJECT ONTWIJKEN ****************************************** // //static const uint8_t D0 = 16; // Led Op de Print - Vrij als I/0 te gebruiken //static const uint8_t D1 = 5; // Motor Uitvoer Snelheid A //static const uint8_t D2 = 4; // Motor Uitvoer Snelheid B //static const uint8_t D3 = 0; // Motor Uitvoer Voor/Achter A+ //static const uint8_t D4 = 2; // Motor Uitvoer Voor/Achter B+ //static const uint8_t D5 = 14; // Ping Sensor 1 Trigger //static const uint8_t D6 = 12; // Ping Sensor 1 Echo //static const uint8_t D7 = 13; // Ping Sensor 2 Trigger //static const uint8_t D8 = 15; // Ping Sensor 2 Echo //static const uint8_t D9 = 3; //static const uint8_t D10 = 1; //definieert constanten #define TRIGGER_PIN_L 14 #define ECHO_PIN_L 12 #define TRIGGER_PIN_R 13 #define ECHO_PIN_R 15 #define maximale_snelheid 1023 #define minimale_snelheid 50 #define achteruit_tijdsduur 500 #define achteruit_snelheid 500 // Motor Shield NodeMCU DevKit GPIO Purpose //D1 PWMA (Motor A) D1 5 Speed //D3 DIRA (Motor A) D3 0 Direction //D2 PWMA (Motor B) D2 4 Speed //D4 DIRB (Motor B) D4 2 Direction =LED // motor A #define DIRA 0 #define PWMA 5 //motor B #define DIRB 2 #define PWMB 4 // draairichting // snelheid #define US_ROUNDTRIP_CM 58 // tijdsduur voor pinger #define DELTA_SNELHEID 50 // snelheidsverhoging/-verlaging bij obstakels // definieer globale variabelen long tijdsduur; long cmlinks; long cmrechts; int snelheidlinks; int snelheidrechts; int rij_situatie = 0; // 1=vrije baan 2=rechts obstakel 3=links obstakel 4=botsing int motor_fudge = -1; // waarde om de wielen op gelijke snelheid te laten draaien unsigned long StartTime; long microseconds; // we zien ze verderop in de loop void setup() Serialbegin(115200); // Zet de seriele Arduino monitor aan 16
17 //uitgangspinnen zetten, gebruik arduino-pinnummering!!1 pinmode(trigger_pin_l, OUTPUT); pinmode(echo_pin_l, INPUT); pinmode(trigger_pin_r, OUTPUT); pinmode(echo_pin_r, INPUT); pinmode(pwma, OUTPUT); pinmode(pwmb, OUTPUT); pinmode(dira, OUTPUT); pinmode(dirb, OUTPUT); StartTime = millis(); void loop() meetlinks(); meetrechts(); analyseer(); report(); // allerhande functies void meetlinks(void) digitalwrite(trigger_pin_l, LOW); // ook dit is om de sensor even'schoon'te maken, delaymicroseconds(2); // gedurende 2 microseconden digitalwrite(trigger_pin_l, HIGH); // Hier sturen we het ultrasoon signaal, delaymicroseconds(5); // gedurende 5 microseconden digitalwrite(trigger_pin_l, LOW); tijdsduur = pulsein(echo_pin_l, HIGH); // Meten hoelang het toontje onderweg is cmlinks = (tijdsduur / US_ROUNDTRIP_CM); // en reken die tijdsduur om in cm void meetrechts(void) digitalwrite(trigger_pin_r, LOW); // ook dit is om de sensor even'schoon'te maken, delaymicroseconds(2); // gedurende 2 microseconden digitalwrite(trigger_pin_r, HIGH); // Hier sturen we het ultrasoon signaal, delaymicroseconds(5); // gedurende 5 microseconden digitalwrite(trigger_pin_r, LOW); tijdsduur = pulsein(echo_pin_r, HIGH); // Meten hoelang het toontje onderweg is cmrechts = (tijdsduur / US_ROUNDTRIP_CM); // en reken die tijdsduur om in cm void analyseer(void)//analyse en motor sturing if ((cmlinks > 12) && (cmrechts > 12))// vrije baan snelheidlinks = constrain((snelheidlinks + DELTA_SNELHEID), minimale_snelheid, maximale_snelheid); snelheidrechts = constrain((snelheidrechts + DELTA_SNELHEID), minimale_snelheid, maximale_snelheid); twowd_motor_drive(snelheidrechts, snelheidlinks); rij_situatie = 1; else if ((cmlinks > 12) && (cmrechts < 12)) // als rechts een obstakel dichterbij is, dan naar links afbuigen snelheidlinks = constrain((snelheidlinks - DELTA_SNELHEID), minimale_snelheid, maximale_snelheid); snelheidrechts = constrain((snelheidrechts + DELTA_SNELHEID), minimale_snelheid, maximale_snelheid); twowd_motor_drive(snelheidrechts, snelheidlinks); rij_situatie = 2; else if ((cmlinks < 12) && (cmrechts > 12)) // als links een obstakel dichterbij is, dan naar rechts afbuigen snelheidlinks = constrain((snelheidlinks +DELTA_SNELHEID), minimale_snelheid, maximale_snelheid); snelheidrechts = constrain((snelheidrechts - DELTA_SNELHEID), minimale_snelheid, maximale_snelheid); twowd_motor_drive(snelheidrechts, snelheidlinks); rij_situatie = 3; else if ((cmlinks < 4) && (cmrechts < 4)) 17
18 // huh botsing??? rij een beetje achteruit en dan draai wat snelheidlinks = -achteruit_snelheid; snelheidrechts = -achteruit_snelheid; twowd_motor_drive(snelheidrechts, snelheidlinks); delay(achteruit_tijdsduur); snelheidlinks = 0; snelheidrechts = achteruit_snelheid; twowd_motor_drive(snelheidrechts, snelheidlinks); delay(achteruit_tijdsduur); rij_situatie = 4; void twowd_motor_drive(int leftx, int rightx)// besturing voor twee motoren if (leftx < 0) move(0, abs(leftx), 1); else if (leftx >= 0) move(0, (leftx), 0); if (rightx < 0) move(1, abs(rightx), 1); else if (rightx >= 0) move(1, rightx, 0); void move(int motor, int speed, int direction)// H-brug aansturing // special for nodemcu L298 double H-bridge //Move specific motor at speed and direction //motor: 0 for B, 1 for A //speed: 0 is off, and 1023 is full speed //direction: 0 clockwise, 1 counter-clockwise if (motor == 1) if (direction == 1) digitalwrite(dira, LOW); else digitalwrite(dira, HIGH); if (speed == 0) analogwrite(pwma, speed); //no fuzz factor else analogwrite(pwma, speed + motor_fudge); else if (direction == 1) digitalwrite(dirb, LOW); else 18
19 digitalwrite(dirb, HIGH); analogwrite(pwmb, speed); // rapporteer de waardes void report(void) unsigned long CurrentTime = millis(); unsigned long ElapsedTime = CurrentTime - StartTime; StartTime = millis(); Serialprint("actuele waardes: verlopen tijd afstand rechts afstand links motor snelheid rechts motor snelheid links rij modus"); Serialprintln(""); Serialprint(" "); Serialprint(ElapsedTime); Serialprint(" "); Serialprint(cmRechts); Serialprint(" "); Serialprint(cmLinks); Serialprint(" "); Serialprint( snelheidrechts); Serialprint(" "); Serialprint(snelheidLinks); Serialprint(" "); Serialprint(rij_situatie); Serialprint(" : "); if (rij_situatie == 1) Serialprint("vrije baan"); else if (rij_situatie == 2) Serialprint("obstakel rechts"); else if (rij_situatie == 3) Serialprint("obstakel links"); else if (rij_situatie == 4) Serialprint("bijna botsing"); Serialprintln(""); 19
20 12 Verdere mogelijkheden De gebouwde robot vertoont obstakelmijdend gedrag: obstakels worden vermeden De hardware van de robot is ook geschikt om er vrij eenvoudig een lijnvolger van te maken Alleen de optisch sensors moeten worden aangeschaft en geïnstalleerd en geprogrammeerd Een nieuwe uitdaging! De ESP8266 heeft WiFi aan boord Bedenk wat daarmee weer mogelijk is Afstandsbesturing met je Smartphone? 13 Studiemateriaal Kijk regelmatig op de site van Robotics-CCFZ voor een nieuwe versie van deze Handleiding Deze versie is zorgvuldig geredigeerd, maar kan best verbeteringen gebruiken Opmerkingen worden op prijs gesteld en zorgvuldig overwogen Veel informatie over de IDE van Arduino, over nuttige hulpmiddelen en gereedschappen en het programmeren vind je in Arduino voor Dummies Maar er is veel meer op Internet te vinden Speciaal voor de gebruikte processor ESP8266 is hieronder een overzicht opgenomen Een aantal ervan is voor gevorderden, maar ook voor beginners is er veel bruikbaars te vinden Hierbij een aantal ESP8266 links 1- algemene esp site, erg goed 2- < nodemcu site 3- < esp explore site download explorer: < 4-mijn arduino boardmanager: < < paste in arduino ide: preferences: boardmanager package 5- < esp wiki 6- < esp flasher utility 7- < Er is ook een ESP Basic programmeertaal beschikbaar: 20

21 14 Technische informatie 21
22 22
23 23
MAKERKLAS WORKSHOP ARDUINO. Maandag 7 december 2015
 1 MAKERKLAS WORKSHOP ARDUINO Maandag 7 december 2015 2 AAN DE SLAG! ONDERDELEN Je hebt de beschikking over een Arduino Starter Kit met een heleboel onderdelen. We gaan ze in de ze workshop niet allemaal
1 MAKERKLAS WORKSHOP ARDUINO Maandag 7 december 2015 2 AAN DE SLAG! ONDERDELEN Je hebt de beschikking over een Arduino Starter Kit met een heleboel onderdelen. We gaan ze in de ze workshop niet allemaal
Boe-Bots - Arduino robots
 Boe-Bots - Arduino robots Voorbereiding - wat hebben we allemaal nodig? 1) Een laptop met de Arduino IDE 2) Een Boe-Bot 3) Een USB printerkabel 4) De Boe Bot Library én NewPing library. Hier te downloaden.
Boe-Bots - Arduino robots Voorbereiding - wat hebben we allemaal nodig? 1) Een laptop met de Arduino IDE 2) Een Boe-Bot 3) Een USB printerkabel 4) De Boe Bot Library én NewPing library. Hier te downloaden.
Winter Workshop ROBOTBOUW
 Winter Workshop ROBOTBOUW Uitgave 2.0 blz 1. INLEIDING Voor de WINTER WORKSHOP ROBOTBOUW CCFZ 2015 is dit de handleiding. Het maken en programmeren van een robot is geen eenvoudige klus, maar werk rustig
Winter Workshop ROBOTBOUW Uitgave 2.0 blz 1. INLEIDING Voor de WINTER WORKSHOP ROBOTBOUW CCFZ 2015 is dit de handleiding. Het maken en programmeren van een robot is geen eenvoudige klus, maar werk rustig
Workshop Arduino voor beginners. door TkkrLab Enschede
 Workshop Arduino voor beginners door TkkrLab Enschede Tkkrlab TkkrLab (Tukkerlab) bestaat uit een groep mensen die geïnteresseerd zijn in in technologie, digitale techniek en wetenschap, kortom geeks.
Workshop Arduino voor beginners door TkkrLab Enschede Tkkrlab TkkrLab (Tukkerlab) bestaat uit een groep mensen die geïnteresseerd zijn in in technologie, digitale techniek en wetenschap, kortom geeks.
1. Sluit de LED aan zoals afgebeeld 2. Sluit de USB-kabel aan op de Arduino 3. Klik op de knop uploaden 4. De LED begint te knipperen
 Workshop Arduino Inleiding In deze workshop werk je in tweetallen met een Arduino microcontroller. Dit is een kleine computer die je kunt programmeren om te doen wat jij wilt. Om dit te doen gebruik je
Workshop Arduino Inleiding In deze workshop werk je in tweetallen met een Arduino microcontroller. Dit is een kleine computer die je kunt programmeren om te doen wat jij wilt. Om dit te doen gebruik je
Je kunt de mbot ook draadloos programmeren via Bluetooth of met 2.4G Wireless. Bekijk de instructies op mbot draadloos.
 Wat is een mbot? mbot is een robot die je eerst zelf in elkaar moet zetten en daarna kunt programmeren. De programmeer omgeving die je erbij kan installeren is mblock welke lijkt op Scratch 2.0 : mblock
Wat is een mbot? mbot is een robot die je eerst zelf in elkaar moet zetten en daarna kunt programmeren. De programmeer omgeving die je erbij kan installeren is mblock welke lijkt op Scratch 2.0 : mblock
BBR programmeren met Ardublock
 BBR programmeren met Ardublock Robotkamp 2017 www.e2cre8.be VTI Torhout Middenschool Sint-Rembert 1 Motoren Beide motoren kunnen: Vooruit of achteruit draaien Versnellen of vertragen van 0 tot 255 Let
BBR programmeren met Ardublock Robotkamp 2017 www.e2cre8.be VTI Torhout Middenschool Sint-Rembert 1 Motoren Beide motoren kunnen: Vooruit of achteruit draaien Versnellen of vertragen van 0 tot 255 Let
Tweede workshop Arduino
 Tweede workshop Arduino In deze workshop zal veel gewerkt worden met voorbeelden die meegeleverd worden met de Arduino IDE. Deze zijn te vinden onder het menu File >Examples. Oefening 1 - Seriële communicatie
Tweede workshop Arduino In deze workshop zal veel gewerkt worden met voorbeelden die meegeleverd worden met de Arduino IDE. Deze zijn te vinden onder het menu File >Examples. Oefening 1 - Seriële communicatie
Gebruikershandleiding. robotcar.nl
 Gebruikershandleiding robotcar.nl Inhoudsopgave 1 Introductie 2 2 Inventaris 3 3 Uno: een Arduino variant 4 3.1 De pinnen op het Uno board.................... 4 3.2 De Arduino software omgeving...................
Gebruikershandleiding robotcar.nl Inhoudsopgave 1 Introductie 2 2 Inventaris 3 3 Uno: een Arduino variant 4 3.1 De pinnen op het Uno board.................... 4 3.2 De Arduino software omgeving...................
De Arduino-microcontroller in de motorvoertuigentechniek (6)
") De Arduino-microcontroller in de motorvoertuigentechniek (6) E. Gernaat (ISBN 978-90-79302-11-6) 1 De Arduino Programmeeromgeving (IDE) 1.1 Inleiding Als we naar de Arduino site gaan kunnen we daar de
De Arduino-microcontroller in de motorvoertuigentechniek (6) E. Gernaat (ISBN 978-90-79302-11-6) 1 De Arduino Programmeeromgeving (IDE) 1.1 Inleiding Als we naar de Arduino site gaan kunnen we daar de
Programmeren met Arduino-software
 Programmeren met Arduino-software De software waarin we programmeren is Arduino IDE. Deze software is te downloaden via www.arduino.cc. De programmeertaal die hier gebruikt wordt, is gebaseerd op C en
Programmeren met Arduino-software De software waarin we programmeren is Arduino IDE. Deze software is te downloaden via www.arduino.cc. De programmeertaal die hier gebruikt wordt, is gebaseerd op C en
Workshop Arduino - deel 2
 Workshop Arduino - deel 2 Inleiding In het vorige deel van de workshop Arduino heb je voor het eerst kennis gemaakt met deze microcontroller. In dit deel, deel 2, ga je meer leren over de software: het
Workshop Arduino - deel 2 Inleiding In het vorige deel van de workshop Arduino heb je voor het eerst kennis gemaakt met deze microcontroller. In dit deel, deel 2, ga je meer leren over de software: het
Workshop Arduino voor beginners deel 2
 Workshop Arduino voor beginners deel 2 Voor deze workshop is het van belang dat je deel 1 van de workshop hebt afgerond. In deze workshop zitten meerdere opdrachten die elkaar niet allemaal op hoeven te
Workshop Arduino voor beginners deel 2 Voor deze workshop is het van belang dat je deel 1 van de workshop hebt afgerond. In deze workshop zitten meerdere opdrachten die elkaar niet allemaal op hoeven te
Workshop IOT. Handleiding V5 Vincent Verheggen 6 november Taal: Nederlands.
 Workshop IOT Handleiding V5 Vincent Verheggen 6 november 2017 Taal: Nederlands Meer informatie: Contact: www.vincentverheggen.nl/workshop vincent@vincentverheggen.nl Woord vooraf Voor je ligt de handleiding
Workshop IOT Handleiding V5 Vincent Verheggen 6 november 2017 Taal: Nederlands Meer informatie: Contact: www.vincentverheggen.nl/workshop vincent@vincentverheggen.nl Woord vooraf Voor je ligt de handleiding
Oefening 1 - Seriële communicatie via USB
 Werkbladen voor Arduino workshop 2 In deze workshop zal gewerkt worden met de voorbeelden die meegeleverd worden met de Arduino IDE. Deze zijn te vinden onder het menu Bestand->Voorbeelden. Oefening 1
Werkbladen voor Arduino workshop 2 In deze workshop zal gewerkt worden met de voorbeelden die meegeleverd worden met de Arduino IDE. Deze zijn te vinden onder het menu Bestand->Voorbeelden. Oefening 1
Arduino Cursus, Deel 2 Programmeren. Simon Pauw, ZB45, Amsterdam
 Arduino Cursus, Deel 2 Programmeren Simon Pauw, ZB45, Amsterdam Programmeren Geen zorgen als je niet alles begrijpt. Doel: Het snappen van bestaande code. Meeste kennis ook toepasbaar buiten de Arduino
Arduino Cursus, Deel 2 Programmeren Simon Pauw, ZB45, Amsterdam Programmeren Geen zorgen als je niet alles begrijpt. Doel: Het snappen van bestaande code. Meeste kennis ook toepasbaar buiten de Arduino
Arduino. Workshop. 20 juni 2014 Peter Struwe Stichting De Jonge Onderzoekers Groningen
 Arduino Workshop Beta-docentendag 20 juni 2014 Peter Struwe Stichting De Jonge Onderzoekers Groningen Wat is een microcontroller? Maak een computer met alleen het meest noodzakelijke: processor geheugen
Arduino Workshop Beta-docentendag 20 juni 2014 Peter Struwe Stichting De Jonge Onderzoekers Groningen Wat is een microcontroller? Maak een computer met alleen het meest noodzakelijke: processor geheugen
Arduino[4KIDS] Maak je eigen muziekinstrument!
![Arduino[4KIDS] Maak je eigen muziekinstrument!](/thumbs/27/11322858.jpg "Arduino[4KIDS] Maak je eigen muziekinstrument!") Arduino[4KIDS] Maak je eigen muziekinstrument! Wat is een Arduino? Open jullie doos! Hierin vind je: Wat is een Arduino? Er gaat slechts één 'programma' op Dit gaat via de USB ingang, met de USB kabel:
Arduino[4KIDS] Maak je eigen muziekinstrument! Wat is een Arduino? Open jullie doos! Hierin vind je: Wat is een Arduino? Er gaat slechts één 'programma' op Dit gaat via de USB ingang, met de USB kabel:
Naam + Klas: Laptop Nr: Cijfer:
 Naam + Klas: Laptop Nr: Cijfer: Les 1a: 1: Verander de aan - en uit tijden in de sketch en bekijk het resultaat. 2: Je hebt 14 (0 t/m 13) digitale pinnen ter beschikking om je ledje op aan te sluiten.
Naam + Klas: Laptop Nr: Cijfer: Les 1a: 1: Verander de aan - en uit tijden in de sketch en bekijk het resultaat. 2: Je hebt 14 (0 t/m 13) digitale pinnen ter beschikking om je ledje op aan te sluiten.
Accelerometer project 2010 Microcontroller printje op basis van de NXP-LPC2368
 Accelerometer project 2010 Microcontroller printje op basis van de NXP-LPC2368 Handleiding bij het gebruik van een microcontroller in het Accelerometerproject (Project II) Er zijn speciaal voor het Accelerometerproject
Accelerometer project 2010 Microcontroller printje op basis van de NXP-LPC2368 Handleiding bij het gebruik van een microcontroller in het Accelerometerproject (Project II) Er zijn speciaal voor het Accelerometerproject
Arduino CURSUS. door Willy - 09-juni-2017
 Arduino CURSUS door Willy - w2@skynet.be, 09-juni-2017 OVERZICHT (1) OVERZICHT (2) Historiek Microcontroller (1) Microcontroller (2) Specificaties - Arduino UNO bord Specificaties - ATmega328P chip LET
Arduino CURSUS door Willy - w2@skynet.be, 09-juni-2017 OVERZICHT (1) OVERZICHT (2) Historiek Microcontroller (1) Microcontroller (2) Specificaties - Arduino UNO bord Specificaties - ATmega328P chip LET
Technologie. Bluetooth gebruiken
 Bluetooth is communicatietechnologie die het mogelijk maakt data te versturen en te ontvangen zonder leidingen of kabels. Met de Bluetooth features kun je een draadloze verbinding maken tussen je NXT en
Bluetooth is communicatietechnologie die het mogelijk maakt data te versturen en te ontvangen zonder leidingen of kabels. Met de Bluetooth features kun je een draadloze verbinding maken tussen je NXT en
Bouw je eigen minicomputer
 Bouw je eigen minicomputer Soldeer stap-voor-stap de Diavolino, een open-source computerplatform 1 1 2 3 Je hebt nodig: kniptang, soldeerbout, soldeerdraad, batterijhouder, Diavolino kit van Evil Mad Scientist:
Bouw je eigen minicomputer Soldeer stap-voor-stap de Diavolino, een open-source computerplatform 1 1 2 3 Je hebt nodig: kniptang, soldeerbout, soldeerdraad, batterijhouder, Diavolino kit van Evil Mad Scientist:
Bouw je eigen minicomputer
 Soldeer stap-voor-stap de Fabschoolino, een open source Arduino. 1 2 3 Je hebt nodig: soldeerbout, soldeersel, batterijhouder, Fabschoolino board (het PCB, ATMEGA 328P (ic) en de losse componenten + beschrijving
Soldeer stap-voor-stap de Fabschoolino, een open source Arduino. 1 2 3 Je hebt nodig: soldeerbout, soldeersel, batterijhouder, Fabschoolino board (het PCB, ATMEGA 328P (ic) en de losse componenten + beschrijving
Wonderfoon. Bouwbeschrijving en gebruikshandleiding. Ivo Schooneman - 3 mei 2019 WONDERFOON BOUWBESCHRIJVING EN GEBRUIKSHANDLEIDING 1
 Wonderfoon Bouwbeschrijving en gebruikshandleiding Ivo Schooneman - 3 mei 2019 WONDERFOON BOUWBESCHRIJVING EN GEBRUIKSHANDLEIDING 1 Hoe bouw je een Wonderfoon? Een Wonderfoon is een oud jaren 60 toestel
Wonderfoon Bouwbeschrijving en gebruikshandleiding Ivo Schooneman - 3 mei 2019 WONDERFOON BOUWBESCHRIJVING EN GEBRUIKSHANDLEIDING 1 Hoe bouw je een Wonderfoon? Een Wonderfoon is een oud jaren 60 toestel
Elektor Uno R4 Installatie & Test
 Elektor Uno R4 Installatie & Test Vereisten Elektor Uno R4 Kabel USB-A naar micro-b Computer met Windows (XP of later), Linux of OSX (10.7 of later) Arduino IDE 1.6.7 of recenter (niet 1.6.8) We raden
Elektor Uno R4 Installatie & Test Vereisten Elektor Uno R4 Kabel USB-A naar micro-b Computer met Windows (XP of later), Linux of OSX (10.7 of later) Arduino IDE 1.6.7 of recenter (niet 1.6.8) We raden
Het kiezen van een kleur of veranderen daarvan gaat eenvoudig door het swipen met een vinger op de toets van een afstandbediening.
 Handleiding voor RGBWW 2.4G RF: Uitleg: RGBWW zijn de multifunctionele LED verlichting welke dimbaar is, de verzadiging is te wijzigen, alle kleuren van de regenboog en nog vele meer zijn te kiezen en
Handleiding voor RGBWW 2.4G RF: Uitleg: RGBWW zijn de multifunctionele LED verlichting welke dimbaar is, de verzadiging is te wijzigen, alle kleuren van de regenboog en nog vele meer zijn te kiezen en
TIPS EN HINTS VOOR BEGINNERS. Klik nu in de Menu balk op het menu item ELEMENT. Onder het woord Element gaat er nu vervolgens nu een sub menu open
 ........................................ TIPS EN HINTS VOOR BEGINNERS.................................................... Nadat u WinRail 8 heeft geïnstalleerd krijgt u automatisch een leeg werkblad waarop
........................................ TIPS EN HINTS VOOR BEGINNERS.................................................... Nadat u WinRail 8 heeft geïnstalleerd krijgt u automatisch een leeg werkblad waarop
INHOUD. 1. DOEL p SOFTWARE p WORKFLOW p EXTRA p TROUBLESHOOT p Arduino 2.2. Pronterface 2.3. Slic3r 2.4.
 Handleiding Prusa INHOUD 1. DOEL p 2 2. SOFTWARE p 2 2.1. Arduino 2.2. Pronterface 2.3. Slic3r 2.4. Firmware 3. WORKFLOW p 3 3.1. Je file voorbereiden 3.2. Je file naar de printer sturen 4. EXTRA p 5 4.1.Nulpunt
Handleiding Prusa INHOUD 1. DOEL p 2 2. SOFTWARE p 2 2.1. Arduino 2.2. Pronterface 2.3. Slic3r 2.4. Firmware 3. WORKFLOW p 3 3.1. Je file voorbereiden 3.2. Je file naar de printer sturen 4. EXTRA p 5 4.1.Nulpunt
Wat is Arduino? Arduino = microprocessor (Atmel)
") Intro tot Arduino Wat is Arduino? Volgens de website: Arduino is an open-source electronics prototyping platform based on flexible, easy-to-use hardware and software. It's intended for artists, designers,
Intro tot Arduino Wat is Arduino? Volgens de website: Arduino is an open-source electronics prototyping platform based on flexible, easy-to-use hardware and software. It's intended for artists, designers,
AVR-DOPER MINI ASSEMBLAGE HANDLEIDING + LAYOUT. Geschreven door: Tom Vocke
 AVR-DOPER MINI ASSEMBLAGE HANDLEIDING + LAYOUT Geschreven door: Tom Vocke Datum: 28-09-2010 Inleiding: Dit document bevat alle hardware informatie betreffende de AVR-Doper mini. Het eerste deel zal zich
AVR-DOPER MINI ASSEMBLAGE HANDLEIDING + LAYOUT Geschreven door: Tom Vocke Datum: 28-09-2010 Inleiding: Dit document bevat alle hardware informatie betreffende de AVR-Doper mini. Het eerste deel zal zich
Robotica & programmeren
 Robotica & programmeren 1 Inhoudsopgave -Waarom heb ik voor dit onderwerp gekozen?...1 -Hoofdvraag en deelvragen...2 -Is een Raspberry Pi of Arduino beter voor robotica?...3 -De onderdelen van de laatste
Robotica & programmeren 1 Inhoudsopgave -Waarom heb ik voor dit onderwerp gekozen?...1 -Hoofdvraag en deelvragen...2 -Is een Raspberry Pi of Arduino beter voor robotica?...3 -De onderdelen van de laatste
Installeren van de Arduino programmeer omgeving
 Installeren van de Arduino programmeer omgeving Voor het programmeren van de Arduino maakt het niet uit welk besturingssysteem je gebruikt. Je kunt het downloaden voor Windows, OS X en Linux. Op deze link
Installeren van de Arduino programmeer omgeving Voor het programmeren van de Arduino maakt het niet uit welk besturingssysteem je gebruikt. Je kunt het downloaden voor Windows, OS X en Linux. Op deze link
Handleiding NodeMCU. Handleiding NodeMCU l Pagina 1
 Handleiding NodeMCU - Uploaden ESPEasy firmware - Configureren voor thuisnetwerk - Configureren algemeen - Configureren voor gebruik serial server o Opentherm instellingen o P1 meter instellingen o Arduino
Handleiding NodeMCU - Uploaden ESPEasy firmware - Configureren voor thuisnetwerk - Configureren algemeen - Configureren voor gebruik serial server o Opentherm instellingen o P1 meter instellingen o Arduino
Workshop Engino. 1 Aanvang workshop. 2 Bouwen. 1.1 Wat kan ik voor de workshop doen?
 Workshop Engino 1 Aanvang workshop 1.1 Wat kan ik voor de workshop doen? Zorg dat je voldoende opgeladen batterijen hebt voor de ERP s (6 per ERP). Zorg dat de zes engino dozen aanwezig zijn in het lokaal.
Workshop Engino 1 Aanvang workshop 1.1 Wat kan ik voor de workshop doen? Zorg dat je voldoende opgeladen batterijen hebt voor de ERP s (6 per ERP). Zorg dat de zes engino dozen aanwezig zijn in het lokaal.
Colofon. Joost van den Brink - 2 -
 Colofon Auteur: Eindredactie: Jaap Jan de Jong Thijs A. Afman Joost van den Brink Dit is een uitgave van Brink Technical Solutions BV 2011. Deze uitgave mag vrij worden gekopieerd binnen educatieve instellingen.
Colofon Auteur: Eindredactie: Jaap Jan de Jong Thijs A. Afman Joost van den Brink Dit is een uitgave van Brink Technical Solutions BV 2011. Deze uitgave mag vrij worden gekopieerd binnen educatieve instellingen.
Werkbladen voor Arduino workshop 1
 De aansluitingen van de Arduino Uno Werkbladen voor Arduino workshop 1 Arduino Arduino is een open-source ontwikkelbord, waarmee het eenvoudig is om informatica aan fysieke objecten te koppelen. Je kunt
De aansluitingen van de Arduino Uno Werkbladen voor Arduino workshop 1 Arduino Arduino is een open-source ontwikkelbord, waarmee het eenvoudig is om informatica aan fysieke objecten te koppelen. Je kunt
HANDLEIDING WINDOWS INTUNE
 HANDLEIDING WINDOWS INTUNE In deze handleiding beschrijven we de stappen die nodig zijn om Windows-apparaten op te nemen in de Windows Intune-omgeving van de school en deze lokaal te beheren. INHOUD 1.
HANDLEIDING WINDOWS INTUNE In deze handleiding beschrijven we de stappen die nodig zijn om Windows-apparaten op te nemen in de Windows Intune-omgeving van de school en deze lokaal te beheren. INHOUD 1.
Deel 1: Arduino kennismaking. Wat is een microcontroller, structuur van een programma, syntax,
 Deel 1: Arduino kennismaking Wat is een microcontroller, structuur van een programma, syntax, Wat is een microcontroller Wat is een microcontroller? Microcontroller = kleine dedicated computer. - Beperkt
Deel 1: Arduino kennismaking Wat is een microcontroller, structuur van een programma, syntax, Wat is een microcontroller Wat is een microcontroller? Microcontroller = kleine dedicated computer. - Beperkt
Inhoudsopgave Voorwoord 5 Voordat je begint 6 Wat heb je nodig? 7 De website bij het boek 7 Voor ouders, verzorgers en leraren
 Inhoudsopgave Voorwoord... 5 Voordat je begint... 6 Wat heb je nodig?... 7 De website bij het boek... 7 Voor ouders, verzorgers en leraren... 8 Vervolgboeken over programmeren... 8 1. Aan de slag met Python
Inhoudsopgave Voorwoord... 5 Voordat je begint... 6 Wat heb je nodig?... 7 De website bij het boek... 7 Voor ouders, verzorgers en leraren... 8 Vervolgboeken over programmeren... 8 1. Aan de slag met Python
Handleiding voor installatie en gebruik van
 Handleiding voor installatie en gebruik van Opticon OPN-2001 Data Collector Inhoud pakket: - OPN-2001 - USB Communicatie kabel - Neckstrap Voordat u kunt communiceren met de OPN-2001 dient u de volgende
Handleiding voor installatie en gebruik van Opticon OPN-2001 Data Collector Inhoud pakket: - OPN-2001 - USB Communicatie kabel - Neckstrap Voordat u kunt communiceren met de OPN-2001 dient u de volgende
Meet the Arduino FAMILY
 www.arduino.cc Arduino is HARDWARE Meet the Arduino FAMILY Mega Lilypad Ethernet Mini En meer... Gemeenschappelijke kenmerken Printkaartje met een ATMEL microcontroller Digitale en analoge in- en/of uitgangen
www.arduino.cc Arduino is HARDWARE Meet the Arduino FAMILY Mega Lilypad Ethernet Mini En meer... Gemeenschappelijke kenmerken Printkaartje met een ATMEL microcontroller Digitale en analoge in- en/of uitgangen
g. Je kan nu door op de play knop te drukken je programma versturen naar de EV3 brick waarna het zal uitgevoerd worden.
 EV3 brick verbinden via bluetooth. 1) Alvorens de LEGO software op te starten kijk je het best of bluetooth op je PC is geactiveerd. Vooral bij laptops schakelt men deze functie vaak uit om batterij te
EV3 brick verbinden via bluetooth. 1) Alvorens de LEGO software op te starten kijk je het best of bluetooth op je PC is geactiveerd. Vooral bij laptops schakelt men deze functie vaak uit om batterij te
Opmerking: afhankelijk van uw configuratie is de print voorzien van de benodigde componenten.
 Gefeliciteerd met de aankoop van deze PC- I/ O kaart. Lees vóór u de kaart gaat installeren, de instructies in deze gebruiksaanwijzing zorgvuldig. Bewaar de gebruiksaanwijzing voor latere naslag. Controleer
Gefeliciteerd met de aankoop van deze PC- I/ O kaart. Lees vóór u de kaart gaat installeren, de instructies in deze gebruiksaanwijzing zorgvuldig. Bewaar de gebruiksaanwijzing voor latere naslag. Controleer
Di-Control HANDLEIDING Di-Control versie: 2.6
 Di-Control HANDLEIDING Di-Control versie: 2.6 2 INLEIDING Di-Control kan gebruikt worden met diverse apparatuur om een muisaanwijzer (mode: Mouse-control) te besturen of toets-commando s (mode: Key-control)
Di-Control HANDLEIDING Di-Control versie: 2.6 2 INLEIDING Di-Control kan gebruikt worden met diverse apparatuur om een muisaanwijzer (mode: Mouse-control) te besturen of toets-commando s (mode: Key-control)
PROJECT 2 - MAZE DRIVE - OFFERTE RICK VAN VONDEREN
 PROJECT 2 - MAZE DRIVE - OFFERTE RICK VAN VONDEREN 13 DECEMBER 2017 Inhoudsopgave 1 Inleiding 2 2 Functioneel Ontwerp 3 2.1 Doel 3 2.2 Functionele eisen 3 2.3 Scenario s 3 3 Technisch Ontwerp 4 3.1 Niet-functionele
PROJECT 2 - MAZE DRIVE - OFFERTE RICK VAN VONDEREN 13 DECEMBER 2017 Inhoudsopgave 1 Inleiding 2 2 Functioneel Ontwerp 3 2.1 Doel 3 2.2 Functionele eisen 3 2.3 Scenario s 3 3 Technisch Ontwerp 4 3.1 Niet-functionele
Installatie-instructies
 Installatie-instructies Inhoud Software installeren 2 Hoe installeer ik Coach Junior voor het VMBO? Software instellen 4 Wat moet ik instellen zodat de software goed werkt? Hardware aansluiten 6 Mogelijke
Installatie-instructies Inhoud Software installeren 2 Hoe installeer ik Coach Junior voor het VMBO? Software instellen 4 Wat moet ik instellen zodat de software goed werkt? Hardware aansluiten 6 Mogelijke
Landelijk Indicatie Protocol (LIP)
") Handleiding Landelijk Indicatie Protocol programma pagina 1 of 18 Landelijk Indicatie Protocol (LIP) Welkom bij LIP Lip is ontstaan uit een toegevoegde module aan het kraamzorg administratie pakket van
Handleiding Landelijk Indicatie Protocol programma pagina 1 of 18 Landelijk Indicatie Protocol (LIP) Welkom bij LIP Lip is ontstaan uit een toegevoegde module aan het kraamzorg administratie pakket van
Over Betuwe College. Lego Mindstorm project
 Inhoudsopgave 1 Het aansluiten van onderdelen.... 3 2 De lego software.... 4 2.1 Het programeerscherm.... 5 2.2 Programma naar NXT... 6 3 Introductie tot programmeren.... 7 3.1 De druksensor.... 7 3.2
Inhoudsopgave 1 Het aansluiten van onderdelen.... 3 2 De lego software.... 4 2.1 Het programeerscherm.... 5 2.2 Programma naar NXT... 6 3 Introductie tot programmeren.... 7 3.1 De druksensor.... 7 3.2
A p p l i e d M i c r o E l e c t r o n i c s A M E B. V. O p e n d o o r d a y
 Dit is Eddy - een interactieve robot die iedereen kan maken! Eddy kan lopen, dansen, lichtjes maken en is bestuurbaar met je telefoon! Eddy is volledig open source en Arduino compatible zodat je zelf ook
Dit is Eddy - een interactieve robot die iedereen kan maken! Eddy kan lopen, dansen, lichtjes maken en is bestuurbaar met je telefoon! Eddy is volledig open source en Arduino compatible zodat je zelf ook
Locobuffer Handleiding
 Locobuffer Handleiding HDM09 Disclaimer van Aansprakelijkheid: Het gebruik van alle items die kunnen worden gekocht en alle installatie-instructies die kunnen worden gevonden op deze site is op eigen risico.
Locobuffer Handleiding HDM09 Disclaimer van Aansprakelijkheid: Het gebruik van alle items die kunnen worden gekocht en alle installatie-instructies die kunnen worden gevonden op deze site is op eigen risico.
Arduino. Arduino UNO. Sam Decoster. CoderDojo Roeselare. Sam Decoster
 Arduino Arduino UNO Sam Decoster CoderDojo Roeselare Sam Decoster Inleiding Arduino is een open-source ontwikkelbord, waarmee het mogelijk wordt om informatica te koppelen aan fysieke objecten. Het is
Arduino Arduino UNO Sam Decoster CoderDojo Roeselare Sam Decoster Inleiding Arduino is een open-source ontwikkelbord, waarmee het mogelijk wordt om informatica te koppelen aan fysieke objecten. Het is
TECHNOLOGIE TECHNIEK. Vervangende opdracht voor produceer de sleutelhanger. H.O. Boorsma.
 TECHNOLOGIE TECHNIEK Vervangende opdracht voor produceer de sleutelhanger. H.O. Boorsma. A r d u I n o N a n o Woord vooraf.. In het vierde leerjaar GL/GT Technologie werken de leerlingen die techniek
TECHNOLOGIE TECHNIEK Vervangende opdracht voor produceer de sleutelhanger. H.O. Boorsma. A r d u I n o N a n o Woord vooraf.. In het vierde leerjaar GL/GT Technologie werken de leerlingen die techniek
HANDLEIDING SMARTSIREN SLIM ALARMSYSTEEM
 HANDLEIDING SMARTSIREN SLIM ALARMSYSTEEM Inhoud Inleiding... 3 1. Smartsiren app... 4 2. Installatie... 6 3. Montage... 7 4. Gebruik... 8 5. Deur-/ raamsensor... 9 6. Afstandsbediening... 10 7. Bewegingssensor...
HANDLEIDING SMARTSIREN SLIM ALARMSYSTEEM Inhoud Inleiding... 3 1. Smartsiren app... 4 2. Installatie... 6 3. Montage... 7 4. Gebruik... 8 5. Deur-/ raamsensor... 9 6. Afstandsbediening... 10 7. Bewegingssensor...
Introductiekaart Niveau B Installatie software
 echniek Introductiekaart Niveau B Installatie software 0 Installatie programmeer software - eenmalig Stap. Kijk op de computer of de Mindstorms software geïnstalleerd is. Als hij al geïnstalleerd is kan
echniek Introductiekaart Niveau B Installatie software 0 Installatie programmeer software - eenmalig Stap. Kijk op de computer of de Mindstorms software geïnstalleerd is. Als hij al geïnstalleerd is kan
Logo quiz Project Inleiding op de Logo!
 Logo quiz Project Inleiding op de Logo! Project ontwikkelt door: Tim van Schuylenburg Ben van Kruisbergen Inhoudsopgave Projectbeschrijving en Planning 2 Blz. De benodigdheden en aansluitschema 4-8 Complete
Logo quiz Project Inleiding op de Logo! Project ontwikkelt door: Tim van Schuylenburg Ben van Kruisbergen Inhoudsopgave Projectbeschrijving en Planning 2 Blz. De benodigdheden en aansluitschema 4-8 Complete
PROJECT 5: PLANT MONITOR
 PROJECT 5: PLANT MONITOR IN DIT PROJECT ZAL IK EEN NIEUW TYPE ANALOGE SENSOR INTRODUCEREN DIE DE VOCHTIGHEIDSGRAAD MEET. JE GAAT EEN ALARMSYSTEEM MET LICHT EN GELUID BOUWEN DAT JE VERTELT WANNEER JE PLANT
PROJECT 5: PLANT MONITOR IN DIT PROJECT ZAL IK EEN NIEUW TYPE ANALOGE SENSOR INTRODUCEREN DIE DE VOCHTIGHEIDSGRAAD MEET. JE GAAT EEN ALARMSYSTEEM MET LICHT EN GELUID BOUWEN DAT JE VERTELT WANNEER JE PLANT
Besturing van de Miniatuurwereld RM-U. Gebruik van de Bootloader
 Besturing van de Miniatuurwereld RM-U Gebruik van de Bootloader Auteur: Leon J.A. van Perlo Versie: 1.0 Datum: 24 december 2012 Release beheer Deze handleiding is van toepassing op Print o RM-U Rev 00
Besturing van de Miniatuurwereld RM-U Gebruik van de Bootloader Auteur: Leon J.A. van Perlo Versie: 1.0 Datum: 24 december 2012 Release beheer Deze handleiding is van toepassing op Print o RM-U Rev 00
Palmtop - Aqua-Max Servicehandleiding
 Palmtop - Aqua-Max Servicehandleiding Inleiding Deze handleiding geeft een beschrijving van de Aqua-Max Palmtop en de Terminal software die nodig is om software op de Aqua-Max en de Palmtop te installeren.
Palmtop - Aqua-Max Servicehandleiding Inleiding Deze handleiding geeft een beschrijving van de Aqua-Max Palmtop en de Terminal software die nodig is om software op de Aqua-Max en de Palmtop te installeren.
Hand-out Introductieworkshop LED programmeren
 Hand-out Introductieworkshop LED programmeren Inleiding Deze hand-out is bedoeld als naslag voor de introductie workshop LED programmeren. In deze handout vind je de uitleg over LEDs, Arduino s en LED
Hand-out Introductieworkshop LED programmeren Inleiding Deze hand-out is bedoeld als naslag voor de introductie workshop LED programmeren. In deze handout vind je de uitleg over LEDs, Arduino s en LED
RTC Opleidingen Beckhoff TwinCAT. Voorbereiding
 Voorbereiding Beckhoff Automation bvba Belgium Rudi Grouset v3.3-10/11/2014 Voorbereiding voor het volgen van de Beckhoff training Om de opleidingsdagen bij Beckhoff succesvol te laten doorgaan vragen
Voorbereiding Beckhoff Automation bvba Belgium Rudi Grouset v3.3-10/11/2014 Voorbereiding voor het volgen van de Beckhoff training Om de opleidingsdagen bij Beckhoff succesvol te laten doorgaan vragen
gebruikershandleiding tablet / smartphone
 Roboc@r gebruikershandleiding tablet / smartphone ROBOTICS BT Smart Beginner Set Elektronische onderdelen Deze zien eruit als normale onderdelen en kunnen ook samen met gewone onderdelen gemonteerd worden.
Roboc@r gebruikershandleiding tablet / smartphone ROBOTICS BT Smart Beginner Set Elektronische onderdelen Deze zien eruit als normale onderdelen en kunnen ook samen met gewone onderdelen gemonteerd worden.
De mbot Ranger. Je wilt zeker meteen al aan de slag. Maar voordat we beginnen moet je 3 dingen weten.
 De mbot Ranger De mbot Ranger is een robot die je helemaal zelf kunt programmeren. De mbot Ranger heeft veel meer functionaliteiten dan de originele mbot. Hij kan naast alle functies van de mbot ook de
De mbot Ranger De mbot Ranger is een robot die je helemaal zelf kunt programmeren. De mbot Ranger heeft veel meer functionaliteiten dan de originele mbot. Hij kan naast alle functies van de mbot ook de
Installeren Arduino software (1.05)
") DVMEGA onder windows/linux er zijn aantal belangrijke stappen Installeren Ardruino software Aanpassen Seriële buffers Programmeren van de Arduino Instellen van de G4KLX Jonatahan software Installeren Arduino
DVMEGA onder windows/linux er zijn aantal belangrijke stappen Installeren Ardruino software Aanpassen Seriële buffers Programmeren van de Arduino Instellen van de G4KLX Jonatahan software Installeren Arduino
SPRAAK MODULE INT-VG. 1. Eigenschappen. 2. Specificaties
 SPRAAK MODULE INT-VG int-vg_nl 12/11 De INT-VG module werkt samen met de INTEGRA en VERSA alarmsystemen en maakt implementatie van spraakberichten mogelijk (deze module vervangt de CA-64 SM spraak synthesizer
SPRAAK MODULE INT-VG int-vg_nl 12/11 De INT-VG module werkt samen met de INTEGRA en VERSA alarmsystemen en maakt implementatie van spraakberichten mogelijk (deze module vervangt de CA-64 SM spraak synthesizer
DE ASTRO PI PROGRAMMEREN VOOR MISSION ZERO
 DE ASTRO PI PROGRAMMEREN DOCENTENHANDLEIDING 1 Deze handleiding is bedoeld om leerlingen te ondersteunen bij de Astro Pi Challenge, waarbij leerlingen een programma voor de Astro Pi-computer in het ISS
DE ASTRO PI PROGRAMMEREN DOCENTENHANDLEIDING 1 Deze handleiding is bedoeld om leerlingen te ondersteunen bij de Astro Pi Challenge, waarbij leerlingen een programma voor de Astro Pi-computer in het ISS
PM32. Besturing van de Miniatuurwereld. Gebruik van de Bootloader. PM32 Bootloader VPEB Besturing Miniatuurwereld
 (deze pagina is opzettelijk leeg) Besturing van de Miniatuurwereld PM32 Gebruik van de Bootloader Auteur: Leon J.A. van Perlo Versie: 1.0 Datum: 18 december 2016 Pag 12 van 12 versie 1.0-18 december 2016
(deze pagina is opzettelijk leeg) Besturing van de Miniatuurwereld PM32 Gebruik van de Bootloader Auteur: Leon J.A. van Perlo Versie: 1.0 Datum: 18 december 2016 Pag 12 van 12 versie 1.0-18 december 2016
Besturing van de Miniatuurwereld PM32. Gebruik van de Bootloader
 Besturing van de Miniatuurwereld PM32 Gebruik van de Bootloader Auteur: Leon J.A. van Perlo Versie: 1.0 Datum: 18 december 2016 Release beheer Deze handleiding is van toepassing op Print o PM32 Rev 00
Besturing van de Miniatuurwereld PM32 Gebruik van de Bootloader Auteur: Leon J.A. van Perlo Versie: 1.0 Datum: 18 december 2016 Release beheer Deze handleiding is van toepassing op Print o PM32 Rev 00
RCL Arduino Workshop 1
 RCL Arduino Workshop 1 Leren door doen april 2015 - slides voor RCL Arduino workshop 1 ON4CDU & ON8VQ Workshop Leren door doen Werken in een groep Beperkte tijd Alleen essentiele vragen stellen Thuis oefenen
RCL Arduino Workshop 1 Leren door doen april 2015 - slides voor RCL Arduino workshop 1 ON4CDU & ON8VQ Workshop Leren door doen Werken in een groep Beperkte tijd Alleen essentiele vragen stellen Thuis oefenen
Handleiding Alma Rally & Alma Rally Off-road
 Handleiding Alma Rally & Alma Rally Off-road Versie 1.2.1 Korsmit Rally Elektronics 16-7-2017 Inhoud Inhoud... 2 Samenvatting... 3 1. informatie... 4 Achtergrond... 4 Weergaven:... 4 2. Werking... 5 3.1:
Handleiding Alma Rally & Alma Rally Off-road Versie 1.2.1 Korsmit Rally Elektronics 16-7-2017 Inhoud Inhoud... 2 Samenvatting... 3 1. informatie... 4 Achtergrond... 4 Weergaven:... 4 2. Werking... 5 3.1:
INHOUD. dankbetuiging inleiding DE ARDUINO REVOLUTIE...16 OVER DIT BOEK...17 OPZET VAN DIT BOEK...18
 INHOUD dankbetuiging... 13 inleiding... 15 DE ARDUINO REVOLUTIE...16 OVER DIT BOEK...17 OPZET VAN DIT BOEK...18 PROJECT 0: AAN DE SLAG...22 HARDWARE... 23 DE ARDUINO UNO... 23 STROOM... 23 BREADBOARDS...
INHOUD dankbetuiging... 13 inleiding... 15 DE ARDUINO REVOLUTIE...16 OVER DIT BOEK...17 OPZET VAN DIT BOEK...18 PROJECT 0: AAN DE SLAG...22 HARDWARE... 23 DE ARDUINO UNO... 23 STROOM... 23 BREADBOARDS...
Constructie van het klokcircuit voor de processor en het spanningsdetectie circuit
 Constructie van het klokcircuit voor de processor en het spanningsdetectie circuit Monteer en soldeer C1 {399-4329-ND, 0,1 µf, opdruk 104}. Deze condensator bevindt zich bij pin 20 van de CPU-voet (R1
Constructie van het klokcircuit voor de processor en het spanningsdetectie circuit Monteer en soldeer C1 {399-4329-ND, 0,1 µf, opdruk 104}. Deze condensator bevindt zich bij pin 20 van de CPU-voet (R1
Sensoren bereik. Display status
 Algemeen installatiediagram LED Digitale display Display Hoofdunit Bij het achteruit rijden zal het display weergeven: 1.5m Veilig Groen 1.3-1.4m Veilig Groen 1.0-1.2m Veilig Groen 0.7-0.9m Alarm Geel
Algemeen installatiediagram LED Digitale display Display Hoofdunit Bij het achteruit rijden zal het display weergeven: 1.5m Veilig Groen 1.3-1.4m Veilig Groen 1.0-1.2m Veilig Groen 0.7-0.9m Alarm Geel
De mbot. Je wilt zeker meteen al aan de slag. Maar voordat we beginnen moet je 3 dingen weten.
 De mbot De mbot is een robot die je helemaal zelf kunt programmeren. Hij kan rijden, geluid maken, heeft verschillende kleuren lampjes, kan lijnen op de grond volgen en heeft zelfs een ultrasonische module!
De mbot De mbot is een robot die je helemaal zelf kunt programmeren. Hij kan rijden, geluid maken, heeft verschillende kleuren lampjes, kan lijnen op de grond volgen en heeft zelfs een ultrasonische module!
ROBO- BITS-59. Jaargang15, nummer 4, december 2012
 ROBO- Afz.hcc Robotica gg, p.a. Henk de Gans,Koelmanhof 2 3861GG Nijkerk.. BITS-59 Jaargang15, nummer 4, december 2012 1 December 2012 Robobits is een uitgave van de hcc!robotica gebruikers groep, en wordt
ROBO- Afz.hcc Robotica gg, p.a. Henk de Gans,Koelmanhof 2 3861GG Nijkerk.. BITS-59 Jaargang15, nummer 4, december 2012 1 December 2012 Robobits is een uitgave van de hcc!robotica gebruikers groep, en wordt
Omschrijving bij bestellijst project Robot Brainbox Robot
 2019 - Omschrijving bij bestellijst project Robot Brainbox Robot NEW 2019: Webpagina met lesvideo s, lesmateriaal, leerlijnen en uitdagingen met duidelijke STEM links U ontvangt een pakket met: www.stemzone.be
2019 - Omschrijving bij bestellijst project Robot Brainbox Robot NEW 2019: Webpagina met lesvideo s, lesmateriaal, leerlijnen en uitdagingen met duidelijke STEM links U ontvangt een pakket met: www.stemzone.be
SMP50-200/201 INGENIA HORIZON 5 SMARTPHONE PARTITIE FIX INSTRUCTIES
 SMP50-200/201 INGENIA HORIZON 5 SMARTPHONE PARTITIE FIX INSTRUCTIES Page 1 of 8 VOORDAT U BEGINT: BACKUP BELANGRIJKE GEGEVENS! Bij het upgraden van uw Yarvik Smartphone kunnen alle gebruikersinstellingen,
SMP50-200/201 INGENIA HORIZON 5 SMARTPHONE PARTITIE FIX INSTRUCTIES Page 1 of 8 VOORDAT U BEGINT: BACKUP BELANGRIJKE GEGEVENS! Bij het upgraden van uw Yarvik Smartphone kunnen alle gebruikersinstellingen,
Montagevoorschriften
 Montagevoorschriften BCU Mont_BCU1_NL.Doc 1/9 Inhoudsopgave 1. Montage van de onderdelen... 3 2. Aansluitingen van de 8 polige stekker... 3 3. Aansluitingen van de 10 polige stekker... 4 4. Opstarten...
Montagevoorschriften BCU Mont_BCU1_NL.Doc 1/9 Inhoudsopgave 1. Montage van de onderdelen... 3 2. Aansluitingen van de 8 polige stekker... 3 3. Aansluitingen van de 10 polige stekker... 4 4. Opstarten...
Workshop FLL. Leer robots programmeren. Marieke Peelen Lennart de Graaf Daryo Verouden -
 Workshop FLL Leer robots programmeren Marieke Peelen Lennart de Graaf Daryo Verouden - 1 Student-coaches 2 FIRST LEGO League 3 FLL Core values We zijn een team We doen zelf het werk met hulp van onze coaches.
Workshop FLL Leer robots programmeren Marieke Peelen Lennart de Graaf Daryo Verouden - 1 Student-coaches 2 FIRST LEGO League 3 FLL Core values We zijn een team We doen zelf het werk met hulp van onze coaches.
Single Board computers. Ruud van der Meer (voor HCC d.d. 4 dec2017 Leiderdorp)
") Microcontroller projecten Single Board computers Ruud van der Meer (voor HCC d.d. 4 dec2017 Leiderdorp) Micro Controllers Wat ging er aan vooraf: De 8051 Basic controller De Basic-Stamp. De C-Control van
Microcontroller projecten Single Board computers Ruud van der Meer (voor HCC d.d. 4 dec2017 Leiderdorp) Micro Controllers Wat ging er aan vooraf: De 8051 Basic controller De Basic-Stamp. De C-Control van
DIGITALE MODE MET POWER SDR
 DIGITALE MODE MET POWER SDR Als u een SDR tranceiver of ontvanger in gebruik heeft, is het misschien ook leuk om de digitale modi zoals BPSK31, RTTY enz. enz. te kunnen ontvangen en zenden. We beperken
DIGITALE MODE MET POWER SDR Als u een SDR tranceiver of ontvanger in gebruik heeft, is het misschien ook leuk om de digitale modi zoals BPSK31, RTTY enz. enz. te kunnen ontvangen en zenden. We beperken
Deel 8: stappenmotoren en interrupts
 Deel 8: stappenmotoren en interrupts Stappenmotor Kan hoek van as instellen zonder een gesloten feedbacksysteem. Het is een simpel en precies open loop systeem. Werkt met discrete stappen, dus schokkerig
Deel 8: stappenmotoren en interrupts Stappenmotor Kan hoek van as instellen zonder een gesloten feedbacksysteem. Het is een simpel en precies open loop systeem. Werkt met discrete stappen, dus schokkerig
Mini Handleiding over Elektronica-onderdelen
 Mini Handleiding over Elektronica-onderdelen Deze handleiding is speciaal geschreven voor kinderen vanaf 10 jaar. Op een eenvoudige manier en in begrijpelijke tekst leer je stapsgewijs wat elk elektronica-onderdeel
Mini Handleiding over Elektronica-onderdelen Deze handleiding is speciaal geschreven voor kinderen vanaf 10 jaar. Op een eenvoudige manier en in begrijpelijke tekst leer je stapsgewijs wat elk elektronica-onderdeel
by Jody Culkin Bronnen die gratis gebruikt, verspreid of aangepast kunnen worden. meestal software of hardware.
 Wat is een Arduino??? Vertaling naar NL: Johan Korten by Jody Culkin Arduino is een open source elektronica prototype platform. Wat houdt dat in? Open Source Bronnen die gratis gebruikt, verspreid of aangepast
Wat is een Arduino??? Vertaling naar NL: Johan Korten by Jody Culkin Arduino is een open source elektronica prototype platform. Wat houdt dat in? Open Source Bronnen die gratis gebruikt, verspreid of aangepast
De RCX voor beginners De intelligente steen van LEGO. I. De RCX zonder computer
 De RCX voor beginners De intelligente steen van LEGO I. De RCX zonder computer September 2001 Stichting CMA / AMSTEL Instituut Universiteit van Amsterdam Kruislaan 404 1098 SM Amsterdam Teksten: Marion
De RCX voor beginners De intelligente steen van LEGO I. De RCX zonder computer September 2001 Stichting CMA / AMSTEL Instituut Universiteit van Amsterdam Kruislaan 404 1098 SM Amsterdam Teksten: Marion
Minimale eisen voor de computer
 Countdown Timer Deze software is gemaakt om te gebruiken voor handelingen waar een aflopende tijdklok handig is. Dit is een uitgebreide versie. Het stelt je in staat eigen schema`s aan te maken die je
Countdown Timer Deze software is gemaakt om te gebruiken voor handelingen waar een aflopende tijdklok handig is. Dit is een uitgebreide versie. Het stelt je in staat eigen schema`s aan te maken die je
Mobiel Internet Aansluiten
 Mobiel Internet Aansluiten Mobiel Internet aansluiten is niet veel meer dan het plaatsen van een simkaart in het apparaat waar u Mobiel Internet voor wilt gebruiken. Uw eigen apparaat of de Internet Stick
Mobiel Internet Aansluiten Mobiel Internet aansluiten is niet veel meer dan het plaatsen van een simkaart in het apparaat waar u Mobiel Internet voor wilt gebruiken. Uw eigen apparaat of de Internet Stick
Installatie & Snelstart Gids iais Wireless(draadloos) AIS Ontvanger en NMEA Server
 AIS Ontvanger en NMEA Server") Installatie & Snelstart Gids iais Wireless(draadloos) AIS Ontvanger en NMEA Server SNELSTART GIDS iais VR1.01 1. Introductie Hartelijk dank voor het aanschaffen van de iais Ontvanger. Het is aan te bevelen
Installatie & Snelstart Gids iais Wireless(draadloos) AIS Ontvanger en NMEA Server SNELSTART GIDS iais VR1.01 1. Introductie Hartelijk dank voor het aanschaffen van de iais Ontvanger. Het is aan te bevelen
Wind, Sun & Rain Sensor Instructions
 Awning Instructions Wind, Sun & Rain Sensor Instructions B C D Nederlands Wind, Zon & Regen Sensor Instructies Inhoud Garantie Voordat u de sensor aansluit raden wij u aan de instructies zorgvuldig door
Awning Instructions Wind, Sun & Rain Sensor Instructions B C D Nederlands Wind, Zon & Regen Sensor Instructies Inhoud Garantie Voordat u de sensor aansluit raden wij u aan de instructies zorgvuldig door
Het aansluiten van uw Victron op een computer; met VE Bus Quick Configure
 Het aansluiten van uw Victron op een computer; met VE Bus Quick Configure Voor het aansluiten van uw Victron op een computer is het volgende belangrijk: - Alleen identieke modellen met VE Bus software
Het aansluiten van uw Victron op een computer; met VE Bus Quick Configure Voor het aansluiten van uw Victron op een computer is het volgende belangrijk: - Alleen identieke modellen met VE Bus software
Powerpack. gebruikshandleiding
 Powerpack gebruikshandleiding 1 INHOUDSOPGAVE 1. Inleiding De RMA powerpack is een hulpmiddel voor de begeleiding. Het vergemakkelijkt het duwen van een rolstoel gebruiker. De hulpmotor is niet ontworpen
Powerpack gebruikshandleiding 1 INHOUDSOPGAVE 1. Inleiding De RMA powerpack is een hulpmiddel voor de begeleiding. Het vergemakkelijkt het duwen van een rolstoel gebruiker. De hulpmotor is niet ontworpen
GETEST EN WERKEND BEVONDEN VOOR ALLE NIEUWE EURO BILJETTEN!
 Wanneer een nieuw bankbiljet wordt uitgegeven, is het noodzakelijk dat u een update van de AT100 uitvoert. Gelieve de volgende instructies stap voor stap te volgen. GETEST EN WERKEND BEVONDEN VOOR ALLE
Wanneer een nieuw bankbiljet wordt uitgegeven, is het noodzakelijk dat u een update van de AT100 uitvoert. Gelieve de volgende instructies stap voor stap te volgen. GETEST EN WERKEND BEVONDEN VOOR ALLE
Introductiekaart Niveau B Installatie software
 echniek Introductiekaart Niveau B Installatie software 0 Installatie programmeer software - eenmalig Stap. Kijk op de computer of de Mindstorms software geïnstalleerd is. Als hij al geïnstalleerd is kan
echniek Introductiekaart Niveau B Installatie software 0 Installatie programmeer software - eenmalig Stap. Kijk op de computer of de Mindstorms software geïnstalleerd is. Als hij al geïnstalleerd is kan
TAB13-201 XENTA 13c 13,3 TABLET FIRMWARE UPGRADE INSTRUCTIES
 TAB13-201 XENTA 13c 13,3 TABLET FIRMWARE UPGRADE INSTRUCTIES Page 1 of 9 VOORDAT U BEGINT: BACKUP BELANGRIJKE GEGEVENS! Bij het upgraden van uw Yarvik tablet naar Android 4.1.1 zullen alle gebruikersinstellingen,
TAB13-201 XENTA 13c 13,3 TABLET FIRMWARE UPGRADE INSTRUCTIES Page 1 of 9 VOORDAT U BEGINT: BACKUP BELANGRIJKE GEGEVENS! Bij het upgraden van uw Yarvik tablet naar Android 4.1.1 zullen alle gebruikersinstellingen,
PowerView Motorisation
 PowerView Motorisation Smart shades that simplify your life Scène Snelstart gids Een briljante evolutie in The Art of Window Styling. Deze gids helpt je op weg met je PowerView aankoop. STAP 1 INSTALLEER
PowerView Motorisation Smart shades that simplify your life Scène Snelstart gids Een briljante evolutie in The Art of Window Styling. Deze gids helpt je op weg met je PowerView aankoop. STAP 1 INSTALLEER
Welkom in de wereld van de fischertechnik ROBOTICS-lijn 3 Een beetje algemene informatie 3. Uitleg van de onderdelen 4
 Welkom in de wereld van de fischertechnik ROBOTICS-lijn 3 Een beetje algemene informatie 3 Elektriciteit 3 Robots, kunstmatige mensen? 4 ROBOTICA, (bijna) alles automatisch 4 Uitleg van de onderdelen 4
Welkom in de wereld van de fischertechnik ROBOTICS-lijn 3 Een beetje algemene informatie 3 Elektriciteit 3 Robots, kunstmatige mensen? 4 ROBOTICA, (bijna) alles automatisch 4 Uitleg van de onderdelen 4
Elektronica bouwen met M.T.S. LEGEO modulen
 1 Elektronica bouwen met M.T.S. LEGEO modulen Door PE1KTH Deel 1. Datum 15-10-2015 Elektronica componenten worden steeds kleiner van afmeting en in SMD gemaakt. Het is dan lastiger om een complete ontvanger,tranceiver
1 Elektronica bouwen met M.T.S. LEGEO modulen Door PE1KTH Deel 1. Datum 15-10-2015 Elektronica componenten worden steeds kleiner van afmeting en in SMD gemaakt. Het is dan lastiger om een complete ontvanger,tranceiver
Bouwbeschrijving UniSAI
 Bouwbeschrijving UniSAI Print maken De layout heeft hele fijne sporen en daarom is fotografisch afdrukken de enige mogelijkheid. Voor het bewerken van de layout gebruik ik het programma Adobe Photoshop
Bouwbeschrijving UniSAI Print maken De layout heeft hele fijne sporen en daarom is fotografisch afdrukken de enige mogelijkheid. Voor het bewerken van de layout gebruik ik het programma Adobe Photoshop
Prototype Darth Vader half maart 2017 definitieve mechanische ontwerpen
 Omschrijving bij bestellijst project Robot Brainbox Robot Prototype Darth Vader half maart 2017 definitieve mechanische ontwerpen De elektronica is volledig getest en klaar om in productie te gaan. We
Omschrijving bij bestellijst project Robot Brainbox Robot Prototype Darth Vader half maart 2017 definitieve mechanische ontwerpen De elektronica is volledig getest en klaar om in productie te gaan. We