Rudi Penne. Karel de Grote-Hogeschool, Antwerp
|
|
|
- Bruno Sanders
- 5 jaren geleden
- Aantal bezoeken:
Transcriptie
1 Nationale Wiskundedagen 7: Projectieve Meetkunde en Mechanica Rudi Penne Karel de Grote-Hogeschool, Antwerp p.1/34
2 Het projectief vlak = euclidisch vlak vanuit perspectief waarnemer : oorsprong standaardpositie werkvlak : euclidisch punt (:3:1) (1::1) x y+z= (3:1:1) kijkrichting 4 3 k(,1,) 1 Y k(3,1,1) 1 X 3 4 projectief punt punt op (verdwijnrichting): p./34
3 p.3/34 Lijncoördinaten Rechte in het projectief vlak: ) (vlak van kijkrichtingen naar lijncoördinaten: van is punt op! ) (bevat alle punten op!
4 Optelling van homogene coördinaten Som van punten: ligt op de rechte door Som van rechten: en! gaat door snijpunt van en Opgelet: De juiste positie van de som hangt af van de gekozen homogene coördinaten. p.4/34
5 p.5/34 Uitwendig product en : punten in : rechte door en homogene coördinaten:,
6 p.6/34 Eigenschappen van anti-symmetrisch: bilineair: IR : anti-symmetrische tensor in IR in formeel: basis:
7 p.7/34 Duaal uitwendig product en ; : snijpunt van : rechten in B 8 6 B C A D C 4 Voorbeeld: (A D) (B C)
8 p.8/34 Kinematica in het vlak rotaties rotatiecentrum: (radiale) hoeksnelheid: projectief bewegingscentrum: 5 v 4 P P α C P C : beweging van ,, Voorbeeld: centrum ) (
9 p.9/34 Kinematica in het vlak translaties translatievector: projectief bewegingscentrum: v P.4 C. C P P..4 : beweging van , Voorbeeld: translatie: ) (
10 Samenstelling van bewegingen in punt : resulterend centrum: Gevolg: De samenstelling van rotaties en/of translaties is weer een rotatie of translatie. p.1/34
11 Directe kinematica centrum voor resulterende beweging: Voorbeeld: bewegingscentrum grijper: 1 8 C locatie: op rechte 6 4 C α C 1 α p.11/34
12 Inverse kinematica Gewenste beweging voor grijper :? zodat C C 3 α α 3 α 1 C opgelet: vereist aantal scharnieren ( in 3D) C 4 α α 1 C C 1 α 4 6 p.1/34
13 Singulariteiten speciale positie van scharnieren beperkte mobiliteit Voorbeeld: vlakke arm met 3 v.g.: singulariteit scharnieren collineair 1 8 C 6 C 3 4 C 1 C p.13/34
14 Relatieve centra : starre lichamen in het vlak : bewegingscentrum voor relatief centrum: Opmerkingen geen relatieve beweging beweging rond scharnier p.14/34
15 Aronhold-Kennedy : 3 starre lichamen : 3 relatieve centra collineair 1 8 C B 1 C 1 C 3 B B p.15/34
16 Staafconstructies staven met scharnieren ( ) en starre beweging van : staaf Voorwaarde: centrum! 1 C 14 primaire centra: scharnieren C 1 secundaire centra: Aronhold-Kennedy 4 C 34 C 13 3 C 3 C p.16/34
17 De regel van vier als snijpunt van AK-rechten Voorbeeld: C 1 a v 1 C C 3 f 4 d b 3 w x 7 c p.17/34
18 Moeilijk geval Soms is de regel van 4 onvoldoende: a v 1 d x 4 5 e w b f c Stelling: Regel van 4 volstaat voor enkelvoudige mechanismen ( graad - uitbreiding van het vier-staven-mechanisme ) p.18/34
19 Starre staafconstructies (infinitesimaal) star beweging: minimaal aantal staven: slechte spreiding: goede spreiding: Laman-criterium: voor ieder deel: p.19/34
20 Driehoek-constructie Infinitesimale deformatie:,, A.K. hoekpunten collineair met starre driehoek: C 13 C C 3 infinitesimaal vervormbaar: C 13 C 1 1 C p./34
21 Prisma-constructie en : centra voor driehoeken : centra voor verbindingen Infinitesimale deformatie: A.K. verbindingslijnen concurrent starre constructie: C? 1 C 3 3 C 13 C C 14 C 5 C? infinitesimaal vervormbaar: C 3 C 13 3 C 1! 1 C C 15 C C 5 p.1/34

22 of p./34 De projectieve ruimte of projectieve punt: projectieve vlak: : vlak op :
23 lijncoördinaten in 3D Rechte in 3D: bepaald door richting en een punt moment van (rond ): r O l P homogene coördinaten voor : gestandaardiseerd: ( oriëntaties mogelijk) Grassmann-Plücker-relatie: p.3/34
24 Uitwendige product in IR : gegeven 4-vectoren en met en opvatten als homogene coördinaten: : lijncoördinaten voor Merk op: Indien we in p.4/34
25 ) Eigenschappen opnieuw anti-symmetrisch en bilineair p.5/34 (rechte op rechte door de oorsprong:
26 p.6/34 Nog meer met collineair geeft niet collineair coördinaten voor
27 p.7/34 punt rechte IR IR punt rechte met Eigenschap:
28 Sommen van rechten in 3D Stel en twee 6-vectoren van homogene coördinaten voor de rechten en in (GP geldt!) twee gevallen: en coplanair hetzelfde vlak) en niet coplanair voldoet aan GP (rechte in voldoet niet aan GP Gevolg: door punt voldoet aan GP (rechte door ). p.8/34
29 Theorema van Poinsot Stel: een 6-vector die niet aan GP voldoet we kunnen steeds ontbinden als waar voldoet aan GP ( centrale as ) en overeenkomt met de rechte op van vlakken. p.9/34
30 Kinematica in 3D Rotatie rond georiënteerde as centrum: met : standaardcoördinaten voor : radiale hoeksnelheid beweging in punt : met hoeksnelheid Translatie met constante snelheid centrum: (rechte op beweging in punt : ) p.3/34
31 Algemene starre beweging Ogenblikkelijke beweging voor star object : Poinsot 3 soorten inf. starre bewegingen: rotatie, translatie en schroefbeweging p.31/34
32 Samenstelling van bewegingen resulterend centrum: Voorbeeld: chinese slang: verticale rotatieassen kop blijft horizontaal p.3/34
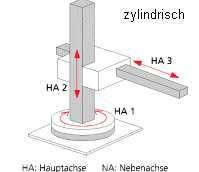
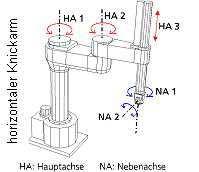
33 Industriële robots = kinematische keten met draai- en/of schuifscharnieren aandrijving scharnieren beweging grijper (of... ): ( : scharniercoördinaten; : centrum voor grijper) Merk op: Er zijn minstens 6 scharnieren nodig om alle bewegingen voor de grijper te genereren. singulariteit: positie waarin de (6) scharniercoördinaten lineair afhankelijk worden. p.33/34
34 Voorbeelden p.34/34
Projectieve Meetkunde en Mechanica in het Vlak
 Projectieve Meetkunde en Mechanica in het Vlak Rudi Penne Inleiding De idee om bij mechanische toepassingen Projectieve Meetkunde te gebruiken, en in het bijzonder homogene coördinaten, is al meer dan
Projectieve Meetkunde en Mechanica in het Vlak Rudi Penne Inleiding De idee om bij mechanische toepassingen Projectieve Meetkunde te gebruiken, en in het bijzonder homogene coördinaten, is al meer dan
Projectieve meetkunde en mechanica in het vlak
 Robotarmen moeten kunnen bewegen, vakwerkconstructies juist niet. In die zin lijkt het verschil tussen beiden onoverbrugbaar. Maar projectieve meetkunde blijkt zowel de robotarmen als de vakwerkconstructies
Robotarmen moeten kunnen bewegen, vakwerkconstructies juist niet. In die zin lijkt het verschil tussen beiden onoverbrugbaar. Maar projectieve meetkunde blijkt zowel de robotarmen als de vakwerkconstructies
PROJECT 1: Kinematics of a four-bar mechanism
 KINEMATICA EN DYNAMICA VAN MECHANISMEN PROJECT 1: Kinematics of a four-bar mechanism Lien De Dijn en Celine Carbonez 3 e bachelor in de Ingenieurswetenschappen: Werktuigkunde-Elektrotechniek Prof. Dr.
KINEMATICA EN DYNAMICA VAN MECHANISMEN PROJECT 1: Kinematics of a four-bar mechanism Lien De Dijn en Celine Carbonez 3 e bachelor in de Ingenieurswetenschappen: Werktuigkunde-Elektrotechniek Prof. Dr.
kinematisch en statisch (on) bepaaldheid Noodzakelijk aantal opleggingen, graad van statisch onbepaaldheid Hans Welleman 1
 bepaaldheid Noodzakelijk aantal opleggingen, graad van statisch onbepaaldheid Hans Welleman 1") kinematisch en statisch (on) bepaaldheid Noodzakelijk aantal opleggingen, graad van statisch onbepaaldheid Hans Welleman 1 PLAATSVASTE STARRE LICHAMEN Rotatie Centrum Horizontale roloplegging Verticale
kinematisch en statisch (on) bepaaldheid Noodzakelijk aantal opleggingen, graad van statisch onbepaaldheid Hans Welleman 1 PLAATSVASTE STARRE LICHAMEN Rotatie Centrum Horizontale roloplegging Verticale
Affiene ruimten. Oefeningen op hoofdstuk Basistellingen
 Oefeningen op hoofdstuk Affiene ruimten. Basistellingen Oefening.. Er zijn maar een eindig aantal lineaire afbeeldingen op een eindigdimensionale vectorruimte F n q over een eindig veld F q. Tel het aantal
Oefeningen op hoofdstuk Affiene ruimten. Basistellingen Oefening.. Er zijn maar een eindig aantal lineaire afbeeldingen op een eindigdimensionale vectorruimte F n q over een eindig veld F q. Tel het aantal
Lineaire afbeeldingen
 Les 2 Lineaire afbeeldingen Als een robot bij de robocup (het voetbaltoernooi voor robots een doelpunt wil maken moet hij eerst in de goede positie komen, d.w.z. geschikt achter de bal staan. Hiervoor
Les 2 Lineaire afbeeldingen Als een robot bij de robocup (het voetbaltoernooi voor robots een doelpunt wil maken moet hij eerst in de goede positie komen, d.w.z. geschikt achter de bal staan. Hiervoor
2.1 Bepaling van een eenparige rechtlijnige beweging...39
 Inhoudsopgave Voorwoord... 3 KINEMATICA...17 1 Inleidende begrippen...19 1.1 Rust en beweging van een punt...19 1.1.1 Toestand van beweging...19 1.1.2 Toestand van rust...20 1.1.3 Positie van een punt...20
Inhoudsopgave Voorwoord... 3 KINEMATICA...17 1 Inleidende begrippen...19 1.1 Rust en beweging van een punt...19 1.1.1 Toestand van beweging...19 1.1.2 Toestand van rust...20 1.1.3 Positie van een punt...20
PROJECT 4: Kinematics of Stephenson 2 mechanism
 KINEMATICA EN DYNAMICA VAN MECHANISMEN PROJECT 4: Kinematics of Stephenson 2 mechanism ien De Dijn en Celine Carbonez 3 e bachelor in de Ingenieurswetenschappen: Werktuigkunde-Elektrotechniek Prof. Dr.
KINEMATICA EN DYNAMICA VAN MECHANISMEN PROJECT 4: Kinematics of Stephenson 2 mechanism ien De Dijn en Celine Carbonez 3 e bachelor in de Ingenieurswetenschappen: Werktuigkunde-Elektrotechniek Prof. Dr.
Meetkunde en Algebra Een korte beschrijving van de inhoud
 Meetkunde en Algebra Een korte beschrijving van de inhoud Lineaire algebra maakt een betrekkelijk eenvoudige behandeling van de meetkunde in een vlak of de ruimte mogelijk. Omgekeerd illustreren meetkundige
Meetkunde en Algebra Een korte beschrijving van de inhoud Lineaire algebra maakt een betrekkelijk eenvoudige behandeling van de meetkunde in een vlak of de ruimte mogelijk. Omgekeerd illustreren meetkundige
Inhoudsopgave. Voorwoord... Lijst van tabellen... Lijst van symbolen... Deel I Vectorrekening 1
 Voorwoord.................................... Lijst van tabellen................................. Lijst van symbolen................................ v xv xvii Deel I Vectorrekening 1 1 Vectoren, bewerkingen,
Voorwoord.................................... Lijst van tabellen................................. Lijst van symbolen................................ v xv xvii Deel I Vectorrekening 1 1 Vectoren, bewerkingen,
Analytische Meetkunde. Lieve Houwaer, Unit informatie, team wiskunde
 Analytische Meetkunde Lieve Houwaer, Unit informatie, team wiskunde . VECTOREN EN RECHTEN.. Vectoren... Het vectorbegrip De verzameling punten van het vlak noteren we door π. Kies in het vlak π een vast
Analytische Meetkunde Lieve Houwaer, Unit informatie, team wiskunde . VECTOREN EN RECHTEN.. Vectoren... Het vectorbegrip De verzameling punten van het vlak noteren we door π. Kies in het vlak π een vast
Vectormeetkunde in R 3
 Vectormeetkunde in R Definitie. Een punt in R wordt gegeven door middel van drie coördinaten : P = (x, y, z). Een lijnstuk tussen twee punten P en Q voorzien van een richting noemen we een pijltje. Notatie
Vectormeetkunde in R Definitie. Een punt in R wordt gegeven door middel van drie coördinaten : P = (x, y, z). Een lijnstuk tussen twee punten P en Q voorzien van een richting noemen we een pijltje. Notatie
Hoofdstuk 1. Projectief vlak. 1.1 Het gecompleteerd affien vlak
 Hoofdstuk 1 Projectief vlak 1.1 Het gecompleteerd affien vlak We kiezen in R, E O, + een coördinatenstelsel met assen X, Y en Z. Het punt E(1, 1, 1) bepaalt de ijken op X-as, Y -as en Z-as. We beschouwen
Hoofdstuk 1 Projectief vlak 1.1 Het gecompleteerd affien vlak We kiezen in R, E O, + een coördinatenstelsel met assen X, Y en Z. Het punt E(1, 1, 1) bepaalt de ijken op X-as, Y -as en Z-as. We beschouwen
Gravitatie en kosmologie
 Gravitatie en kosmologie FEW Cursus Jo van den Brand & Joris van Heijningen Speciale relativiteitstheorie: september 015 Copyright (C) Vrije Universiteit 009 Inhoud Inleiding Overzicht Klassieke mechanica
Gravitatie en kosmologie FEW Cursus Jo van den Brand & Joris van Heijningen Speciale relativiteitstheorie: september 015 Copyright (C) Vrije Universiteit 009 Inhoud Inleiding Overzicht Klassieke mechanica
Gravitatie en kosmologie
 Gravitatie en kosmologie FEW Cursus Jo van den Brand & Joris van Heijningen Speciale relativiteitstheorie: 30 september 013 Inhoud Inleiding Overzicht Klassieke mechanica Galileo, Newton Lagrange formalisme
Gravitatie en kosmologie FEW Cursus Jo van den Brand & Joris van Heijningen Speciale relativiteitstheorie: 30 september 013 Inhoud Inleiding Overzicht Klassieke mechanica Galileo, Newton Lagrange formalisme
Een korte beschrijving van de inhoud
 Een korte beschrijving van de inhoud Lineaire algebra maakt een betrekkelijk eenvoudige behandeling van de meetkunde in een vlak of de ruimte mogelijk. Omgekeerd illustreren meetkundige toepassingen op
Een korte beschrijving van de inhoud Lineaire algebra maakt een betrekkelijk eenvoudige behandeling van de meetkunde in een vlak of de ruimte mogelijk. Omgekeerd illustreren meetkundige toepassingen op
Stelling 1.5 Geven isometrieën J 1 en J 2 hetzelfde beeld in drie punten die niet op één lijn liggen, dan zijn ze identiek. Bewijs. De isometrie J 1 2
 Lesbrief 8 Isometrieën 1 Inleiding Een één-éénduidige afbeelding van het vlak op zichzelf heet een transformatie van het vlak. Als T 1 en T 2 transformaties zijn, wordt de transformatie T 1 gevolgd door
Lesbrief 8 Isometrieën 1 Inleiding Een één-éénduidige afbeelding van het vlak op zichzelf heet een transformatie van het vlak. Als T 1 en T 2 transformaties zijn, wordt de transformatie T 1 gevolgd door
Dan is de afstand A B = lengte van lijnstuk [A B]: AB = x x )² + ( y ²
![Dan is de afstand A B = lengte van lijnstuk [A B]: AB = x x )² + ( y ²](/thumbs/54/34123992.jpg "Dan is de afstand A B = lengte van lijnstuk [A B]: AB = x x )² + ( y ²") 1 Herhaling 1.1 Het vlak, punten, afstand, midden Opdracht: Teken in het vlak de punten: A ( 1, 2) B(3,6) C( 5,7) Bepaal de coördinaat van het midden van (lijnstuk) [A B]: M [B C ]: N Bepaal de afstand
1 Herhaling 1.1 Het vlak, punten, afstand, midden Opdracht: Teken in het vlak de punten: A ( 1, 2) B(3,6) C( 5,7) Bepaal de coördinaat van het midden van (lijnstuk) [A B]: M [B C ]: N Bepaal de afstand
Oefeningen analytische meetkunde
 Oefeningen analytische meetkunde ) orte herhaling. Zij gegeven twee vectoren P en Q. Bewijs dat de loodrechte projectie P' van P op Q gegeven wordt door: PQQ P'. Q. De cirkel c y 4y wordt gespiegeld om
Oefeningen analytische meetkunde ) orte herhaling. Zij gegeven twee vectoren P en Q. Bewijs dat de loodrechte projectie P' van P op Q gegeven wordt door: PQQ P'. Q. De cirkel c y 4y wordt gespiegeld om
Eigenschappen en Axioma s van de E 6 -meetkunde
 Faculteit Wetenschappen Vakgroep Wiskunde Eigenschappen en Axioma s van de E 6 -meetkunde Magali Victoor Promotor: Prof. dr. Hendrik Van Maldeghem Masterproef ingediend tot het behalen van de academische
Faculteit Wetenschappen Vakgroep Wiskunde Eigenschappen en Axioma s van de E 6 -meetkunde Magali Victoor Promotor: Prof. dr. Hendrik Van Maldeghem Masterproef ingediend tot het behalen van de academische
5 Inleiding tot de groepentheorie
 5 Inleiding tot de groepentheorie Oefening 5.1. Stel de Cayleytabel op voor de groep van de symmetrieën van een vierkant. Bewijs dat deze groep de viergroep van Klein bezit als deelgroep van index 2. Oplossing
5 Inleiding tot de groepentheorie Oefening 5.1. Stel de Cayleytabel op voor de groep van de symmetrieën van een vierkant. Bewijs dat deze groep de viergroep van Klein bezit als deelgroep van index 2. Oplossing
voorkennis wiskunde voor Farmaceutische wetenschappen en Biomedische wetenschappen
 Onderstaand overzicht volgt de structuur van het boek Wiskundige basisvaardigheden met bijhorende website. Per hoofdstuk wordt de strikt noodzakelijke voorkennis opgelijst: dit is leerstof die gekend wordt
Onderstaand overzicht volgt de structuur van het boek Wiskundige basisvaardigheden met bijhorende website. Per hoofdstuk wordt de strikt noodzakelijke voorkennis opgelijst: dit is leerstof die gekend wordt
Vectoranalyse voor TG
 college 11 collegejaar college build slides Vandaag : : : : 17-18 11 23 oktober 2017 35 De sterrennacht Vincent van Gogh, 1889 1 2 3 4 5 Verband met de stelling van n 1 VA intro ection 16.7 Definitie Equation
college 11 collegejaar college build slides Vandaag : : : : 17-18 11 23 oktober 2017 35 De sterrennacht Vincent van Gogh, 1889 1 2 3 4 5 Verband met de stelling van n 1 VA intro ection 16.7 Definitie Equation
Samenvatting wiskunde havo 4 hoofdstuk 5,7,8 en vaardigheden 3 en 4 en havo 5 hoofdstuk 3 en 5 Hoofdstuk 5 afstanden en hoeken Voorkennis Stelling van
 Samenvatting wiskunde havo 4 hoofdstuk 5,7,8 en vaardigheden 3 en 4 en havo 5 hoofdstuk 3 en 5 Hoofdstuk 5 afstanden en hoeken Stelling van Kan alleen bij rechthoekige driehoeken pythagoras a 2 + b 2 =
Samenvatting wiskunde havo 4 hoofdstuk 5,7,8 en vaardigheden 3 en 4 en havo 5 hoofdstuk 3 en 5 Hoofdstuk 5 afstanden en hoeken Stelling van Kan alleen bij rechthoekige driehoeken pythagoras a 2 + b 2 =
Paragraaf 10.1 : Vectoren en lijnen
 Hoofdstuk 10 Meetkunde met Vectoren (V5 Wis B) Pagina 1 van 13 Paragraaf 10.1 : Vectoren en lijnen Les 1 : Vectoren tekenen Definities Vector x = ( a ) wil zeggen a naar rechts en b omhoog. b Je kunt vectoren
Hoofdstuk 10 Meetkunde met Vectoren (V5 Wis B) Pagina 1 van 13 Paragraaf 10.1 : Vectoren en lijnen Les 1 : Vectoren tekenen Definities Vector x = ( a ) wil zeggen a naar rechts en b omhoog. b Je kunt vectoren
Speciale relativiteitstheorie
 Speciale relativiteitstheorie en hoe u die zelf had kunnen bedenken. HOVO Utrecht Les 3 en 4: Lorentz Transformatie en Mechanica Dr. Harm van der Lek vdlek@vdlek.nl Natuurkunde hobbyist Programma 1 1.
Speciale relativiteitstheorie en hoe u die zelf had kunnen bedenken. HOVO Utrecht Les 3 en 4: Lorentz Transformatie en Mechanica Dr. Harm van der Lek vdlek@vdlek.nl Natuurkunde hobbyist Programma 1 1.
Module 1 Uitwerkingen van de opdrachten
 1 kn Module 1 en van de opdrachten F R Opdracht 1 Bepaal de resultante in horizontale en verticale richting: F H 0 6 4 kn dus naar rechts F V 0 4 1 kn dus omhoog De resultante wordt m.b.v. de stelling
1 kn Module 1 en van de opdrachten F R Opdracht 1 Bepaal de resultante in horizontale en verticale richting: F H 0 6 4 kn dus naar rechts F V 0 4 1 kn dus omhoog De resultante wordt m.b.v. de stelling
HOOFDSTUK 2 TRANSFORMATIES
 HOOFDSTUK 2 TRANSFORMATIES Verschuiven, roteren, spiegelen, vergroten/verkleinen zijn manieren om bij een figuur een 'beeldfiguur' te bepalen. Deze manieren noem je 'transformaties'. 2.1 LIJNSPIEGELING
HOOFDSTUK 2 TRANSFORMATIES Verschuiven, roteren, spiegelen, vergroten/verkleinen zijn manieren om bij een figuur een 'beeldfiguur' te bepalen. Deze manieren noem je 'transformaties'. 2.1 LIJNSPIEGELING
Pascal en de negenpuntskegelsnede
 Pascal en de negenpuntskegelsnede De zijden van driehoek ABC hierboven vatten we op als lijnen en niet als lijnstukken. De middens van de lijnstukken AB, BC en CA zijn D, E en F. De middens van de lijnstukken
Pascal en de negenpuntskegelsnede De zijden van driehoek ABC hierboven vatten we op als lijnen en niet als lijnstukken. De middens van de lijnstukken AB, BC en CA zijn D, E en F. De middens van de lijnstukken
Examen VWO. wiskunde B (pilot) tijdvak 1 woensdag 18 mei uur
 tijdvak 1 woensdag 18 mei uur") Eamen VW 016 tijdvak 1 woensdag 18 mei 13.30-16.30 uur wiskunde (pilot) it eamen bestaat uit 16 vragen. Voor dit eamen zijn maimaal 79 punten te behalen. Voor elk vraagnummer staat hoeveel punten met een
Eamen VW 016 tijdvak 1 woensdag 18 mei 13.30-16.30 uur wiskunde (pilot) it eamen bestaat uit 16 vragen. Voor dit eamen zijn maimaal 79 punten te behalen. Voor elk vraagnummer staat hoeveel punten met een
Projectieve Meetkunde
 Projectieve Meetkunde W M O p W L A M A door H.Finkelnberg en M.Lübke Inhoudsopgave 1 Projectieve ruimtes 4 1.1 De categorie der projectieve ruimtes.......................... 4 1.1.1 De verzamelingen.................................
Projectieve Meetkunde W M O p W L A M A door H.Finkelnberg en M.Lübke Inhoudsopgave 1 Projectieve ruimtes 4 1.1 De categorie der projectieve ruimtes.......................... 4 1.1.1 De verzamelingen.................................
Wat verstaan we onder elementaire meetkunde?
 Wat verstaan we onder elementaire meetkunde? Er zijn veel boeken met de titel 'Elementaire Meetkunde'. Niet alle auteurs verstaan hieronder hetzelfde. Dit boek behandelt in de eerste 1 hoofdstukken de
Wat verstaan we onder elementaire meetkunde? Er zijn veel boeken met de titel 'Elementaire Meetkunde'. Niet alle auteurs verstaan hieronder hetzelfde. Dit boek behandelt in de eerste 1 hoofdstukken de
Morenaments Ornamenten met symmetrie. Werkblad vooraf met begeleidende tekst en oplossingen
 Morenaments Ornamenten met symmetrie Fien Aelter, Liesje Knaepen en Kristien Vanhuyse, studenten SLO wiskunde KU Leuven Werkblad vooraf met begeleidende tekst en oplossingen Dit werklad is een voorbereiding
Morenaments Ornamenten met symmetrie Fien Aelter, Liesje Knaepen en Kristien Vanhuyse, studenten SLO wiskunde KU Leuven Werkblad vooraf met begeleidende tekst en oplossingen Dit werklad is een voorbereiding
GEOGEBRA 5. Ruimtemeetkunde in de tweede graad. R. Van Nieuwenhuyze. Hoofdlector wiskunde aan Odisee, Brussel. Auteur Van Basis tot Limiet.
 GEOGEBRA 5 Ruimtemeetkunde in de tweede graad R. Van Nieuwenhuyze Hoofdlector wiskunde aan Odisee, Brussel Auteur Van Basis tot Limiet. roger.van.nieuwenhuyze@gmail.com GeoGebra in de tweede graad Roger
GEOGEBRA 5 Ruimtemeetkunde in de tweede graad R. Van Nieuwenhuyze Hoofdlector wiskunde aan Odisee, Brussel Auteur Van Basis tot Limiet. roger.van.nieuwenhuyze@gmail.com GeoGebra in de tweede graad Roger
Symmetrische betegelingen op de bol en in het vlak
 Symmetrische betegelingen op de bol en in het vlak Jan van de Craats (UvA) NWD, 4 februari 2012 Symmetrie Symmetrie Inspiratiebron: John H. Conway, Heidi Burgiel, Chaim Goodman-Strauss, The Symmetries
Symmetrische betegelingen op de bol en in het vlak Jan van de Craats (UvA) NWD, 4 februari 2012 Symmetrie Symmetrie Inspiratiebron: John H. Conway, Heidi Burgiel, Chaim Goodman-Strauss, The Symmetries
Hints en antwoorden bij de vragen van de cursus Lineaire Algebra en Meetkunde
 Hints en antwoorden bij de vragen van de cursus Lineaire Algebra en Meetkunde Ik heb de vragen die in de nota s staan en de vragen van de samenvattingen samengebracht in deze tekst en voorzien van hints
Hints en antwoorden bij de vragen van de cursus Lineaire Algebra en Meetkunde Ik heb de vragen die in de nota s staan en de vragen van de samenvattingen samengebracht in deze tekst en voorzien van hints
Examenvragen Meetkunde en lineaire algebra Tweede examenperiode
 Examenvragen Meetkunde en lineaire algebra Tweede examenperiode 2008-2009 Een rechte conoïde met als richtrechte de X-as, en als richtoppervlak de sfeer met middelpunt in (0, 16, 0) en straal 9. (1) Stel
Examenvragen Meetkunde en lineaire algebra Tweede examenperiode 2008-2009 Een rechte conoïde met als richtrechte de X-as, en als richtoppervlak de sfeer met middelpunt in (0, 16, 0) en straal 9. (1) Stel
Elementaire Deeltjesfysica
 Elementaire Deeltjesfysica FEW Cursus Jo van den Brand 10 November, 2009 Structuur der Materie Inhoud Inleiding Deeltjes Interacties Relativistische kinematica Lorentz transformaties Viervectoren Energie
Elementaire Deeltjesfysica FEW Cursus Jo van den Brand 10 November, 2009 Structuur der Materie Inhoud Inleiding Deeltjes Interacties Relativistische kinematica Lorentz transformaties Viervectoren Energie
Niet-euclidische meetkunde. Les 3 Meetkunde op de bol
 Niet-euclidische meetkunde Les 3 Meetkunde op de bol (Deze les sluit aan bij de paragrafen 2.1 en 2.2 van de tekst Niet-Euclidische meetkunde van de Wageningse Methode) Kun je het vijfde postulaat afleiden
Niet-euclidische meetkunde Les 3 Meetkunde op de bol (Deze les sluit aan bij de paragrafen 2.1 en 2.2 van de tekst Niet-Euclidische meetkunde van de Wageningse Methode) Kun je het vijfde postulaat afleiden
Een passie voor SYMMETRIE
 Een passie voor SYMMETRIE Jan van de Craats (UvA) NWD, 6 februari 2016 Soorten symmetrische patronen en voorwerpen Soorten symmetrische patronen en voorwerpen Rozetpatronen (2 soorten) Soorten symmetrische
Een passie voor SYMMETRIE Jan van de Craats (UvA) NWD, 6 februari 2016 Soorten symmetrische patronen en voorwerpen Soorten symmetrische patronen en voorwerpen Rozetpatronen (2 soorten) Soorten symmetrische
Dualiteit. Raymond van Bommel. 6 april 2010
 Dualiteit Raymond van Bommel 6 april 2010 1 Inleiding Op veel manieren kan meetkunde worden bedreven. De bekendste en meest gebruikte meetkunde is de Euclidische meetkunde. In dit artikel gaan we kijken
Dualiteit Raymond van Bommel 6 april 2010 1 Inleiding Op veel manieren kan meetkunde worden bedreven. De bekendste en meest gebruikte meetkunde is de Euclidische meetkunde. In dit artikel gaan we kijken
Ruimtewiskunde. college. Het inwendig- en het uitwendig product. Vandaag. Hoeken Orthogonaliteit en projecties. Toepassing: magnetische velden
 college 2 - en het uitwendig collegejaar college build slides Vandaag : : : : 6-7 2 30 mei 207 30 2 3 4 5 Hoeken Orthogonaliteit en projecties Toepassing: magnetische velden.6-7[2] vandaag meetkundig Section
college 2 - en het uitwendig collegejaar college build slides Vandaag : : : : 6-7 2 30 mei 207 30 2 3 4 5 Hoeken Orthogonaliteit en projecties Toepassing: magnetische velden.6-7[2] vandaag meetkundig Section
14.0 Voorkennis. sin sin sin. Sinusregel: In elke ABC geldt de sinusregel:
 14.0 Voorkennis Sinusregel: In elke ABC geldt de sinusregel: a b c sin sin sin Voorbeeld 1: Gegeven is ΔABC met c = 1, α = 54 en β = 6 Bereken a in twee decimalen nauwkeurig. a c sin sin a 1 sin54 sin64
14.0 Voorkennis Sinusregel: In elke ABC geldt de sinusregel: a b c sin sin sin Voorbeeld 1: Gegeven is ΔABC met c = 1, α = 54 en β = 6 Bereken a in twee decimalen nauwkeurig. a c sin sin a 1 sin54 sin64
IJkingstoets Wiskunde-Informatica-Fysica juli 2019: algemene feedback
 IJkingstoets Wiskunde-Informatica-Fsica juli 9 - reeks - p. IJkingstoets Wiskunde-Informatica-Fsica juli 9: algemene feedback Positionering ten opzichte van andere deelnemers In totaal namen 58 studenten
IJkingstoets Wiskunde-Informatica-Fsica juli 9 - reeks - p. IJkingstoets Wiskunde-Informatica-Fsica juli 9: algemene feedback Positionering ten opzichte van andere deelnemers In totaal namen 58 studenten
Bewerkingen met krachten
 21 Bewerkingen met krachten Opgeloste Vraagstukken 2.1. Bepaal het moment van de kracht van 2N uir Fig. 2-3 rond het punt O. Laat de loodrechte OD neer vanuit O op de rechte waarlangs de kracht van 2N
21 Bewerkingen met krachten Opgeloste Vraagstukken 2.1. Bepaal het moment van de kracht van 2N uir Fig. 2-3 rond het punt O. Laat de loodrechte OD neer vanuit O op de rechte waarlangs de kracht van 2N
x D In de punten A en B grijpt respectivelijk een vertikale constante kracht F 1 en F 2 aan.
 VRIJE UNIVERSITEIT RUSSE FUTEIT TOEGEPSTE WETENSHPPEN NYTISHE MEHNI I Tentamen 1ste Kandidatuur urgerlijk Ingenieur cademiejaar 00-00 4 januari 00 Vraag : F1 γ β F ovenstaand stelsel bestaat uit twee identieke
VRIJE UNIVERSITEIT RUSSE FUTEIT TOEGEPSTE WETENSHPPEN NYTISHE MEHNI I Tentamen 1ste Kandidatuur urgerlijk Ingenieur cademiejaar 00-00 4 januari 00 Vraag : F1 γ β F ovenstaand stelsel bestaat uit twee identieke
2IV10 Instructie 3: Transformaties en viewing
 2IV0 Instructie 3: Transformaties en viewing. Gegeven een vierkant met ribbe, waarvan de linkeronderhoek in de oorsprong ligt. α s O C B A a. Geef een transformatiematrix waarmee dit vierkant wordt getransformeerd
2IV0 Instructie 3: Transformaties en viewing. Gegeven een vierkant met ribbe, waarvan de linkeronderhoek in de oorsprong ligt. α s O C B A a. Geef een transformatiematrix waarmee dit vierkant wordt getransformeerd
Een wiskundige kijk op SYMMETRIE
 Een wiskundige kijk op SYMMETRIE Jan van de Craats (UvA) Koninklijk Genootschap Physica, Alkmaar, 5 maart 2018 Symmetrie op het boloppervlak Soorten symmetrische patronen en voorwerpen Soorten symmetrische
Een wiskundige kijk op SYMMETRIE Jan van de Craats (UvA) Koninklijk Genootschap Physica, Alkmaar, 5 maart 2018 Symmetrie op het boloppervlak Soorten symmetrische patronen en voorwerpen Soorten symmetrische
Opgaven bij de cursus Relativiteitstheorie wiskunde voorkennis Najaar 2018 Docent: Dr. H. (Harm) van der Lek
 van der Lek") Opgaven bij de cursus Relativiteitstheorie wiskunde voorkennis Najaar 2018 Docent: Dr. H. (Harm) van der Lek Uitwerkingen worden beschikbaar gesteld op de dinsdagavond voorafgaande aan het volgende college
Opgaven bij de cursus Relativiteitstheorie wiskunde voorkennis Najaar 2018 Docent: Dr. H. (Harm) van der Lek Uitwerkingen worden beschikbaar gesteld op de dinsdagavond voorafgaande aan het volgende college
FACULTEIT ECONOMIE EN BEDRIJFSKUNDE Afdeling Kwantitatieve Economie
 FACULTEIT ECONOMIE EN BEDRIJFSKUNDE Afdeling Kwantitatieve Economie Lineaire Algebra, tentamen Uitwerkingen vrijdag 4 januari 0, 9 uur Gebruik van een formuleblad of rekenmachine is niet toegestaan. De
FACULTEIT ECONOMIE EN BEDRIJFSKUNDE Afdeling Kwantitatieve Economie Lineaire Algebra, tentamen Uitwerkingen vrijdag 4 januari 0, 9 uur Gebruik van een formuleblad of rekenmachine is niet toegestaan. De
8.1 Rekenen met complexe getallen [1]
![8.1 Rekenen met complexe getallen [1]](/thumbs/57/40136599.jpg "8.1 Rekenen met complexe getallen [1]") 8.1 Rekenen met complexe getallen [1] Natuurlijke getallen: Dit zijn alle positieve gehele getallen en nul. 0, 1, 2, 3, 4, 5, 6,... Het symbool voor de natuurlijke getallen is Gehele getallen: Dit zijn
8.1 Rekenen met complexe getallen [1] Natuurlijke getallen: Dit zijn alle positieve gehele getallen en nul. 0, 1, 2, 3, 4, 5, 6,... Het symbool voor de natuurlijke getallen is Gehele getallen: Dit zijn
x cos α y sin α . (1) x sin α + y cos α We kunnen dit iets anders opschrijven, namelijk als x x y sin α
 x sin α + y cos α We kunnen dit iets anders opschrijven, namelijk als x x y sin α") Lineaire afbeeldingen Rotatie in dimensie 2 Beschouw het platte vlak dat we identificeren met R 2 Kies een punt P in dit vlak met coördinaten (, y) Stel dat we het vlak roteren met de oorsprong (0, 0)
Lineaire afbeeldingen Rotatie in dimensie 2 Beschouw het platte vlak dat we identificeren met R 2 Kies een punt P in dit vlak met coördinaten (, y) Stel dat we het vlak roteren met de oorsprong (0, 0)
Lineaire algebra en analytische meetkunde
 Lineaire algebra en analytische meetkunde John Val August 1, 11 Inhoud 1 Projectieve meetkunde 1 i Inhoud 1 Projectieve meetkunde Figure 1: De blik op oneindig Snijden de spoorstaven? Een vloer van gelijke
Lineaire algebra en analytische meetkunde John Val August 1, 11 Inhoud 1 Projectieve meetkunde 1 i Inhoud 1 Projectieve meetkunde Figure 1: De blik op oneindig Snijden de spoorstaven? Een vloer van gelijke
11 De hoed van Napoleon
 11 De hoed van Napoleon 11.1 Historiek Napoleon Bonaparte (1769-1821) was van Italiaanse afkomst en begon zijn carrière als onderluitenant in de artillerie en klom op tot Frans generaal. Op zijn dertigste
11 De hoed van Napoleon 11.1 Historiek Napoleon Bonaparte (1769-1821) was van Italiaanse afkomst en begon zijn carrière als onderluitenant in de artillerie en klom op tot Frans generaal. Op zijn dertigste
3 Cirkels, Hoeken en Bogen. Inversies.
 3 Cirkels, Hoeken en Bogen. Inversies. 3.1. Inleiding Het derde college betreft drie onderwerpen (hoeken, bogen en inversies), die in concrete meetkundige situaties vaak optreden. Dit hoofdstuk is bedoeld
3 Cirkels, Hoeken en Bogen. Inversies. 3.1. Inleiding Het derde college betreft drie onderwerpen (hoeken, bogen en inversies), die in concrete meetkundige situaties vaak optreden. Dit hoofdstuk is bedoeld
10.0 Voorkennis. cos( ) = -cos( ) = -½ 3. [cos is x-coördinaat] sin( ) = -sin( ) = -½ 3. [sin is y-coördinaat] Willem-Jan van der Zanden
![10.0 Voorkennis. cos( ) = -cos( ) = -½ 3. [cos is x-coördinaat] sin( ) = -sin( ) = -½ 3. [sin is y-coördinaat] Willem-Jan van der Zanden](/thumbs/91/105289633.jpg "10.0 Voorkennis. cos( ) = -cos( ) = -½ 3. [cos is x-coördinaat] sin( ) = -sin( ) = -½ 3. [sin is y-coördinaat] Willem-Jan van der Zanden") 10.0 Voorkennis 5 1 6 6 cos( ) = -cos( ) = -½ 3 [cos is x-coördinaat] 5 1 3 3 sin( ) = -sin( ) = -½ 3 [sin is y-coördinaat] 1 Voorbeeld 1: Getekend is de lijn k: y = ½x 1. De richtingshoek α van de lijn
10.0 Voorkennis 5 1 6 6 cos( ) = -cos( ) = -½ 3 [cos is x-coördinaat] 5 1 3 3 sin( ) = -sin( ) = -½ 3 [sin is y-coördinaat] 1 Voorbeeld 1: Getekend is de lijn k: y = ½x 1. De richtingshoek α van de lijn
Eindexamen wiskunde B havo II
 Opgave 1 Een functie e functie f is gegeven door figuur 1 2x 40 f (x) =, waarbij x 19. x 19 In figuur 1 en op de bijlage is de grafiek getekend van f en de verticale asymptoot x = 19. 6p 1 Los op: 0
Opgave 1 Een functie e functie f is gegeven door figuur 1 2x 40 f (x) =, waarbij x 19. x 19 In figuur 1 en op de bijlage is de grafiek getekend van f en de verticale asymptoot x = 19. 6p 1 Los op: 0
OOG VOOR SYMMETRIE. Een wiskundige passie
 OOG VOOR SYMMETRIE Een wiskundige passie Jan van de Craats (UvA) Ars et Mathesis, 16 november 2013 Twee soorten rozetpatronen Twee soorten rozetpatronen Twee soorten rozetpatronen Alleen draaisymmetrie
OOG VOOR SYMMETRIE Een wiskundige passie Jan van de Craats (UvA) Ars et Mathesis, 16 november 2013 Twee soorten rozetpatronen Twee soorten rozetpatronen Twee soorten rozetpatronen Alleen draaisymmetrie
relativiteitstheorie
 Algemene relativiteitstheorie HOVO cursus Jo van den Brand Les 3: 19 november 2015 Copyright (C) Vrije Universiteit 2015 Inhoud Speciale relativiteitstheorie Inertiaalsystemen Bewegende waarnemers Relativiteitsprincipe
Algemene relativiteitstheorie HOVO cursus Jo van den Brand Les 3: 19 november 2015 Copyright (C) Vrije Universiteit 2015 Inhoud Speciale relativiteitstheorie Inertiaalsystemen Bewegende waarnemers Relativiteitsprincipe
EXAMENVRAGEN RUIMTEMEETKUNDE I (niet-analytische meetkunde)
") EXAMENVRAGEN RUIMTEMEETKUNDE I (niet-analytische meetkunde). (4 p) Geef drie verschillende mogelijkheden waardoor in de driedimensionale ruimte een rechte bepaald is? 2. (6 p) Wanneer zijn de snijlijnen
EXAMENVRAGEN RUIMTEMEETKUNDE I (niet-analytische meetkunde). (4 p) Geef drie verschillende mogelijkheden waardoor in de driedimensionale ruimte een rechte bepaald is? 2. (6 p) Wanneer zijn de snijlijnen
ONBETWIST ONderwijs verbeteren met WISkunde Toetsen Voorbeeldtoetsen Lineaire Algebra Deliverable 3.10 Henk van der Kooij ONBETWIST Deliverable 3.
 ONBETWIST ONderwijs verbeteren met WISkunde Toetsen Voorbeeldtoetsen Lineaire Algebra Deliverable 3.10 Henk van der Kooij ONBETWIST Deliverable 3.8 ONBETWIST ONderwijs verbeteren met WISkunde Toetsen Inleiding
ONBETWIST ONderwijs verbeteren met WISkunde Toetsen Voorbeeldtoetsen Lineaire Algebra Deliverable 3.10 Henk van der Kooij ONBETWIST Deliverable 3.8 ONBETWIST ONderwijs verbeteren met WISkunde Toetsen Inleiding
Eindexamen vwo wiskunde B pilot 2014-I
 Eindeamen vwo wiskunde B pilot 04-I Formules Goniometrie sin( tu) sintcosu costsinu sin( tu) sintcosu costsinu cos( tu) costcosusintsinu cos( tu) costcosusintsinu sin( t) sintcost cos( t) cos tsin t cos
Eindeamen vwo wiskunde B pilot 04-I Formules Goniometrie sin( tu) sintcosu costsinu sin( tu) sintcosu costsinu cos( tu) costcosusintsinu cos( tu) costcosusintsinu sin( t) sintcost cos( t) cos tsin t cos
Basic Creative Engineering Skills
 Mechanica evenwicht en reactiekrachten November 2015 Theaterschool OTT-1 1 Stelsels van krachten Doel: het vereenvoudigen van een stelsel van meerdere krachten en momenten (paragraaf 4,7 en 4,8) November
Mechanica evenwicht en reactiekrachten November 2015 Theaterschool OTT-1 1 Stelsels van krachten Doel: het vereenvoudigen van een stelsel van meerdere krachten en momenten (paragraaf 4,7 en 4,8) November
Bruno Ernst Symposium
 Bruno Ernst Symposium Betegelingen en behanggroepen symmetrie in wiskundige termen Jeanine Daems Universiteit Leiden Voorbeelden van symmetrische figuren: wat is symmetrie in de wiskunde? symmetrie
Bruno Ernst Symposium Betegelingen en behanggroepen symmetrie in wiskundige termen Jeanine Daems Universiteit Leiden Voorbeelden van symmetrische figuren: wat is symmetrie in de wiskunde? symmetrie
Algemene relativiteitstheorie
 Algemene relativiteitstheorie HOVO cursus Jo van den Brand Les 2: 12 november 2015 Copyright (C) Vrije Universiteit 2015 Ruimte: verzameling met structuur 3D varieteit kan lokaal Euclidisch zijn 4D ruimtetijd
Algemene relativiteitstheorie HOVO cursus Jo van den Brand Les 2: 12 november 2015 Copyright (C) Vrije Universiteit 2015 Ruimte: verzameling met structuur 3D varieteit kan lokaal Euclidisch zijn 4D ruimtetijd
Eindexamen wiskunde B vwo 2010 - I
 Gelijke oppervlakten De parabool met vergelijking y = 4x x2 en de x-as sluiten een vlakdeel V in. De lijn y = ax (met 0 a < 4) snijdt de parabool in de oorsprong O en in punt. Zie. y 4 3 2 1-1 O 1 2 3
Gelijke oppervlakten De parabool met vergelijking y = 4x x2 en de x-as sluiten een vlakdeel V in. De lijn y = ax (met 0 a < 4) snijdt de parabool in de oorsprong O en in punt. Zie. y 4 3 2 1-1 O 1 2 3
Tentamen CT2031 ConstructieMechanica 3 2 april 2007 MODELUITWERKING. a) De grenzen kunnen m.b.v. de basisgevallen van Euler worden bepaald:
 De grenzen kunnen m.b.v. de basisgevallen van Euler worden bepaald:") MODELUITWERKING VRAAGSTUK : Theorie Dee a) De grenzen kunnen m.b.v. de basisgevaen van Euer worden bepaad: r 0 en k 0 : π k 4 r inf en k 0 : r inf en k inf: 4π k r 0 en k inf : De knikast kan, afhankeijk
MODELUITWERKING VRAAGSTUK : Theorie Dee a) De grenzen kunnen m.b.v. de basisgevaen van Euer worden bepaad: r 0 en k 0 : π k 4 r inf en k 0 : r inf en k inf: 4π k r 0 en k inf : De knikast kan, afhankeijk
TEKENEN IN PERSPECTIEF P.W.H. Lemmens, november 2002, revisie maart 2005
 TEKENEN IN PERSPECTIEF P.W.H. Lemmens, november 2002, revisie maart 2005 We stellen ons voor dat we een tekening maken van wat we zien door de ruimte (3- dimensionaal) af te beelden op een plat vlak (het
TEKENEN IN PERSPECTIEF P.W.H. Lemmens, november 2002, revisie maart 2005 We stellen ons voor dat we een tekening maken van wat we zien door de ruimte (3- dimensionaal) af te beelden op een plat vlak (het
IJkingstoets Wiskunde-Informatica-Fysica 29 juni Nummer vragenreeks: 1
 IJkingstoets Wiskunde-Informatica-Fysica 29 juni 206 Nummer vragenreeks: IJkingstoets wiskunde-informatica-fysica 29 juni 206 - reeks - p. /0 Oefening Welke studierichting wil je graag volgen? (vraag
IJkingstoets Wiskunde-Informatica-Fysica 29 juni 206 Nummer vragenreeks: IJkingstoets wiskunde-informatica-fysica 29 juni 206 - reeks - p. /0 Oefening Welke studierichting wil je graag volgen? (vraag
Hoofdstuk 1 LIJNEN IN. Klas 5N Wiskunde 6 perioden
 Hoofdstuk LIJNEN IN Klas N Wiskunde 6 perioden . DE VECTORVOORSTELLING VAN EEN LIJN VOORBEELD. Gegeven zijn de punten P (, ) en Q (, 8 ). Gevraagd: de vectorvoorstelling van de lijn k door P en Q. Methode:
Hoofdstuk LIJNEN IN Klas N Wiskunde 6 perioden . DE VECTORVOORSTELLING VAN EEN LIJN VOORBEELD. Gegeven zijn de punten P (, ) en Q (, 8 ). Gevraagd: de vectorvoorstelling van de lijn k door P en Q. Methode:
Introductie Lineaire Algebra Voor Computer Graphics
 Introductie Lineaire Algebra Voor Computer Graphics John Val th October Inleiding In deze cursus staat tekenen op het computerscherm en animaties van die tekeningen centraal. We willen bereiken dat je
Introductie Lineaire Algebra Voor Computer Graphics John Val th October Inleiding In deze cursus staat tekenen op het computerscherm en animaties van die tekeningen centraal. We willen bereiken dat je
Eindexamen vwo wiskunde B pilot 2013-I
 Eindeamen vwo wiskunde pilot 03-I Formules Goniometrie sin( t u) sintcosu costsinu sin( t u) sintcosu costsinu cos( t u) costcosu sintsinu cos( t u) costcosu sintsinu sin( t) sintcost cos( t) cos t sin
Eindeamen vwo wiskunde pilot 03-I Formules Goniometrie sin( t u) sintcosu costsinu sin( t u) sintcosu costsinu cos( t u) costcosu sintsinu cos( t u) costcosu sintsinu sin( t) sintcost cos( t) cos t sin
Wiskunde voor relativiteitstheorie
 Wiskunde voor relativiteitstheorie HOVO Utrecht Les 1: Goniometrie en vectoren Dr. Harm van der Lek vdlek@vdlek.nl Natuurkunde hobbyist Overzicht colleges 1. College 1 1. Goniometrie 2. Vectoren 2. College
Wiskunde voor relativiteitstheorie HOVO Utrecht Les 1: Goniometrie en vectoren Dr. Harm van der Lek vdlek@vdlek.nl Natuurkunde hobbyist Overzicht colleges 1. College 1 1. Goniometrie 2. Vectoren 2. College
Werkblad Cabri Jr. Translaties
 Werkblad Cabri Jr. Translaties Doel Kennismaken met het begrip vector en het begrip translatie (verschuiving) en de eigenschappen van een figuur en het beeld daarvan bij een translatie. De vragen vooraf
Werkblad Cabri Jr. Translaties Doel Kennismaken met het begrip vector en het begrip translatie (verschuiving) en de eigenschappen van een figuur en het beeld daarvan bij een translatie. De vragen vooraf
2010-I. A heeft de coördinaten (4 a, 4a a 2 ). Vraag 1. Toon dit aan. Gelijkstellen: y= 4x x 2 A. y= ax
. Vraag 1. Toon dit aan. Gelijkstellen: y= 4x x 2 A. y= ax") 00-I De parabool met vergelijking y = 4x x en de x-as sluiten een vlakdeel V in. De lijn y = ax (met 0 a < 4) snijdt de parabool in de oorsprong en in punt. Zie de figuur. y= 4x x y= ax heeft de coördinaten
00-I De parabool met vergelijking y = 4x x en de x-as sluiten een vlakdeel V in. De lijn y = ax (met 0 a < 4) snijdt de parabool in de oorsprong en in punt. Zie de figuur. y= 4x x y= ax heeft de coördinaten
Eindexamen wiskunde B havo II (oude stijl)
") Kassen e meeste kassen in de glastuinbouw kun je beschouwen als een aaneenschakeling van elementen die de vorm hebben van vijfzijdige prisma s zonder tussenwanden. Zie figuur 1. figuur 1 3 2 α 2 2 2 2
Kassen e meeste kassen in de glastuinbouw kun je beschouwen als een aaneenschakeling van elementen die de vorm hebben van vijfzijdige prisma s zonder tussenwanden. Zie figuur 1. figuur 1 3 2 α 2 2 2 2
Algemene relativiteitstheorie
 Algemene relativiteitstheorie HOVO cursus Jo van den Brand Les 1: 5 november 015 Copyright (C) Vrije Universiteit 015 Overzicht Docent informatie Jo van den Brand, Gideon Koekoek Email: jo@nikhef.nl, gkoekoek@gmail.com
Algemene relativiteitstheorie HOVO cursus Jo van den Brand Les 1: 5 november 015 Copyright (C) Vrije Universiteit 015 Overzicht Docent informatie Jo van den Brand, Gideon Koekoek Email: jo@nikhef.nl, gkoekoek@gmail.com
CTB1002 deel 1 - Lineaire algebra 1
 CTB1002 deel 1 - Lineaire algebra 1 College 6 27 februari 2014 1 Opbouw college Vandaag behandelen we de rest van hoofdstuk 1.8 en 1.9 Voor de pauze: hoofdstuk 1.8 Na de pauze: hoofdstuk 1.9 2 Transformatie
CTB1002 deel 1 - Lineaire algebra 1 College 6 27 februari 2014 1 Opbouw college Vandaag behandelen we de rest van hoofdstuk 1.8 en 1.9 Voor de pauze: hoofdstuk 1.8 Na de pauze: hoofdstuk 1.9 2 Transformatie
Rationale punten op elliptische krommen
 Rationale punten op elliptische krommen Anne Barten 6 juli 2015 Bachelorscriptie Begeleiding: dr. S. R. Dahmen Korteweg-de Vries Instituut voor Wiskunde Faculteit der Natuurwetenschappen, Wiskunde en Informatica
Rationale punten op elliptische krommen Anne Barten 6 juli 2015 Bachelorscriptie Begeleiding: dr. S. R. Dahmen Korteweg-de Vries Instituut voor Wiskunde Faculteit der Natuurwetenschappen, Wiskunde en Informatica
Constructies met passer en liniaal, origami en meccano
 Constructies met passer en liniaal, origami en meccano Luuk Hoevenaars, Hogeschool Utrecht luuk.hoevenaars@hu.nl Hand- out voor de Nederlandse Wiskunde Dagen 201 De module in vogelvlucht De module gaat
Constructies met passer en liniaal, origami en meccano Luuk Hoevenaars, Hogeschool Utrecht luuk.hoevenaars@hu.nl Hand- out voor de Nederlandse Wiskunde Dagen 201 De module in vogelvlucht De module gaat
Examen Lineaire Algebra en Meetkunde Tweede zit (13:30-17:30)
") Examen Lineaire Algebra en Meetkunde Tweede zit 2016-2017 (13:30-17:30) 1 Deel gesloten boek (theorie) (5.5pt) - indienen voor 14u30 (0.5pt) Geef de kleinste kwadratenoplossing van het stelsel AX = d,
Examen Lineaire Algebra en Meetkunde Tweede zit 2016-2017 (13:30-17:30) 1 Deel gesloten boek (theorie) (5.5pt) - indienen voor 14u30 (0.5pt) Geef de kleinste kwadratenoplossing van het stelsel AX = d,
Classificatie van algebraïsche oppervlakken die invariant zijn onder S 3. door Ruben Meuwese
 Classificatie van algebraïsche oppervlakken die invariant zijn onder S 3. door Ruben Meuwese 1 Introductie van algebraïsche oppervlakken. Een algebraïsche oppervlak in R 3 wordt gegeven door een polynoom
Classificatie van algebraïsche oppervlakken die invariant zijn onder S 3. door Ruben Meuwese 1 Introductie van algebraïsche oppervlakken. Een algebraïsche oppervlak in R 3 wordt gegeven door een polynoom
Het planetaire tandwielstelsel
 Het planetaire tandwielstelsel Het doel van deze opdracht is om op een grafische manier de overbrengingsverhouding van een eenvoudig tandwielstelsel te bepalen. ===================================================================
Het planetaire tandwielstelsel Het doel van deze opdracht is om op een grafische manier de overbrengingsverhouding van een eenvoudig tandwielstelsel te bepalen. ===================================================================
Ter Leering ende Vermaeck
 Ter Leering ende Vermaeck 15 december 2011 1 Caleidoscoop 1. Geef een relatie op Z die niet reflexief of symmetrisch is, maar wel transitief. 2. Geef een relatie op Z die niet symmetrisch is, maar wel
Ter Leering ende Vermaeck 15 december 2011 1 Caleidoscoop 1. Geef een relatie op Z die niet reflexief of symmetrisch is, maar wel transitief. 2. Geef een relatie op Z die niet symmetrisch is, maar wel
Driehoeken. Enkele speciale topics. Arne Smeets. Trainingsweekend Februari 2008
 Driehoeken Enkele speciale topics Arne Smeets Trainingsweekend Februari 2008 Trilineaire en barycentrische coördinaten Definitie van trilineaire coördinaten Beschouw (in het vlak) een driehoek ABC en een
Driehoeken Enkele speciale topics Arne Smeets Trainingsweekend Februari 2008 Trilineaire en barycentrische coördinaten Definitie van trilineaire coördinaten Beschouw (in het vlak) een driehoek ABC en een
Examen HAVO en VHBO. Wiskunde B
 Wiskunde xamen HVO en VHO Hoger lgemeen Voortgezet Onderwijs Vooropleiding Hoger eroeps Onderwijs HVO Tijdvak 2 VHO Tijdvak 3 Woensdag 21 juni 13.30 16.30 uur 20 00 it examen bestaat uit 17 vragen. Voor
Wiskunde xamen HVO en VHO Hoger lgemeen Voortgezet Onderwijs Vooropleiding Hoger eroeps Onderwijs HVO Tijdvak 2 VHO Tijdvak 3 Woensdag 21 juni 13.30 16.30 uur 20 00 it examen bestaat uit 17 vragen. Voor
Wat is een robot? Artificiële Intelligentie 1. Robots. Soorten robots. Sensoren. Afstandsensoren. Beeldvorming. Hoofdstuk 25 uit Russell & Norvig
 Wat is een robot? Een robot is een fysisch systeem wat in staat is zijn waar te nemen en te manipuleren. Artificiële Intelligentie 1 Robots Hoofdstuk 25 uit Russell & Norvig Soorten robots Manipulators.
Wat is een robot? Een robot is een fysisch systeem wat in staat is zijn waar te nemen en te manipuleren. Artificiële Intelligentie 1 Robots Hoofdstuk 25 uit Russell & Norvig Soorten robots Manipulators.
Tentamen CT3109 CONSTRUCTIEMECHANICA april 2013, 09:00 12:00 uur
 Subfaculteit Civiele Techniek Vermeld op bladen van uw werk: Constructiemechanica STUDIENUMMER : NAAM : Tentamen CT3109 CONSTRUCTIEMECHANICA 4 15 april 013, 09:00 1:00 uur Dit tentamen bestaat uit 4 opgaven.
Subfaculteit Civiele Techniek Vermeld op bladen van uw werk: Constructiemechanica STUDIENUMMER : NAAM : Tentamen CT3109 CONSTRUCTIEMECHANICA 4 15 april 013, 09:00 1:00 uur Dit tentamen bestaat uit 4 opgaven.
1.1 Definities en benamingen 9 Oefeningen Cirkel door drie punten 13 Oefeningen 14
 INHOUD 1 De cirkel 9 1.1 Definities en benamingen 9 Oefeningen 11 1.2 Cirkel door drie punten 13 Oefeningen 14 1.3 Onderlinge ligging van een rechte en een cirkel 20 1.3.1 Aantal snijpunten van een rechte
INHOUD 1 De cirkel 9 1.1 Definities en benamingen 9 Oefeningen 11 1.2 Cirkel door drie punten 13 Oefeningen 14 1.3 Onderlinge ligging van een rechte en een cirkel 20 1.3.1 Aantal snijpunten van een rechte
Dag van GeoGebra Probleemoplossende vaardigheden en onderzoekscompetentie wiskunde 28 mei 2011 Gent
 1 VERBORGEN FIGUREN 1.1 OPGAVE In heel wat klassieke opdrachten uit de meetkunde is het de bedoeling om een bepaalde figuur te tekenen indien een aantal punten gegeven zijn. De eigenschappen van deze figuur
1 VERBORGEN FIGUREN 1.1 OPGAVE In heel wat klassieke opdrachten uit de meetkunde is het de bedoeling om een bepaalde figuur te tekenen indien een aantal punten gegeven zijn. De eigenschappen van deze figuur
Tentamen io1031 Product in werking (vragen) vrijdag 26 augustus 2011; 14:00 17:00 uur
 vrijdag 26 augustus 2011; 14:00 17:00 uur") Tentamen io1031 Product in werking (vragen) vrijdag 26 augustus 2011; 14:00 17:00 uur Mededelingen Dit tentamen bestaat uit 4 bladzijden. De LAATSTE zes vragen (samen maximaal 5 punten) zijn zogenaamde
Tentamen io1031 Product in werking (vragen) vrijdag 26 augustus 2011; 14:00 17:00 uur Mededelingen Dit tentamen bestaat uit 4 bladzijden. De LAATSTE zes vragen (samen maximaal 5 punten) zijn zogenaamde
VAKWERKEN. Hans Welleman 1
 VAKWERKEN Hans Welleman 1 WAT IS EEN VAKWERK vormvaste constructie opgebouwd uit alleen pendelstaven Hans Welleman 2 STAAFAANDUIDINGEN Randstaven Bovenrand Onderrand dd sd Wandstaven Verticalen Diagonalen
VAKWERKEN Hans Welleman 1 WAT IS EEN VAKWERK vormvaste constructie opgebouwd uit alleen pendelstaven Hans Welleman 2 STAAFAANDUIDINGEN Randstaven Bovenrand Onderrand dd sd Wandstaven Verticalen Diagonalen
wiskunde B vwo 2016-I
 wiskunde vwo 06-I Formules Vlakke meetkunde Verwijzingen naar definities en stellingen die bij een bewijs mogen worden gebruikt zonder nadere toelichting. Hoeken, lijnen en afstanden: gestrekte hoek, rechte
wiskunde vwo 06-I Formules Vlakke meetkunde Verwijzingen naar definities en stellingen die bij een bewijs mogen worden gebruikt zonder nadere toelichting. Hoeken, lijnen en afstanden: gestrekte hoek, rechte
Matrices en Grafen (wi1110ee)
") Matrices en Grafen (wi1110ee) Electrical Engineering TUDelft September 1, 2010 September 1, 2010 Inleiding Mekelweg 4, kamer 4.240 tel : (015 27)86408 e-mail : I.A.M.Goddijn@TUDelft.nl homepage : http:
Matrices en Grafen (wi1110ee) Electrical Engineering TUDelft September 1, 2010 September 1, 2010 Inleiding Mekelweg 4, kamer 4.240 tel : (015 27)86408 e-mail : I.A.M.Goddijn@TUDelft.nl homepage : http:
Algemene relativiteitstheorie
 Algemene relativiteitstheorie HOVO cursus Jo van den Brand Les 1: 5 november 015 Copyright (C) Vrije Universiteit 015 Overzicht Docent informatie Jo van den Brand, Gideon Koekoek Email: jo@nikhef.nl, gkoekoek@gmail.com
Algemene relativiteitstheorie HOVO cursus Jo van den Brand Les 1: 5 november 015 Copyright (C) Vrije Universiteit 015 Overzicht Docent informatie Jo van den Brand, Gideon Koekoek Email: jo@nikhef.nl, gkoekoek@gmail.com
OEFENTOETS VWO B DEEL 3
 OEFENTOETS VWO B DEEL 3 HOOFDSTUK 0 MEETKUNDE MET VECTOREN OPGAVE Gegeven zijn de vectoren a, b en c die vanuit O de hoekpunten van driehoek ABC aanwijzen. Het punt P is het midden van AB, het punt Q is
OEFENTOETS VWO B DEEL 3 HOOFDSTUK 0 MEETKUNDE MET VECTOREN OPGAVE Gegeven zijn de vectoren a, b en c die vanuit O de hoekpunten van driehoek ABC aanwijzen. Het punt P is het midden van AB, het punt Q is
Polygonen met Constante Torsie. Algemeen Wiskunde Colloquium 23 juni 2009, TU/e
 Polygonen met Constante Torsie Algemeen Wiskunde Colloquium 23 juni 2009, TU/e Tom Verhoeff Technische Universiteit Eindhoven Faculteit Wiskunde & Informatica c 2009, T. Verhoeff @ TUE.NL 1/20 Polygonen
Polygonen met Constante Torsie Algemeen Wiskunde Colloquium 23 juni 2009, TU/e Tom Verhoeff Technische Universiteit Eindhoven Faculteit Wiskunde & Informatica c 2009, T. Verhoeff @ TUE.NL 1/20 Polygonen
INLEIDING. KINEMATICA: bewegingsleer MECHANICA. DYNAMICA: krachtenleer
 MECHANICA INLEIDING INLEIDING MECHANICA KINEMATICA: bewegingsleer DYNAMICA: krachtenleer KINEMATICA RUST EN BEWEGING rust of beweging? RUST EN BEWEGING RUST EN BEWEGING RUST EN BEWEGING RUST EN BEWEGING
MECHANICA INLEIDING INLEIDING MECHANICA KINEMATICA: bewegingsleer DYNAMICA: krachtenleer KINEMATICA RUST EN BEWEGING rust of beweging? RUST EN BEWEGING RUST EN BEWEGING RUST EN BEWEGING RUST EN BEWEGING
16.0 Voorkennis. Voorbeeld 1: Los op in 2x + 3i = 5x + 6i -3x = 3i x = -i
 16.0 Voorkennis Voorbeeld 1: Los op in 2x + 3i = 5x + 6i -3x = 3i x = -i Voorbeeld 2: Los op in 4x 2 + 12x + 15 = 0 4x 2 + 12x + 9 + 6 = 0 (2x + 3) 2 + 6 = 0 (2x + 3) 2 = -6 (2x + 3) 2 = 6i 2 2x + 3 =
16.0 Voorkennis Voorbeeld 1: Los op in 2x + 3i = 5x + 6i -3x = 3i x = -i Voorbeeld 2: Los op in 4x 2 + 12x + 15 = 0 4x 2 + 12x + 9 + 6 = 0 (2x + 3) 2 + 6 = 0 (2x + 3) 2 = -6 (2x + 3) 2 = 6i 2 2x + 3 =
Statica(WB/MT) college 4 Moment, uitprodukt. Guido Janssen
 college 4 Moment, uitprodukt. Guido Janssen") Statica(WB/MT) college 4 Moment, uitprodukt Guido Janssen G.c.a.m.janssen@tudelft.nl Toets 3, vraag 9 Toets 3 vraag 9 F AC max =1500N F AB max =1250N + å F = 0 x + åf y = 0 æ 3 F AB cos45 - F AC ç ö è
Statica(WB/MT) college 4 Moment, uitprodukt Guido Janssen G.c.a.m.janssen@tudelft.nl Toets 3, vraag 9 Toets 3 vraag 9 F AC max =1500N F AB max =1250N + å F = 0 x + åf y = 0 æ 3 F AB cos45 - F AC ç ö è