Quadcopter profielwerkstuk Verslag
|
|
|
- Frans van der Meer
- 8 jaren geleden
- Aantal bezoeken:
Transcriptie

1 Quadcopter profielwerkstuk Verslag

2 Voorwoord Wij zijn Emiel Zijlma en Krijn Schouten, we zitten beiden op het VWO en hebben dit profielwerkstuk gemaakt voor het vak Informatica. Dit is voor ons allebei het tweede PWS in onze schoolcarrière hier op de RSG. Mede door deze eerdere ervaringen hebben wij besloten om samen te werken. We wisten allebei van tevoren dat het onderwerp iets te maken moest hebben met onze eerdere profielwerkstukken. Het vorige PWS van Emiel ging over artificial intelligence en het vorige PWS van Krijn ging over aerodynamica. Al na één middag kwamen wij op het idee om voor ons profielwerkstuk onze eigen quadcopter te ontwikkelen. Tijdens het drinken van een colaatje kwamen wij tot het idee van een vliegend bijzettafeltje. Al snel vormde dit zich tot een quadcopter. Het is de bedoeling om zoveel mogelijk van deze quadcopter zelf te maken, een kant en klare quadcopter kopen doen we dus niet. Ook willen we zoveel mogelijk van de software zelf ontwikkelen. Dat betekent dat we naast informatica ons ook bezig gaan houden met de natuurkunde en wiskunde achter onze quadcopter. Wij hopen dat we na dit PWS meer begrijpen over de hard- en software van een quadcopter en wat er eigenlijk allemaal bij komt kijken als je je eigen vliegmachine gaat ontwikkelen. We danken onze sponsors Altis, Tenderservice en TiePie engineering voor hun bijdrage aan dit PWS. Verder willen wij graag de volgende personen bedanken voor hun bijdrage: Mr. Groenewold Mr. Huitema Mr. Lemstra en Mr. van Zandbergen Mr. Pijnenborg en Mr. Meindertsma Mr. van den Oever Informatica Natuurkunde Wiskunde Scheikunde Nederlands 2

3 Inhoudsopgave Verslag Pagina 1. Inleiding 5. a. Wat is een quadcopter? 6. b. Toepassingen 7. c. Welke soorten multicopters zijn er? Werkplan Afstandsbediening 11. a. Schematic 11. b. Board 12. c. Foto 13. d. Uitleg componenten 13. e. Uitleg software 14. f. Software Flight Control Board 17. a. Introductie 17. b. Schematic 18. c. Board 19. d. Foto s 20. e. Uitleg componenten 21. f. Verbeteringen hardware 22. g. Uitleg/theorie software Stabiliseren PID-regelaar Filteren 26. h. Uitleg software 26. i. Software Afsluiting Bronnen Logboeken 33. a. Logboek Emiel Zijlma 33. b. Logboek Krijn Schouten 35. 3

4 Bijlage Pagina 1. Materialen 3. a. Frame 3. b. Motoren 4. c. ESCs 5. d. Propellors 6. e. Batterij 7. f. Oplader 8. g. XBee I 2 C-bus (TWI Two Wire serial Interface) U(S)ART (universal synchronous/asynchronous receiver transmitter) Versnellingsopnemer Gyroscoop Luchtdruksensor (barometer) Lichtbak Print ontwikkelen 25. a. Het tekenen van de print in Eagle 25. b. Theorie print ontwikkelen 27. c. Kalibratie 29. d. Solderen XBee adapter 31. a. Beschrijving 31. b. Schematic 31. c. Board 32. d. Foto s Level converter print 33. a. Beschrijving 33. b. Schematic 34. c. Board 34. d. Foto Motor control print 35. a. Schematic 35. b. Board 36. c. Foto s 37. d. Uitleg componenten 38. e. Uitleg software 39. f. Software 41. g. Meting ter controle 42. Cd-rom: De cd-rom bevat de datasheets die we geraadpleegd hebben gedurende dit project. Ook bevat deze cd-rom een digitale versie van het verslag en enkele foto s die we wegens ruimte gebrek uit het verslag hebben gelaten. Ook de Ealge bestanden van de printplaten en de Solidworks bestanden van de lichtbak zijn hierin inbegrepen (er is speciale software nodig om deze programma s te bekijken, deze software is wegens auteursrechten schending niet meegeleverd). 4

5 1. Inleiding Het idee van ons PWS is om stap voor stap onze eigen quadcopter te gaan ontwikkelen. Dit is een erg tijdrovende opgave. We verwachten dan ook niet dat onze quadcopter optimaal vliegt tegen de tijd van onze PWS-presentatie. Ons doel van dit project is om zelf een quadcopter te bouwen. En daarmee zowel de hard- als software volledig zelf te ontwikkelen, zodat we alles van deze quadcopter begrijpen. Vliegen is dus eigenlijk een beetje bijzaak. Wij zijn dan ook niet van plan om na dit PWS te stoppen met dit project. We willen blijven doorgaan met het ontwikkelen van deze quadcopter totdat het mogelijk is dat wij hem op afstand kunnen aansturen door middel van een afstandsbediening of computer terwijl hij zichzelf constant controleert en zo nodig stabiliseert. Het liefst willen wij hem uitrusten met een GPS-ontvanger en een foto/video camera. Maar dit heeft op dit moment nog geen prioriteit. We willen deze quadcopter maken zonder al te veel invloeden van buitenaf. Zo willen wij de printplaten voor de quadcopter-besturing ook het liefst helemaal zelf maken. Daarmee bedoelen we het tekenen, ontwerpen, etsen en solderen. Wij moeten dus ook onze eigen etstank en lichtbak ontwerpen en maken. Ook de software willen wij helemaal zelf stap voor stap ontwikkelen, zowel de theorie achter de software als het schrijven van de software in de programmeertaal C. 5


6 Wat is een quadcopter? Een quadcopter (quadrotor, quadrocopter) is een multicopter met vier rotors. In tegenstelling tot een gewone helikopter, kan een quadcopter zich op meerdere manieren bewegen. Dit kan gedaan worden door de hoek van de rotorbladen te wijzigen, zoals ook bij een gewone helikopter kan. Maar ook door de snelheid van de rotors op dezelfde as te variëren. Hoewel de quadcopter pas enkele jaren echt bekend is geworden bij het grote publiek dateert het concept van de quadcopter al van het begin van de 20 ste eeuw. En de quadcopters behoren dan ook tot de eerste succesvolle VTOL (Vertical Take Off and Landing) vliegmachines. De eerste modellen hadden alleen wel veel problemen met de stabilisatie en vaak een veel te beperkte besturing. Vanwege de draaiing van de rotor ondervindt een helikopter een koppel dat gecompenseerd moet worden om te voorkomen dat de helikopter ongecontroleerd gaat ronddraaien (spinnen). Deze kracht word bij een helikopter opgeheven door middel van een staartrotor of een tweede hoofdrotor die in een tegengestelde richting draait. Kamov KA-50 Black Shark met twee contraroterende hoofdrotors De staartrotor van een Sikorsky MH-53 Bij een quadcopter kan dit probleem makkelijker opgelost worden. Omdat een quadcopter namelijk 4 rotors heeft kan de kracht worden opgeheven door twee van de motoren in tegengestelde richting te laten draaien. Hierbij is het altijd zo dat de motoren op dezelfde assen dezelfde kanten op draaien. Verder maken we in de quadcopterwereld onderscheid tussen twee types quadcopter. Namelijk de +4 en de x4. Het verschil tussen deze twee is de oriëntatie van de motoren van de quadcopter ten opzichte van de voorkant. Hieronder een plaatje van een +4 en een x4 quadcopter. 6
 vliegmachines.")
7 Toepassingen Dankzij de lage productiekosten is de quadcopter een gewild stukje technologie. Quadcopters worden al enige tijd toegepast in de luchtfotografie. Maar het leger en de politie tonen ook al serieuze interesse in deze UAV (Unmanned aerial vehicle). Enkele voorbeelden voor toepassingen van quadcopters zijn: - Verkenning/Ordehandhaving Denk hierbij aan een kleine opvouwbare quadcopter die in een oorlogssituatie ingezet kan worden om een omgeving te verkennen of een oorlogssituatie in te schatten. De vliegtuigfabrikant Lockheed Martin is al bezig met de ontwikkeling van zo n onbemande VTOL. De Japanse politie is ook momenteel al bezig met het onderzoeken van het gebruik van quadcopters voor onder andere ordehandhaving. - Inspectie industriële installaties Bij industriële installaties is controle vaak cruciaal. Een inspectie vanuit de lucht is alleen vaak erg duur. Quadcopters kunnen hier een oplossing voor bieden, als ze worden uitgerust met camera s voor live video. Ook zouden qaudcopters toegepast kunnen worden bij een situatie als die in Fukushima. Quadcopters kunnen dankzij hun design makkelijk uitgerust worden met apparatuur om bijvoorbeeld straling waar te nemen. Ook kunnen ze vanwege hun wendbaarheid en grootte gemakkelijk op moeilijk bereikbare plekken komen. - Luchtfoto s van onroerend goed Veel goedkoper en sneller dan het huren van een bemande helikopter met fotograaf. - Filmindustrie Door gebruikt te maken van quadcopters met videocamera s worden dure, lompe en grote bemande helikopters overbodig. Maar vergis je niet in de kwaliteit! Er zijn momenteel al multicopters met 4K camera s aan boord. 7

8 Welke soorten multicopters zijn er? Hierboven stond al kort uitgelegd dat er verschillende soorten multicopters zijn. Hier gaan wij wat dieper in op de verschillende typen en hun voor- en nadelen. De Bicopter De bicopter is een multicopter die gebruik maakt van maar twee rotors. Deze multicopter heeft geen last van de koppelkrachten omdat de twee motoren ieder een andere kant op draaien en elkaar dus opheffen. Het is dus niet nodig een staartrotor te hebben zoals bij een helikopter. Beide motoren kunnen onafhankelijk gekanteld worden door middel van elektrische servo s. Dit is nodig om de bicopter te manoeuvreren. Servo s zijn elektromotoren die in dit geval de hoek van de rotors ten opzichte van het frame kunnen veranderen. De Tricopter De tricopter maakt gebruik van 3 motoren en is veruit het meest instabiel. Een groot nadeel is dat een tricopter gebruik maakt van een servo gestuurde 3 e motor. Dit maakt de tricopter mechanisch erg ingewikkeld. De servo is nodig om de derde motor te kantelen. Omdat de krachten er anders voor zorgen dat de tricopter rond zijn as gaat spinnen. De tricopter is dan ook een van de minst populaire multicopters. De quadcopter De quadcopter is een van de meest gebruikte modellen. En met zijn 4 motoren mechanisch ook een van de makkelijkste. Vanwege het even aantal motoren worden tijdens het vliegen de krachten van de draaiende rotors opgeheven en ook de besturing kan compleet geregeld worden zonder de hulp van servo s. Ook geeft de vorm van het frame veel stabiliteit. Dit, samen met de grote draagkracht geeft de quadcopter veel voordelen boven de eerder genoemde modellen. Maar nu we langzamerhand steeds meer motoren gaan gebruiken komt er wel een probleem aan de orde namelijk de accu. Een populaire quadcopter van Parrot, de AR drone 2.0 heeft namelijk door al die motoren maar een vliegtijd van 12 minuten. En het militaire prototype van Lockheed Martin kan volgens de berichten slechts 40 minuten operationeel blijven. Hexacopter en Octacopter Dit probleem wordt alleen maar groter bij de hexa- en octacopters. Meer motoren dus meer draagkracht en stabiliteit, maar ook een groter accu pakket, dus een stuk zwaarder. Ook zijn de kosten van hexa- en octacopters niet mals. Zo ben je makkelijk 230 euro verder aan alleen al de motoren met ESC s (Electronic Speed Controller) quadcopter onderdelen worden uitgebreid behandeld in de bijlage op pagina 3 t/m 9). Ook wordt naarmate je je met meer motoren gaat werken de besturing steeds ingewikkelder. 8


9 2. Werkplan Ons doel is om zelf een quadcopter te bouwen en ieder onderdeel zo mogelijk zelf te maken. We willen bijvoorbeeld zelf de printplaten maken. Zelf de draadloze communicatie begrijpen en de software schrijven die de quadcopter aanstuurt. Hieronder staan de stappen die wij hebben doorlopen om te komen tot dit resultaat. 1. Nadat ons onderwerp vast stond hebben we onderzoek gedaan naar de haalbaarheid van dit project. Na andere quadcopter projecten bestudeerd te hebben kwamen wij tot de conclusie dat het mogelijk was om zelf een quadcopter te ontwikkelen. Al wordt dit wel erg moeilijk dit te voltooien binnen het tijdsbestek van het profielwerkstuk omdat het een enorm complex onderwerp is. 2. We hebben gekeken naar de materialen die nodig zijn om een quadcopter te kunnen bouwen. Zo is in deze fase de door ons gebruikte microcontroller vastgesteld. 3. Verdiepen in microcontrollers met name de timers om de motoren aan te sturen. 4. Ets spullen uitzoeken en verder verdiepen in de etskunst. Zo hebben we gekeken naar de verschillende materialen en methoden. 5. Leren werken met U(S)ART voor verschillende data o.a. sensor waarden te versturen naar de pc. De U(S)ART is later ook gebruikt voor de draadloze noodstop. 6. Naar Leeuwarden voor I 2 C presentatie. 7. Het eerste sensorboard ontwerpen voor de versnellingsopnemer, gyroscoop en luchtdruk sensor. Deze print is verder niet uit gewerkt omdat wij later tot de conclusie kwam dat het niet handig was om gebruik te maken van een losse sensor print. Het sensorprintje 8. In het programma gebruiken wij veel interrupts omdat er veel time kritieke zaken moeten gebeuren. In deze fase hebben wij ons verdiept in de verschillende types interrupts. 9. De lichtbak maken voor het ontwikkelen van onze eerste print, zie de lichtbak in de bijlage pagina Gezien de veiligheid is het ook belangrijk een noodstop te hebben. Hiervoor hebben wij een systeem uitgedacht zodat wij hem op afstand kunnen uitschakelen, zie afstandsbediening op pagina Onderdelen bestellen voor de verschillende printen van de deelprojecten. 12. Sponsors zoeken voor een bijdrage. 13. Het maken van de XBee adapter, de eerste echt functionele print die wij gemaakt hebben, zie XBee adapter in de bijlage op pagina Na de XBee adapter zijn we begonnen met het ontwerpen en maken van het motor control board. Dit was een ander deel project om te leren hoe de motoren aangestuurd moesten worden, ook dient deze print als kalibratie hulp voor de ESCs. Zie motor control board in de bijlage op pagina 35. 9

10 15. Het assembleren van de tot nu toe ontvangen componenten: frame, motoren, ESCs. 16. Het ontwerpen en fabriceren van de afstandsbediening, zie pagina Het ontwerpen en fabriceren van de levelcoverter print, zie levercoverter print in de bijlage op pagina Het verder uitdenken van de software o.a. het uitlezen van de digitale sensordata, verschillende vormen van filteren (kalman, complementary), het stabiliseren en hoogte behoud doormiddel van PID-regelaars. 19. Het ontwikkelen en maken van het flight control board, zie pagina 17. Deze print bevat de kennis van de vorige deelprojecten. 20. Het maken van het verslag. 10

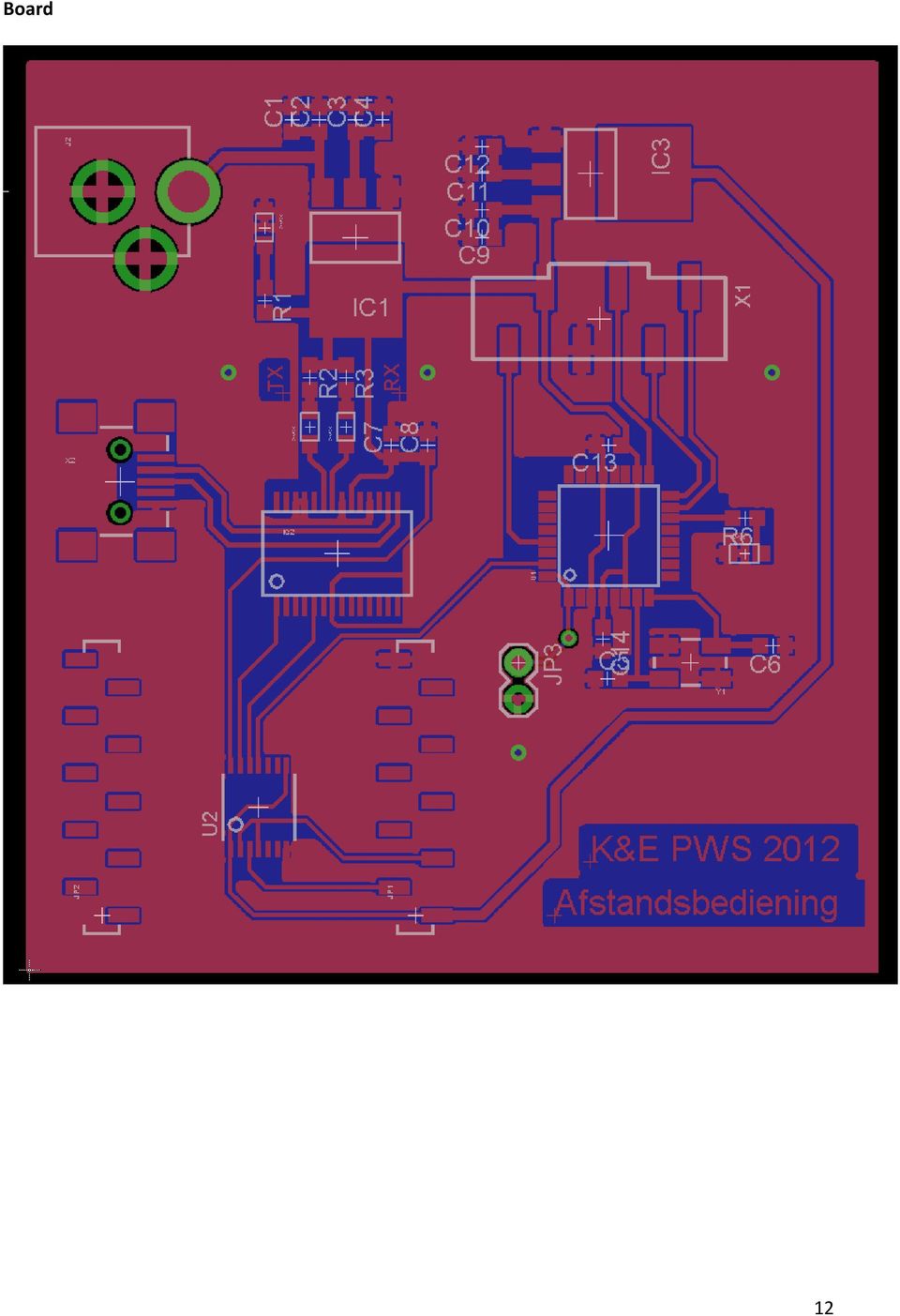
11 3. Afstandsbediening Schematic: 11

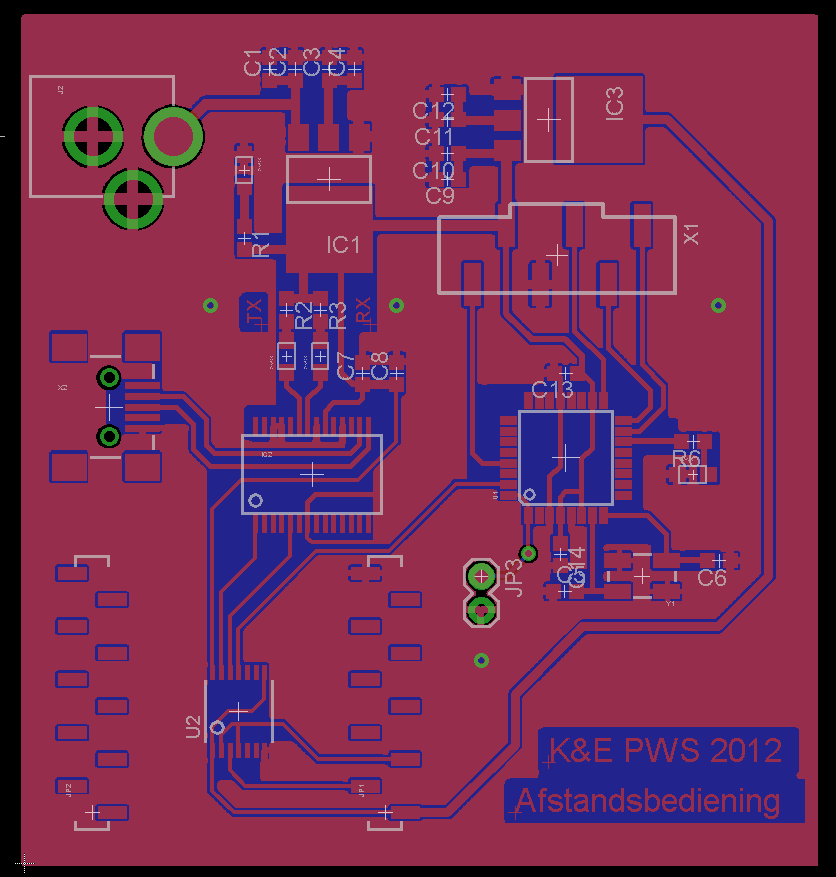
12 Board 12
13 Foto De afstandsbediening na assemblage Uitleg componenten In dit stuk geven wij korte uitleg over de hoofdcomponenten gebruikt bij de afstandsbediening. NX1117 (IC1 en IC3): deze ICs zorgen voor een stabiele voedingslijn. IC1 voor 5V en IC3 voor 3.3V. XBee: dit is een module die draadloos met een andere XBee kan communiceren. 2x 10-pin; 2 mm SMD (Surface-Mounted Device) header (JP1 en JP2): Onze XBee past op deze headers, zo kunnen wij de XBee er makkelijk uithalen zodat we hem kunnen vervangen of de configuratie kunnen aanpassen. ATmega168 (U1): dit is de microcontroller. Op de interrupt pin is een schakelaar aangesloten (de noodstop). Wanneer de schakelaar om wordt gezet, treedt er een interrupt op en wordt er een ISR (interrupt service routine) uitgevoerd. In deze ISR wordt een noodstopsignaal over de UART via de XBee naar de XBee op de quadcopter verstuurd. 6-pin; 2,54 mm header (C-GRID ): via deze header zijn de ISP (in system programming) pinnen van de microcontroller beschikbaar. Hier kunnen wij makkelijk onze programmer op aansluiten om de software op de microcontroller aan te passen. 13
: dit is de microcontroller. Op de interrupt pin is een schakelaar aangesloten (de noodstop).")
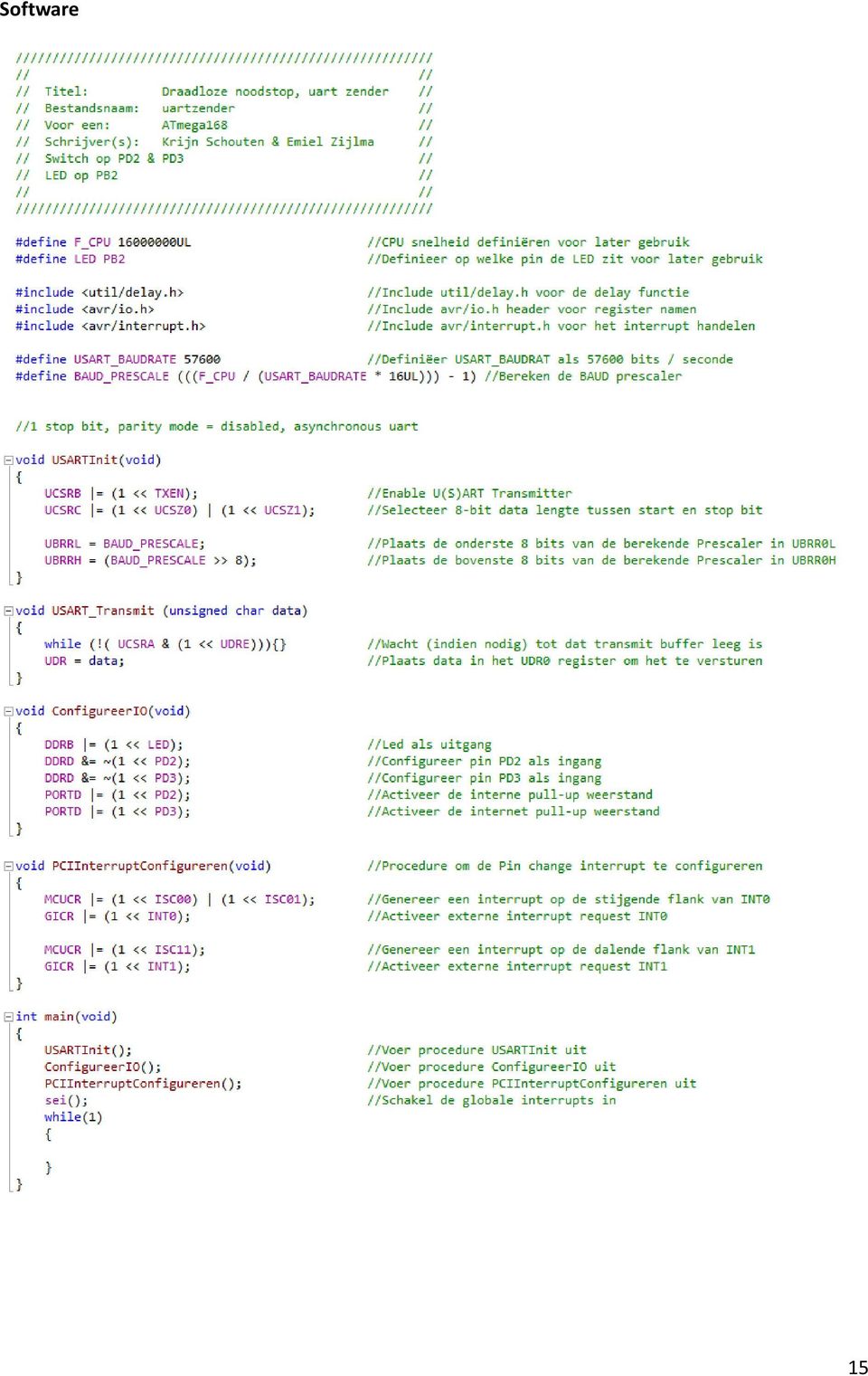
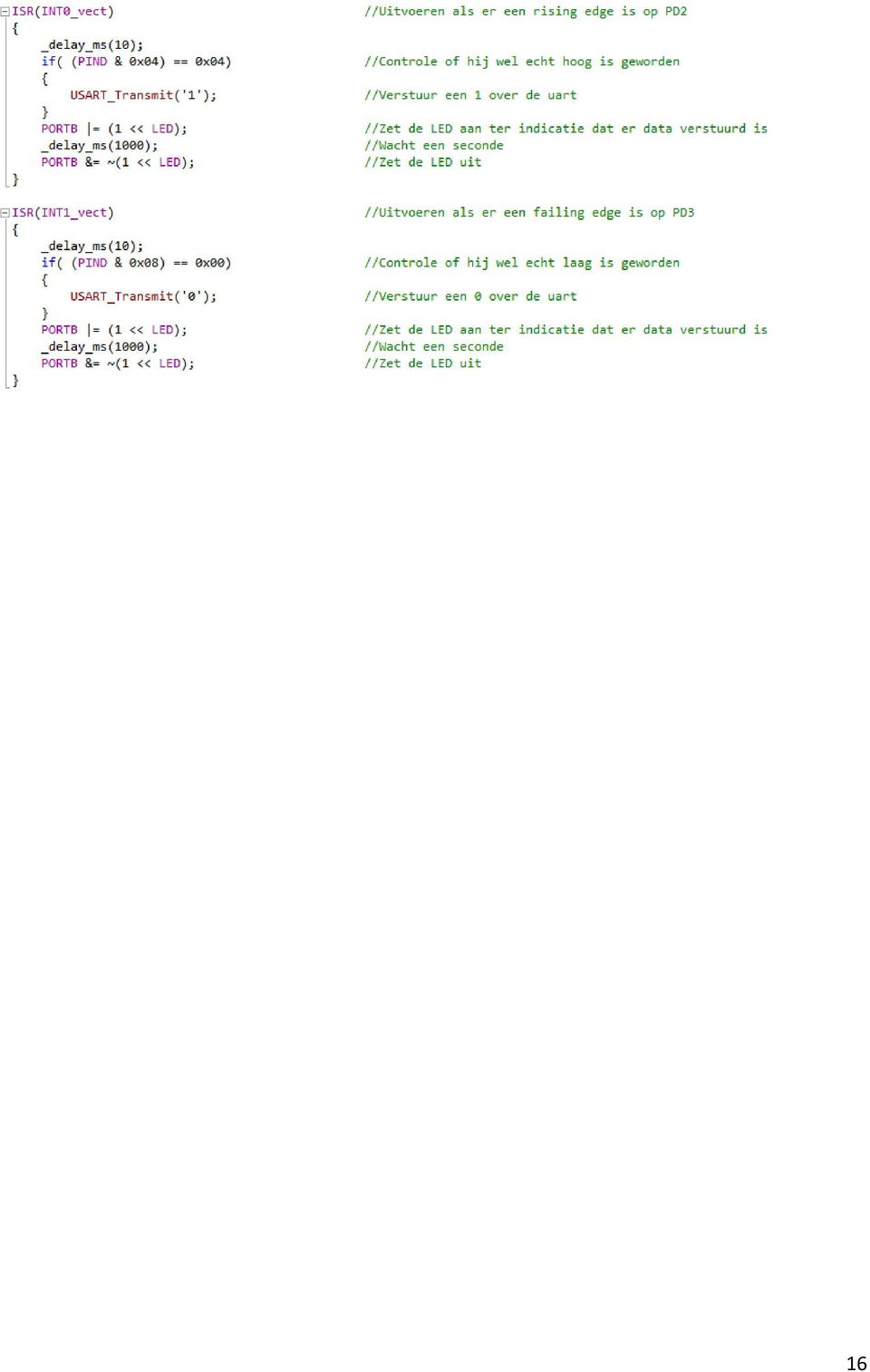
14 TXB0104 (U2): dit is een level converter. Deze zorgt ervoor dat de XBee, FTDI en de microcontroller met elkaar kunnen communiceren. Dit is nodig omdat de componenten op een verschillende spanning werken. FT232RLSSOP (IC2): dit is een IC van FTDI (Future Technology Devices International). Deze zet de binnengekomen data van de quadcopter over de UART om in een USB signaal en visa versa. USB (X2): via deze USB poort kunnen wij communiceren met onze microcontroller. Ook kunnen wij via deze USB data van de quadcopter draadloos ontvangen en commando s draadloos naar de quadcopter versturen. Dit is bijvoorbeeld handig bij het tunen van de PID-regelaars. Missile Switch Red: deze schakelaar gebruiken we om de quadcopter in te schakelen en een noodstop uit te voeren. Ook zijn er 4 LEDs aanwezig om de volgende zaken te kunnen controleren: - voeding - data overdracht over Rx - data overdracht over Tx - noodstop in uitvoering Uitleg software In de software wordt de U(S)ART peripheral geconfigureerd. Ook is er een functie om over de U(S)ART data te versturen (de noodstop). Vervolgens worden de pinnen geconfigureerd, led als uitgang en de pinnen waar de schakelaar aan zit als ingang. Ook worden de interne pull-up weerstanden geactiveerd. Dan geven we aan dat er een ISR uitgevoerd moet worden als er een rising of een falling edge optreedt. Als alles is ingesteld gebeurt er verder eerst niks, we hebben het namelijk zo kunnen programmeren dat onze while(1) loop helemaal leeg is! Maar wanneer er een interrupt optreedt worden de bijbehorende ISR uitgevoerd en de bij behorende data verzonden: noodstop of vliegklaar. 14

15 Software 15
16 16
17 4. Flight Control Board Introductie Het Flight Control Board wordt bevestigd op de quadcopter en verzorgt onder andere de stabilisatie; hoogte regeling; communicatie en de motor aansturing. Ook deze print hebben wij zelf compleet ontwikkeld. Dit bracht een grote uitdaging met zich mee omdat de afmetingen tussen sommige pads maar 0,14mm waren. Wij vroegen dus het uiterste van onze eigen print ontwikkel omgeving. We hebben dus veel moeten optimaliseren om tot dit resultaat te kunnen komen. Onder andere het optimaliseren van de belichtings- en ontwikkeltijd en de ets temperatuur. Ook hebben we andere sheets aan moeten schaffen (kalksheets) voor een betere afdruk. Deze print is ook beter beschermd tegen oxidatie dan onze ander printen omdat wij hem hebben verzilverd met HG Verzilverpolish. Door te verzilveren bescherm je de print niet alleen beter tegen oxidatie maar worden de spoortjes ook hoger en dikker waardoor de weerstand verlaagd word. Dit heeft een positief effect op de prestaties van de print en geeft ook nog eens een professionele uitstraling. Het Flight Control Board bevat verschillende sensoren die bepaalde vluchtdata meet. Deze data wordt door middel van complexe berekeningen gecombineerd en functioneert als input voor het regelsysteem. Deze complexe berekeningen worden uitgevoerd door de ATmega2560 waar het Flight Control Board mee is uitgerust. Dit is een luxere microcontroller dan dat gebruikt is op de afstandsbediening. Hij heeft naast zijn grotere geheugen ook meer timers; U(S)ARTs; I 2 C-bussen en I/O s. 17
 voor een betere afdruk.")
18 Schematic 18


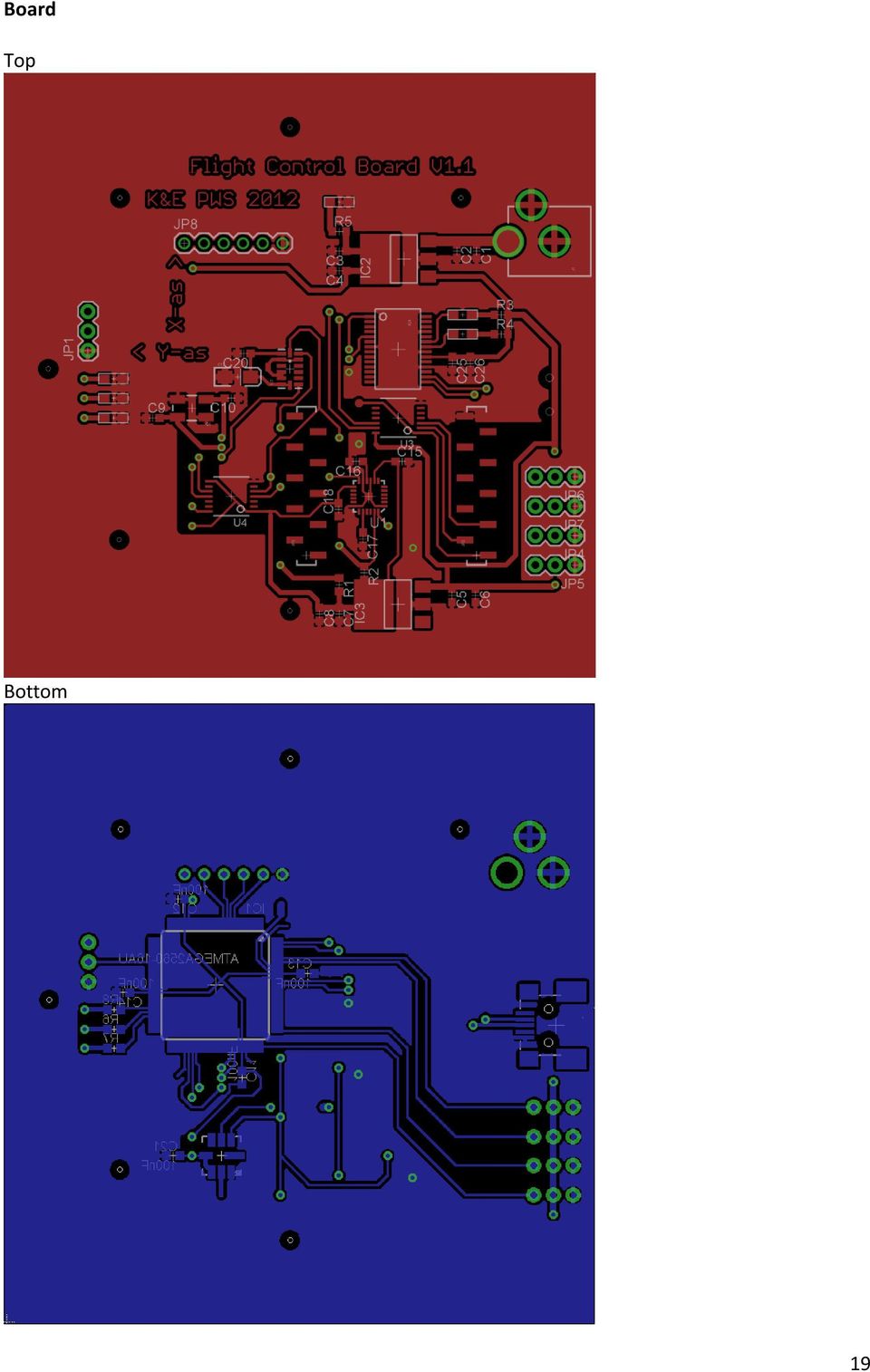
19 Board Top Bottom 19
20 Foto s 20

21 Uitleg componenten In dit stuk geven wij korte uitleg over de hoofdcomponenten gebruikt voor het Flight Control Board. NX1117 (IC1 en IC3): deze ICs zorgen voor een stabiele voedingslijn. IC2 voor 5V en IC3 voor 3.3V. XBee: dit is een module die draadloos met een andere XBee kan communiceren. 2x 10-pin; 2 mm SMD header (JP1 en JP2): in deze twee headers past onze XBee, zo kunnen wij de XBee er makkelijk uithalen zodat we hem kunnen vervangen of de configuratie kunnen aanpassen. 6-pin; 2,54 mm header (JP8): via deze header zijn de JTAG pinnen van de microcontroller beschikbaar. Hier kunnen wij makkelijk onze programmer op aansluiten om de software op de microcontroller aan te passen. 3-pin 2,54 mm header (JP1): op deze header kan je door middel van de positie van de jumper aangeven of je wel of niet de ESC wilt kalibreren. 4x 3-pin 2,54 mm header (JP4 t/m JP7): op deze headers worden de ESC aangesloten. TXB0104 (U3): dit is een level converter. Deze zorgt ervoor dat de XBee, FTDI en de microcontroller met elkaar kunnen communiceren. Dit is nodig omdat de componenten op een verschillende spanning werken. TXS0104 (U4): dit is een level converter. Deze zorgt ervoor dat de sensoren en de microcontroller met elkaar kunnen communiceren. Dit is nodig omdat de componenten op een verschillende spanning werken. We hebben hiervoor geen TXB0104 gebruikt omdat deze de capaciteit van de I 2 C data-bus niet aan kon. Pull-up weerstanden (R1, R2): deze pull-up weerstanden zorgen ervoor dat de I 2 C datalijnen SDA en SCL in rust hoog zijn. FT232RLSSOP (IC4): dit is een IC van FTDI (Future Technology Devices International). En zet ons binnengekomen data van de quadcopter over de UART om in een USB signaal en visa versa. USB (CN1): via deze USB poort kunnen wij communiceren met onze microcontroller. Ook kunnen wij via deze USB data van de quadcopter draadloos ontvangen en commando s draadloos naar de quadcopter versturen. Dit is bijvoorbeeld handig bij het tunen van de PID-regelaars. ADXL345 (U2): versnellingsopnemer. Zie voor meer informatie over de versnellingsopnemer de bijlage pagina 18. ITG-3200 (U1): gyroscoop. Zie voor meer informatie over de gyroscoop de bijlage pagina 20. BMP085 (U$15): luchtdruksensor. Zie voor meer informatie over de luchtdruksensor de bijlage pagina 21. ATmega2560 (IC1): dit is de microcontroller. Zie voor meer informatie over de microcontroller de datasheet op de cd-rom. 21
22 Ook zijn er 6 LEDs aanwezig om de volgende zaken te kunnen controleren: - voeding - data overdracht over Rx - data overdracht over Tx - noodstop - kalibratie - debuggen Verbeteringen Hardware Zoals bij de meeste projecten worden er hier ook fouten gemaakt. Hieronder is een korte opsomming te vinden van de fouten en gebreken van ons Flight Control Board. Het liefst zouden wij deze print nogmaals overdoen om deze fouten eruit te halen. Maar dit kost ons teveel tijd die wij nu eigenlijk niet hebben. Ook hebben wij nog steeds geen garantie dat onze ATMEGA2560 snel genoeg is om de vele en complexe calculaties uit te voeren. En als blijkt dat de microcontroller vervangen moet worden, gooien we automatisch het hele huidige ontwerp van het board weg. De meeste cruciale fouten hebben wij natuurlijk wel verholpen. Al zijn deze oplossingen cosmetisch en soms elektrisch niet optimaal. Hier een opsomming van de door ons ontdekte fouten en problemen: - Test pin FTDI op GND aansluiten (opgelost) - Andere footprint voor de voeding, GND pad links, 3.3V/5.0V uitgang middelste pad, ingang rechter pad (opgelost) - Andere header voor JTAG programmeer connector, voor makkelijkere aansluiting met de programmer, conform de JTAG pinout - Pull-up weerstanden op de 5V I 2 C lijnen. Niet alleen op de 3.3 I 2 C lijnen (opgelost) - Andere levelconterter voor I 2 C SDA en SCL lijnen, de TXS0104 (opgelost) - 5V spoortje voor de ESC op de bovenkant weghalen, is overbodig/dubbel - FTDI op de onderkant voor optimaal ruimtegebruik - TXS0104 op onderkant, vier onnodige via s minder - Andere grotere pads 100nF/10µF bij de NX1117, past beter - Pads versnellingsopnemer groter maken, betere fit, makkelijker solderen - I 2 C lijnen outbreaken, meetpunten maken zodat we makkelijk kunnen zien wat er op SDA/SCL lijnen gebeurt - I/O pinnen outbreaken, voor eventuele nieuwe sensoren - Aanduidingen bij de LED s duidelijkere interface - ESC calibration header weghalen, de kalibratie van de ESC draadloos via de afstandsbedinging/pc regelen, dit voorkomt dat we tussendoor de quadcopter opnieuw op moeten starten, dit is dus veiliger en sneller 22
23 Uitleg/theorie software In de software moeten wij met veel dingen rekening houden. In deze paragraaf bespreken wij in het kort de theorie achter een succesvol besturingssysteem voor een quadcopter. Stabiliseren Het meest essentiële dat de quadcopter moet doen tijdens het vliegen is het stabiliseren. En hoewel men vaak denkt dat het stabiliseren van een quadcopter eitje is, is het dat niet. Vaak wordt gedacht dat het stabiliseren niet meer is dan de tilt bepalen en vervolgens met een vooraf bepaalde waarde de motoren aan sturen. Bijvoorbeeld bij een afwijkende tilt naar links, het vermogen van de linker motor hoger maken en die van de rechter motor verlagen tot dat de tilt gecompenseerd is en visa versa. Dit is echter niet een juiste benadering want deze aanpak resulteert in een oncontroleerbare oscillatie met als gevolg een crash. Het hierboven beschreven regelsysteem is te vergelijken met dat van een simpele thermostaat. Als de temperatuur beneden de ingestelde waarde is springt de kachel aan. Nadat de kachel eindelijk is opgewarmd stijgt de temperatuur totdat de kamer temperatuur gelijk is aan de ingestelde waarde, daarna word de kachel weer uitgezet. Maar de kachel is nog wel warm en moet afkoelen. Dus de temperatuur blijft stijgen. Uiteindelijk is de kachel afgekoeld en als gevolg hiervan begint de temperatuur weer langzaam te dalen. Totdat de temperatuur weer lager is dan de ingestelde waarde. Waarna de kachel weer moet opwarmen om vervolgens weer te verwarmen. Dit systeem herhaalt zich steeds. De daadwerkelijke waarde (in dit voorbeeld de temperatuur) schommelt steeds rond de ingestelde waarde (soms wel tot 2 C boven/onder de ingestelde waarde), dit is in dit geval geen ramp. Maar bij een bewegend voorwerp als een quadcopter kunnen we het natuurlijk niet veroorloven dat de quadcopter heen en weer schommelt. En steeds over zijn ingestelde waarde heen schiet. Een quadcopter heeft dus een betere regelaar nodig. PID-regelaar Voor onze quadcopter hebben wij een Proportional Integral Derivative Controller of kortweg PIDregelaar nodig. Een PID regelaar houdt wel rekening met de overshoot (doorschieten) en anticipeert wanneer hij moet stoppen om precies op het setpoint (de ingestelde waarde) uit te komen. Voor een simpele stabilisatie hebben wij twee van deze regelaars nodig. Een voor de x-as en een voor de y-as. Een PID-regelaar moet dan twee motoren aansturen, maar de totale output moet wel in verhouding zijn met die van de andere as omdat de quadcopter anders om zijn as (verticale z-as) gaat draaien. Dit komt omdat wij in een +4 configuratie vliegen, de motoren van de quadcopter draaien verschillende kanten op om het verschil in koppel te compenseren, zie Inleiding pagina 5. Dit is natuurlijk nog maar het topje van de sterk versimpelde ijsberg. 23
 K i : de integratie versterking van de regelaar (I-actie) K d : de differentiatie")
24 De meeste PID-regelaars zien er als volgt uit: ( ) ( ) ( ) ( ) Waarin het foutsignaal e(t) het verschil is van de proces waarde PV(t) en het setpoint SP(t): ( ) ( ) ( ) Met als: u(t): het output signaal van de verschillende gecombineerde acties K p : de proportionele versterking van de regelaar (P-actie) K i : de integratie versterking van de regelaar (I-actie) K d : de differentiatie versterking van de regelaar (D-actie) e(t): de error (verschil) tussen de metingen en het setpoint Proces value(t): de gemeten waadwerkelijke waarde op dat tijdstip Setpoint(t): de ingestelde waarde op dat tijdstip De K p, K i en K d zijn vooraf bepaalde constante waardes. De versterkende constanten hebben verschillende invloeden op de output. Deze moeten afhankelijk van het systeem worden getuned. Een kleine K p waarde zorgt voor een veilige maar langzame weg naar het setpoint. Een hoge K p waarde zorgt voor het zeer snel bereiken van het setpoint, maar als gevolg daarvan krijgt de proces waarde ook een (grote) overshoot ten opzichte van het setpoint. Dus als de K p waarde hoger wordt neemt de reactie van de regelaar toe maar wordt de demping minder. De K i term is de integrerende term, deze zorgt ervoor dat de vorige errors worden bijgehouden. Als de quadcopter stabiel is is u(t) gelijk aan nul, dus ook de i-term is gelijk aan nul. De i-term zorgt ervoor dat de totale error die heeft plaats gevonden ook plaats vind in een tegengestelde richting, dan bevindt hij zich weer op het setpoint. Met de K i -gain bepaal je de prioriteit waarmee het systeem de vorige errors corrigeert. De k d term is de differentiërende term, deze houdt rekening met de snelheidsverandering van de error ten opzichte van het setpoint. Hoe hoger de K d constante hoe agressiever de reactie op de snelheidsverandering van de error. Met de verschillende gains tune je niet alleen het systeem maar geef je ook een ouput range aan. In ons geval hebben wij hoge gains omdat wij de timers zo hebben geconfigureerd dat wij hoge waardes gebruiken (0-1000). 24
25 Plot van gemeten waarde tegen over de tijd, Kp veranderd en Ki en Kd blijven constant. De blauwe lijn is het setpoint. Plot van de gemeten waarde tegen over de tijd, Ki veranderd en Kp en Kd blijven constant. De blauwe lijn is het setpoint. 25
26 Plot van de gemeten waarde tegen over de tijd, Kd veranderd en Kp en Ki blijven constant. De blauwe lijn is het setpoint. Filteren De door ons binnen gekregen sensor data bevat te veel ruis voor direct gebruik. Daarom is het nodig om deze eerst te filteren. Er zijn vele manieren om data te filteren. Wij hebben gekozen voor een laagdoorlaat filter in de vorm van een complementary filter. Zo wordt de hoog frequente data (ruis) eruit gefilterd. We wilden eerst gebruik maken van een kalman filter, maar deze was te complex om te kunnen doorgronden en uit te schrijven voor onze deadline. Een complementary filter gebruikt ook vorige metingen voor de huidige waarde. Vaak heeft deze de vorm van de volgende sequence: ( ) Waarbij x+y=1 en 0 x 1. Met de y waardes geef je de belasting aan van de vorige meting. Dit filter is uit te breiden door meerdere termen toe te voegen door gebruik te maken van nog eerdere metingen. Uitleg software Op dit moment stuurt deze software alleen de motoren aan. En wanneer er draadloos data binnen komt via de UART wordt gecontroleerd of er een noodstop uitgevoerd moet worden, als dit het geval is wordt dit ook daadwerkelijk uitgevoerd. Hoe het aansturen van de motoren werkt en de bijbehorende berekeningen daarvan zijn te vinden in de bijlage onder het motor control board. Deze software wordt later nog uitgebreid met I 2 C voor het uitlezen van de sensoren (zie I 2 C in de bijlage), het filteren van de data en de bovenstaande PID-regelaar. 26
27 Software 27
28 28
29 29
30 5. Afsluiting Hoewel de deadline al snel nadert is ons project nog lang niet ten einde! We hebben veel plezier beleefd met dit project en zeer veel geleerd. We hebben bijvoorbeeld geleerd hoe we de tijd moeten besteden en de projecten moeten opdelen. Maar ook de kunst van het ontwikkelen van printplaten, zowel de theorie als praktijk. Halverwege het project stonden wij voor de keuze om de printen uit te besteden of zelf te ontwikkelen, maar omdat wij optimaal wilden leren van dit profielwerkstuk hebben wij voor de lange en harde weg gekozen. Dit geldt ook voor de software keuze, wij hebben besloten om geen gebruik te maken van bibliotheken. Deze bibliotheken bevatten functies die je veel werk uit handen neemt. Maar hierdoor kan je de software niet in zijn volledigheid doorgronden en dit stelden wij wel als een eis van het project. Vanwege de keuzes die wij gemaakt hebben en omdat wij zoveel aspecten van zowel de hard- als de software moesten begrijpen zitten wij op dit moment nog zonder functionele quadcopter, omdat wij de software nog niet hebben kunnen afronden. Het verslag, als onderdeel van het PWS was helaas noodzakelijk omdat deze deel uit maakt van de beoordeling. Wij hadden deze tijd liever besteed aan het verder knutselen aan de quadcopter, zodat wij hoogstwaarschijnlijk een deels functionele quacopter hadden als demonstratie tijdens de presentatie. Omdat de school niet geïnvesteerd heef in onze quadcopter, is deze ook echt ons eigendom. Ook na het PWS zullen wij doorgaan met het verder ontwikkelen van onze software. Want wat is nou leuker dan een door jezelf ontworpen quadcopter? Wel willen wij nogmaals onze sponsors bedanken voor hun bijdrage. We willen in het bijzonder TiePie engineering bedanken voor het ter beschikking stellen van hun apparatuur. Zonder deze apparatuur had we veel moeten laten uitbesteden. Ik hoop dat u als lezer genoten hebt van dit projectverslag. Wij gaan nu in ieder geval weer verder knutselen. Mocht u nog specifieke vragen hebben, dan kun u ons altijd mailen (Krijn_schouten@hotmail.com). 30
AVR-DOPER MINI ASSEMBLAGE HANDLEIDING + LAYOUT. Geschreven door: Tom Vocke
 AVR-DOPER MINI ASSEMBLAGE HANDLEIDING + LAYOUT Geschreven door: Tom Vocke Datum: 28-09-2010 Inleiding: Dit document bevat alle hardware informatie betreffende de AVR-Doper mini. Het eerste deel zal zich
AVR-DOPER MINI ASSEMBLAGE HANDLEIDING + LAYOUT Geschreven door: Tom Vocke Datum: 28-09-2010 Inleiding: Dit document bevat alle hardware informatie betreffende de AVR-Doper mini. Het eerste deel zal zich
B3C 70cm converter besturing. v1.0 2010 PE5PVB www.het bar.net pe5pvb@het bar.net
 B3C 70cm converter besturing v1.0 2010 PE5PVB www.het bar.net pe5pvb@het bar.net Deze schakeling en de bijbehorende software mag niet worden gedupliceerd voor commerciële verkoop zonder uitdrukkelijke
B3C 70cm converter besturing v1.0 2010 PE5PVB www.het bar.net pe5pvb@het bar.net Deze schakeling en de bijbehorende software mag niet worden gedupliceerd voor commerciële verkoop zonder uitdrukkelijke
Workshop Arduino voor beginners. door TkkrLab Enschede
 Workshop Arduino voor beginners door TkkrLab Enschede Tkkrlab TkkrLab (Tukkerlab) bestaat uit een groep mensen die geïnteresseerd zijn in in technologie, digitale techniek en wetenschap, kortom geeks.
Workshop Arduino voor beginners door TkkrLab Enschede Tkkrlab TkkrLab (Tukkerlab) bestaat uit een groep mensen die geïnteresseerd zijn in in technologie, digitale techniek en wetenschap, kortom geeks.
GEÏNTEGREERDE PROEF. VTI Sint-Laurentius. Pakketweegschaal. Industriële informatie & communicatietechnologie SCHOOLJAAR 2010-2011.
 VTI Sint-Laurentius De school voor Wetenschap, Techniek en Technologie Pr. Thuysbaertlaan 1 9160 Lokeren www.vti-lokeren.be info@vti-lokeren.be GEÏNTEGREERDE PROEF Pakketweegschaal Industriële informatie
VTI Sint-Laurentius De school voor Wetenschap, Techniek en Technologie Pr. Thuysbaertlaan 1 9160 Lokeren www.vti-lokeren.be info@vti-lokeren.be GEÏNTEGREERDE PROEF Pakketweegschaal Industriële informatie
Elektronica bouwen met M.T.S. LEGEO modulen
 1 Elektronica bouwen met M.T.S. LEGEO modulen Door PE1KTH Deel 1. Datum 15-10-2015 Elektronica componenten worden steeds kleiner van afmeting en in SMD gemaakt. Het is dan lastiger om een complete ontvanger,tranceiver
1 Elektronica bouwen met M.T.S. LEGEO modulen Door PE1KTH Deel 1. Datum 15-10-2015 Elektronica componenten worden steeds kleiner van afmeting en in SMD gemaakt. Het is dan lastiger om een complete ontvanger,tranceiver
Elektronica bouwen met M.T.S. LEGEO modulen type B Matrix systeem
 1 Elektronica bouwen met M.T.S. LEGEO modulen type B Matrix systeem Door PE1KTH Deel 2. vervolg. Datum 15-10-2015 Matrix koppel systeem. In het eerder beschreven M.T.S LEGEO systeem met type A modulen
1 Elektronica bouwen met M.T.S. LEGEO modulen type B Matrix systeem Door PE1KTH Deel 2. vervolg. Datum 15-10-2015 Matrix koppel systeem. In het eerder beschreven M.T.S LEGEO systeem met type A modulen
Project 7 Pratende plant Docent Project 7 - Pratende Plant Docent
 Project 7 Pratende plant Docent Project 7 - Pratende Plant Docent Titel Pratende Plant 2 lessen Doel De leerlingen leren in deze twee lessen een opdracht namaken en een nieuw prototype maken met behulp
Project 7 Pratende plant Docent Project 7 - Pratende Plant Docent Titel Pratende Plant 2 lessen Doel De leerlingen leren in deze twee lessen een opdracht namaken en een nieuw prototype maken met behulp
Bouw een deel van het JeeNode schema zoals beschreven op pagina 5 in de JeeNode handleiding in de handout, maar dan op het breadboard.
 Domoticaforum Arduino Workshop 28 november 2010 Lennart Herlaar & Robert Hekkers v1.0 Programma van de workshop 1. Uitdelen workshop kits en handouts. 2. Uitpakken workshop kits en controleren inhoud.
Domoticaforum Arduino Workshop 28 november 2010 Lennart Herlaar & Robert Hekkers v1.0 Programma van de workshop 1. Uitdelen workshop kits en handouts. 2. Uitpakken workshop kits en controleren inhoud.
Bouw je eigen minicomputer
 Bouw je eigen minicomputer Soldeer stap-voor-stap de Diavolino, een open-source computerplatform 1 1 2 3 Je hebt nodig: kniptang, soldeerbout, soldeerdraad, batterijhouder, Diavolino kit van Evil Mad Scientist:
Bouw je eigen minicomputer Soldeer stap-voor-stap de Diavolino, een open-source computerplatform 1 1 2 3 Je hebt nodig: kniptang, soldeerbout, soldeerdraad, batterijhouder, Diavolino kit van Evil Mad Scientist:
voordat we verder gaan raad ik aan om in ieder geval te zorgen dat je het volgende hebt:
 Inleiding Dit artikel is geschreven om enige hulp te bieden bij het "debuggen" van de K8048 Beide zijn zelfbouwkits van velleman en zijn bedoeld voor het programeren Dit artikel is geschreven omdat er
Inleiding Dit artikel is geschreven om enige hulp te bieden bij het "debuggen" van de K8048 Beide zijn zelfbouwkits van velleman en zijn bedoeld voor het programeren Dit artikel is geschreven omdat er
De Arduino-microcontroller in de motorvoertuigentechniek (4)
") De Arduino-microcontroller in de motorvoertuigentechniek () E. Gernaat (ISBN 978-90-7930--6) De Atmel ATmega38/P microcontroller. Uitvoering De ATmega38 is een microprocessor van de Amerikaanse firma ATMEL
De Arduino-microcontroller in de motorvoertuigentechniek () E. Gernaat (ISBN 978-90-7930--6) De Atmel ATmega38/P microcontroller. Uitvoering De ATmega38 is een microprocessor van de Amerikaanse firma ATMEL
Gebruikershandleiding. robotcar.nl
 Gebruikershandleiding robotcar.nl Inhoudsopgave 1 Introductie 2 2 Inventaris 3 3 Uno: een Arduino variant 4 3.1 De pinnen op het Uno board.................... 4 3.2 De Arduino software omgeving...................
Gebruikershandleiding robotcar.nl Inhoudsopgave 1 Introductie 2 2 Inventaris 3 3 Uno: een Arduino variant 4 3.1 De pinnen op het Uno board.................... 4 3.2 De Arduino software omgeving...................
Quadcopter profielwerkstuk Bijlage
 Quadcopter profielwerkstuk Bijlage Inhoudsopgave Bijlage Pagina 1. Materialen 3. a. Frame 3. b. Motoren 4. c. ESCs 5. d. Propellors 6. e. Batterij 7. f. Oplader 8. g. XBee 9. 2. I 2 C-bus (TWI Two Wire
Quadcopter profielwerkstuk Bijlage Inhoudsopgave Bijlage Pagina 1. Materialen 3. a. Frame 3. b. Motoren 4. c. ESCs 5. d. Propellors 6. e. Batterij 7. f. Oplader 8. g. XBee 9. 2. I 2 C-bus (TWI Two Wire
Bouw je eigen minicomputer
 Soldeer stap-voor-stap de Fabschoolino, een open source Arduino. 1 2 3 Je hebt nodig: soldeerbout, soldeersel, batterijhouder, Fabschoolino board (het PCB, ATMEGA 328P (ic) en de losse componenten + beschrijving
Soldeer stap-voor-stap de Fabschoolino, een open source Arduino. 1 2 3 Je hebt nodig: soldeerbout, soldeersel, batterijhouder, Fabschoolino board (het PCB, ATMEGA 328P (ic) en de losse componenten + beschrijving
Besturingspaneel v Raam E-systeem functie omschrijving v109
 Besturingspaneel v Raam E-systeem functie omschrijving v109 Aantal druktoetsen: 4 stuks met de volgende functies: On/off toets voor in- en uitschakelen, toets 1 laagste vermogen, 2 midden stand, 3 max.
Besturingspaneel v Raam E-systeem functie omschrijving v109 Aantal druktoetsen: 4 stuks met de volgende functies: On/off toets voor in- en uitschakelen, toets 1 laagste vermogen, 2 midden stand, 3 max.
Programmering Tiny45 voor de DCC locdecoder
 Programmering Tiny45 voor de DCC locdecoder Dit is een beschrijving voor het programmeren van de Tiny45 van de locdecoder. Voor de eerste programmering is een programmer voor Atmel AVR mikrocontrollers
Programmering Tiny45 voor de DCC locdecoder Dit is een beschrijving voor het programmeren van de Tiny45 van de locdecoder. Voor de eerste programmering is een programmer voor Atmel AVR mikrocontrollers
LocoServo Handleiding
 LocoServo Handleiding HDM12 Disclaimer van Aansprakelijkheid: Het gebruik van alle items die kunnen worden gekocht en alle installatie-instructies die kunnen worden gevonden op deze site is op eigen risico.
LocoServo Handleiding HDM12 Disclaimer van Aansprakelijkheid: Het gebruik van alle items die kunnen worden gekocht en alle installatie-instructies die kunnen worden gevonden op deze site is op eigen risico.
Arduino CURSUS. door Willy - 09-juni-2017
 Arduino CURSUS door Willy - w2@skynet.be, 09-juni-2017 OVERZICHT (1) OVERZICHT (2) Historiek Microcontroller (1) Microcontroller (2) Specificaties - Arduino UNO bord Specificaties - ATmega328P chip LET
Arduino CURSUS door Willy - w2@skynet.be, 09-juni-2017 OVERZICHT (1) OVERZICHT (2) Historiek Microcontroller (1) Microcontroller (2) Specificaties - Arduino UNO bord Specificaties - ATmega328P chip LET
Xilinx JTAG Programmer
 Xilinx JTAG Programmer User Manual Versie 1 14-10-2007 Jeroen Boere 1 Voorwoord Deze beknopte handleiding zal uitleg geven over de Xilinx JTAG programmer. De auteur kan omwille van geen enkele reden verantwoordelijk
Xilinx JTAG Programmer User Manual Versie 1 14-10-2007 Jeroen Boere 1 Voorwoord Deze beknopte handleiding zal uitleg geven over de Xilinx JTAG programmer. De auteur kan omwille van geen enkele reden verantwoordelijk
Bouwbeschrijving UniSAI
 Bouwbeschrijving UniSAI Print maken De layout heeft hele fijne sporen en daarom is fotografisch afdrukken de enige mogelijkheid. Voor het bewerken van de layout gebruik ik het programma Adobe Photoshop
Bouwbeschrijving UniSAI Print maken De layout heeft hele fijne sporen en daarom is fotografisch afdrukken de enige mogelijkheid. Voor het bewerken van de layout gebruik ik het programma Adobe Photoshop
LocoServo Handleiding
 LocoServo Handleiding HDM12 Disclaimer van Aansprakelijkheid: Het gebruik van alle items die kunnen worden gekocht en alle installatie-instructies die kunnen worden gevonden op deze site is op eigen risico.
LocoServo Handleiding HDM12 Disclaimer van Aansprakelijkheid: Het gebruik van alle items die kunnen worden gekocht en alle installatie-instructies die kunnen worden gevonden op deze site is op eigen risico.
Inleiding elektronica Presentatie 1
 Inleiding elektronica Presentatie 1 2 Versie: 18 augustus 2014 Inleiding Elektronica Presentatie 1 16-9-2013 Praktische Elektronica, talk of the day! 2 1 Doel van deze module Herkennen van de algemene
Inleiding elektronica Presentatie 1 2 Versie: 18 augustus 2014 Inleiding Elektronica Presentatie 1 16-9-2013 Praktische Elektronica, talk of the day! 2 1 Doel van deze module Herkennen van de algemene
Technisch ontwerp positiebepaling Smart Blocks
 Technisch ontwerp positiebepaling Smart Blocks Inhoudsopgave 1 Inleiding......3 2 Hardware......4 2.1 Blok....4 Contactpunten......4 Voeding......4 Datapinnen......5 2.2 Basisplaat......5 3 Positiebepaling......6
Technisch ontwerp positiebepaling Smart Blocks Inhoudsopgave 1 Inleiding......3 2 Hardware......4 2.1 Blok....4 Contactpunten......4 Voeding......4 Datapinnen......5 2.2 Basisplaat......5 3 Positiebepaling......6
12.1 Input/output-kaart IOK. Informatieblad 12 input/output-kaart versie 1.0. Beperking aansprakelijkheid
 Beperking aansprakelijkheid De aansprakelijkheid van het bestuur van de HCCM is beperkt als omschreven in informatieblad 1 12 Input/output-kaarten De uitgangen van de input/output-kaart (IOK) hebben dezelfde
Beperking aansprakelijkheid De aansprakelijkheid van het bestuur van de HCCM is beperkt als omschreven in informatieblad 1 12 Input/output-kaarten De uitgangen van de input/output-kaart (IOK) hebben dezelfde
Parallelle poort interface.
 Parallelle poort interface. Bouwbeschrijving kant en klare PCB interface met LUMI led s. Naam : Klas: 2008-2009 EduTechSoft Pagina 2 van 8 Inleiding. Deze bouwbeschrijving hoort bij het project Digitale
Parallelle poort interface. Bouwbeschrijving kant en klare PCB interface met LUMI led s. Naam : Klas: 2008-2009 EduTechSoft Pagina 2 van 8 Inleiding. Deze bouwbeschrijving hoort bij het project Digitale
ES1 Project 1: Microcontrollers
 ES1 Project 1: Microcontrollers Les 3: Eenvoudige externe hardware & hardware programmeren in C Hardware programmeren in C Inmiddels ben je al aardig op gang gekomen met het programmeren van microcontrollers.
ES1 Project 1: Microcontrollers Les 3: Eenvoudige externe hardware & hardware programmeren in C Hardware programmeren in C Inmiddels ben je al aardig op gang gekomen met het programmeren van microcontrollers.
Bouw het schema zoals beschreven in de RBBB handleiding in de handout, maar dan op het breadboard.
 Physical Computing Workshop 20, 21 en 28 mei 2010, 13.00 17.00 uur Lennart Herlaar V1.1 (relaisschakeling aangepast) Programma van de workshop 1. Uitdelen workshop kits en handouts, aftekenen lijst. 2.
Physical Computing Workshop 20, 21 en 28 mei 2010, 13.00 17.00 uur Lennart Herlaar V1.1 (relaisschakeling aangepast) Programma van de workshop 1. Uitdelen workshop kits en handouts, aftekenen lijst. 2.
Syma X8HC en X8HW quickstart handleiding
 Syma X8HC en X8HW quickstart handleiding Deze quickstart handleiding is gemaakt voor de Syma X8HC en de X8HW. Naast deze quickstart handleiding raden wij aan om ook de Engelse handleiding te lezen voor
Syma X8HC en X8HW quickstart handleiding Deze quickstart handleiding is gemaakt voor de Syma X8HC en de X8HW. Naast deze quickstart handleiding raden wij aan om ook de Engelse handleiding te lezen voor
Hand-out Introductieworkshop LED programmeren
 Hand-out Introductieworkshop LED programmeren Inleiding Deze hand-out is bedoeld als naslag voor de introductie workshop LED programmeren. In deze handout vind je de uitleg over LEDs, Arduino s en LED
Hand-out Introductieworkshop LED programmeren Inleiding Deze hand-out is bedoeld als naslag voor de introductie workshop LED programmeren. In deze handout vind je de uitleg over LEDs, Arduino s en LED
Interfacetechnieken Practicumhandleiding
 Interfacetechnieken Groep : ES2, ES3D Peter Bijl 11 April 2016 Inhoud 1 Inleiding... 3 2 Practicum EMC... 4 2.1... Opdracht1... 4 2.2... Opdracht 2... 4 3 Practicum Interfaces... 6 3.1... DMA transfer
Interfacetechnieken Groep : ES2, ES3D Peter Bijl 11 April 2016 Inhoud 1 Inleiding... 3 2 Practicum EMC... 4 2.1... Opdracht1... 4 2.2... Opdracht 2... 4 3 Practicum Interfaces... 6 3.1... DMA transfer
Logo quiz Project Inleiding op de Logo!
 Logo quiz Project Inleiding op de Logo! Project ontwikkelt door: Tim van Schuylenburg Ben van Kruisbergen Inhoudsopgave Projectbeschrijving en Planning 2 Blz. De benodigdheden en aansluitschema 4-8 Complete
Logo quiz Project Inleiding op de Logo! Project ontwikkelt door: Tim van Schuylenburg Ben van Kruisbergen Inhoudsopgave Projectbeschrijving en Planning 2 Blz. De benodigdheden en aansluitschema 4-8 Complete
Voor de bouw van de BITX 20 Tranceiver zijn de volgende stappen handig. Het bordje is in secties ingedeeld (zie de afbeelding).
.") BITX 20 Tranceiver Vs.3.x Voor de bouw van de BITX 20 Tranceiver zijn de volgende stappen handig. Het bordje is in secties ingedeeld (zie de afbeelding). De website: http://golddredgervideo.com/kc0wox/bitxver3new/newmanual.htm
BITX 20 Tranceiver Vs.3.x Voor de bouw van de BITX 20 Tranceiver zijn de volgende stappen handig. Het bordje is in secties ingedeeld (zie de afbeelding). De website: http://golddredgervideo.com/kc0wox/bitxver3new/newmanual.htm
Handleiding voor demonstratie multimeter
 Handleiding voor demonstratie multimeter 24.06.18 3867.70 Omschrijving: Deze demonstratie multimeter is special ontworpen voor educatieve doeleinden en kan de volgende eenheden meten: spanning, stroom.
Handleiding voor demonstratie multimeter 24.06.18 3867.70 Omschrijving: Deze demonstratie multimeter is special ontworpen voor educatieve doeleinden en kan de volgende eenheden meten: spanning, stroom.
Locobuffer Handleiding
 Locobuffer Handleiding HDM09 Disclaimer van Aansprakelijkheid: Het gebruik van alle items die kunnen worden gekocht en alle installatie-instructies die kunnen worden gevonden op deze site is op eigen risico.
Locobuffer Handleiding HDM09 Disclaimer van Aansprakelijkheid: Het gebruik van alle items die kunnen worden gekocht en alle installatie-instructies die kunnen worden gevonden op deze site is op eigen risico.
Handleiding montage decoderprintje 2
 Inhoudsopgave ONDERDELENLIJST DECODERPRINTJE... 2 MONTAGE EN WERKING... 2 INLEIDING... 2 UITLEG VAN DE WERKING VAN EEN DECODERPRINTJE... 2 DE MONTAGE (BOUWPAKKET)... 3 AANSLUITEN DATABUS EN CLOCKSIGNALEN...
Inhoudsopgave ONDERDELENLIJST DECODERPRINTJE... 2 MONTAGE EN WERKING... 2 INLEIDING... 2 UITLEG VAN DE WERKING VAN EEN DECODERPRINTJE... 2 DE MONTAGE (BOUWPAKKET)... 3 AANSLUITEN DATABUS EN CLOCKSIGNALEN...
Project If This Then That
 Project If This Then That WiFi bestuurbare woonhuis ventilator Cairan Steverink G&I1D 17-01-2016 Johan Otten E 17-1-2016 Conceptbeschrijving Een woonhuis ventilator is tegenwoordig aanwezig in bijna alle
Project If This Then That WiFi bestuurbare woonhuis ventilator Cairan Steverink G&I1D 17-01-2016 Johan Otten E 17-1-2016 Conceptbeschrijving Een woonhuis ventilator is tegenwoordig aanwezig in bijna alle
RUKRA REMOTE DIGIT IO_44_NL ARTIKELNUMMER: RK-3004
 ARTIKELNUMMER: RK-3004 Lees deze handleiding zorgvuldig door voordat u start met de montage of programmering RUKRA EUROPE B.V. WWW.RUKRA.EU INFO@RUKRA.EU Handleiding ALGEMENE INFORMATIE De Remote DIGIT
ARTIKELNUMMER: RK-3004 Lees deze handleiding zorgvuldig door voordat u start met de montage of programmering RUKRA EUROPE B.V. WWW.RUKRA.EU INFO@RUKRA.EU Handleiding ALGEMENE INFORMATIE De Remote DIGIT
S88XPressNetLI v1.0. Installatie- en gebruikershandleiding en naslagwerk KDesign Electronics, PCB ontwerp door RoSoft
 S88XPressNetLI v1.0 Installatie- en gebruikershandleiding en naslagwerk. 2008 KDesign Electronics, PCB ontwerp door RoSoft 3.3 De S88XpressNetLI verbinden met de ROCO versterker Aangezien de S88XpressNetLI
S88XPressNetLI v1.0 Installatie- en gebruikershandleiding en naslagwerk. 2008 KDesign Electronics, PCB ontwerp door RoSoft 3.3 De S88XpressNetLI verbinden met de ROCO versterker Aangezien de S88XpressNetLI
EM2 Microcontroller Project. LED cube
 EM2 Microcontroller Project LED cube Door: Dennis Koster Klas: Tc202 Studentnummer: 536496 Docent: Jan Derriks & Ruud Slokker Versie 1.0 (12-1-2009) Inhoudsopgave Inleiding 3 De onderdelen 4 t/ m 6 Het
EM2 Microcontroller Project LED cube Door: Dennis Koster Klas: Tc202 Studentnummer: 536496 Docent: Jan Derriks & Ruud Slokker Versie 1.0 (12-1-2009) Inhoudsopgave Inleiding 3 De onderdelen 4 t/ m 6 Het
Departement industriële wetenschappen en technologie
 Departement industriële wetenschappen en technologie Universitaire Campus, gebouw B B-3590 DIEPENBEEK Tel.: 011-23 07 90 Fax: 011-23 07 99 Aansturen en testen van een hybride infrarood beeldopnemer Abstract
Departement industriële wetenschappen en technologie Universitaire Campus, gebouw B B-3590 DIEPENBEEK Tel.: 011-23 07 90 Fax: 011-23 07 99 Aansturen en testen van een hybride infrarood beeldopnemer Abstract
2010 Handleiding MS12s
 2010 Handleiding MS12s 2 Inhoudsopgave Voorwoord... 2 Technische specificaties:... 3 Overzicht encoder:... 4 Overzicht decoder:... 5 Inbouwen in zender:... 6 Inbouwen in model... 8 Voorbeelden voor aansluiten
2010 Handleiding MS12s 2 Inhoudsopgave Voorwoord... 2 Technische specificaties:... 3 Overzicht encoder:... 4 Overzicht decoder:... 5 Inbouwen in zender:... 6 Inbouwen in model... 8 Voorbeelden voor aansluiten
Revisie geschiedenis. [XXTER & KNX via IP]
![Revisie geschiedenis. [XXTER & KNX via IP]](/thumbs/21/1221943.jpg "Revisie geschiedenis. [XXTER & KNX via IP]") Revisie geschiedenis [XXTER & KNX via IP] Auteur: Freddy Van Geel Verbinding maken met xxter via internet met de KNX bus, voor programmeren of visualiseren en sturen. Gemakkelijk, maar niet zo eenvoudig!
Revisie geschiedenis [XXTER & KNX via IP] Auteur: Freddy Van Geel Verbinding maken met xxter via internet met de KNX bus, voor programmeren of visualiseren en sturen. Gemakkelijk, maar niet zo eenvoudig!
Omschrijving bij bestellijst project Robot Brainbox Robot
 2019 - Omschrijving bij bestellijst project Robot Brainbox Robot NEW 2019: Webpagina met lesvideo s, lesmateriaal, leerlijnen en uitdagingen met duidelijke STEM links U ontvangt een pakket met: www.stemzone.be
2019 - Omschrijving bij bestellijst project Robot Brainbox Robot NEW 2019: Webpagina met lesvideo s, lesmateriaal, leerlijnen en uitdagingen met duidelijke STEM links U ontvangt een pakket met: www.stemzone.be
De beste, mooiste en meest intelligente oplossing voor de automatisering en beveiliging van uw domein.
 De beste, mooiste en meest intelligente oplossing voor de automatisering en beveiliging van uw domein. Fibaro is een complete en krachtige oplossing voor het monitoren, beheren en intelligent automatiseren
De beste, mooiste en meest intelligente oplossing voor de automatisering en beveiliging van uw domein. Fibaro is een complete en krachtige oplossing voor het monitoren, beheren en intelligent automatiseren
Handleiding HCS VB5248
 Handleiding HCS VB5248 Analoge Uitgangsmodule met 8 uitgangen HCS Building Automation Kompasstraat 7a, 2901AM Capelle a/d IJssel Postbus 182, 2900AD Capelle a/d IJssel Tel. +31(0)10 458 00 00 Fax +31(0)10
Handleiding HCS VB5248 Analoge Uitgangsmodule met 8 uitgangen HCS Building Automation Kompasstraat 7a, 2901AM Capelle a/d IJssel Postbus 182, 2900AD Capelle a/d IJssel Tel. +31(0)10 458 00 00 Fax +31(0)10
Programmeren van de Raspberry Pi. http://ardezo.home.xs4all.nl/rpi_programmeren/
 Programmeren van de Raspberry Pi Zaterdag 21 september 2013 De Bilt Johan Swenker http://ardezo.home.xs4all.nl/rpi_programmeren/ Agenda Inleiding Raspberry Pi GPIO Programmeren bash python scratch Interfaces
Programmeren van de Raspberry Pi Zaterdag 21 september 2013 De Bilt Johan Swenker http://ardezo.home.xs4all.nl/rpi_programmeren/ Agenda Inleiding Raspberry Pi GPIO Programmeren bash python scratch Interfaces
IR guns. Montage instruc0es
 IR guns Montage instruc0es Voor het maken van een IR gun hebben we nood aan een afstandsbediening en een speelgoed wapen. Anderzijds hebben we ook nog een IR ontvanger, Arduino printplaat. Na het maken
IR guns Montage instruc0es Voor het maken van een IR gun hebben we nood aan een afstandsbediening en een speelgoed wapen. Anderzijds hebben we ook nog een IR ontvanger, Arduino printplaat. Na het maken
MIDI STURING voor SERVO s
 MIDI STURING voor SERVO s Vanuit mijn idee om Marieke te maken, een pop die als dirigent optreedt bij het afspelen van MIDI muziek heb ik een schakeling gemaakt die behalve voor zo n pop ook voor andere
MIDI STURING voor SERVO s Vanuit mijn idee om Marieke te maken, een pop die als dirigent optreedt bij het afspelen van MIDI muziek heb ik een schakeling gemaakt die behalve voor zo n pop ook voor andere
Een Simpele RF Ontvanger
 Een Simpele RF Ontvanger Een eenvoudige schakeling rond de RRFQ1 module Samenvatting De hierbij gepresenteerde schakeling vormt een eenvoudige ontvanger voor het ontvangen van seriële data over een smalband
Een Simpele RF Ontvanger Een eenvoudige schakeling rond de RRFQ1 module Samenvatting De hierbij gepresenteerde schakeling vormt een eenvoudige ontvanger voor het ontvangen van seriële data over een smalband
Bouw het schema zoals beschreven op pagina 5 in de RBBB handleiding in de handout, maar dan op het breadboard.
 Physical Computing Workshop 23 en 30 november 2010, 09.00 13.00 uur en 13.00 17.00 uur Lennart Herlaar V2.0 (aangepast voor de tweede serie workshops) Programma van de workshop 1. Uitdelen workshop kits
Physical Computing Workshop 23 en 30 november 2010, 09.00 13.00 uur en 13.00 17.00 uur Lennart Herlaar V2.0 (aangepast voor de tweede serie workshops) Programma van de workshop 1. Uitdelen workshop kits
PROJECT 2 - MAZE DRIVE - OFFERTE RICK VAN VONDEREN
 PROJECT 2 - MAZE DRIVE - OFFERTE RICK VAN VONDEREN 13 DECEMBER 2017 Inhoudsopgave 1 Inleiding 2 2 Functioneel Ontwerp 3 2.1 Doel 3 2.2 Functionele eisen 3 2.3 Scenario s 3 3 Technisch Ontwerp 4 3.1 Niet-functionele
PROJECT 2 - MAZE DRIVE - OFFERTE RICK VAN VONDEREN 13 DECEMBER 2017 Inhoudsopgave 1 Inleiding 2 2 Functioneel Ontwerp 3 2.1 Doel 3 2.2 Functionele eisen 3 2.3 Scenario s 3 3 Technisch Ontwerp 4 3.1 Niet-functionele
Zelfbouw frequentieteller
 Zelfbouw frequentieteller De frequentieteller die hier beschreven is, is een teller die gebruik maakt van de software van JG6DFK. De teller is opgebouwd met een PIC processor, namelijk de bekende PIC 16F84.
Zelfbouw frequentieteller De frequentieteller die hier beschreven is, is een teller die gebruik maakt van de software van JG6DFK. De teller is opgebouwd met een PIC processor, namelijk de bekende PIC 16F84.
VTI Sint-Laurentius De school voor Wetenschap, Techniek en Technologie Pr. Thuysbaertlaan 1 9160 Lokeren www.vti-lokeren.be info@vti-lokeren.
 VTI Sint-Laurentius De school voor Wetenschap, Techniek en Technologie Pr. Thuysbaertlaan 1 9160 Lokeren www.vti-lokeren.be info@vti-lokeren.be GEÏNTEGREERDE PROEF Automatische schuifdeur Industriële informatie
VTI Sint-Laurentius De school voor Wetenschap, Techniek en Technologie Pr. Thuysbaertlaan 1 9160 Lokeren www.vti-lokeren.be info@vti-lokeren.be GEÏNTEGREERDE PROEF Automatische schuifdeur Industriële informatie
Shield V 1.0. Montage handleiding (voor dummies)
") Shield V 1.0 Montage handleiding (voor dummies) De opzetprint is specifiek gemaakt voor gebruikers van het hobbyproject Nodo, een domotica-oplossing op basis van een Arduino. Voor verdere informatie over
Shield V 1.0 Montage handleiding (voor dummies) De opzetprint is specifiek gemaakt voor gebruikers van het hobbyproject Nodo, een domotica-oplossing op basis van een Arduino. Voor verdere informatie over
105.663. Bouwpak ket Escape robot. Productinformatie: Benodigd gereedschap voor de bouw van de Escape robot: Stuklijst elektronische onderdelen:
 k e i n u s i 105.663 Bouwpak ket Escape robot Productinformatie: De Escape robot (ontsnappings-robot) werkt als een robot met kunstmatige intelligentie. Hij slaagt er altijd in zijn weg uit een doolhof
k e i n u s i 105.663 Bouwpak ket Escape robot Productinformatie: De Escape robot (ontsnappings-robot) werkt als een robot met kunstmatige intelligentie. Hij slaagt er altijd in zijn weg uit een doolhof
KAEDU : Outputs en inputs
 KAEDU : Outputs en inputs LED Er zijn in totaal 6 LEDS (exclusief de IR) die je kan gebruiken. Hiervoor moeten de overeenkomstige jumpers wel in de juiste stand staan. Zoals je op onderstaande foto ziet
KAEDU : Outputs en inputs LED Er zijn in totaal 6 LEDS (exclusief de IR) die je kan gebruiken. Hiervoor moeten de overeenkomstige jumpers wel in de juiste stand staan. Zoals je op onderstaande foto ziet
Technology, Innovation & Society Delft
 Technology, Innovation & Society Delft VOORBLAD SCHRIFTELIJKE TOETSEN OPLEIDING TOETSCODE GROEP : ELEKTROTECHNIEK : MICPRG-sc1 : EQ1 TOETSDATUM : 25 JANUARI 2013 TIJD : 15.00 16.30 uur AANTAL PAGINA S
Technology, Innovation & Society Delft VOORBLAD SCHRIFTELIJKE TOETSEN OPLEIDING TOETSCODE GROEP : ELEKTROTECHNIEK : MICPRG-sc1 : EQ1 TOETSDATUM : 25 JANUARI 2013 TIJD : 15.00 16.30 uur AANTAL PAGINA S
Wonderfoon. Bouwbeschrijving en gebruikshandleiding. Ivo Schooneman - 3 mei 2019 WONDERFOON BOUWBESCHRIJVING EN GEBRUIKSHANDLEIDING 1
 Wonderfoon Bouwbeschrijving en gebruikshandleiding Ivo Schooneman - 3 mei 2019 WONDERFOON BOUWBESCHRIJVING EN GEBRUIKSHANDLEIDING 1 Hoe bouw je een Wonderfoon? Een Wonderfoon is een oud jaren 60 toestel
Wonderfoon Bouwbeschrijving en gebruikshandleiding Ivo Schooneman - 3 mei 2019 WONDERFOON BOUWBESCHRIJVING EN GEBRUIKSHANDLEIDING 1 Hoe bouw je een Wonderfoon? Een Wonderfoon is een oud jaren 60 toestel
Workshop Arduino Uno. Touw dag 6 juni 2015 Harold Pootjes en Simon Pauw
 Workshop Arduino Uno Touw dag 6 juni 2015 Harold Pootjes en Simon Pauw Arduino Uno Pagina 2 Een programmeerbare controller The Arduino Uno is a programmable microcontroller board based on the ATmega 328.
Workshop Arduino Uno Touw dag 6 juni 2015 Harold Pootjes en Simon Pauw Arduino Uno Pagina 2 Een programmeerbare controller The Arduino Uno is a programmable microcontroller board based on the ATmega 328.
Handleiding RD5060 SPRAAKMODULE MONTAGE-INSTRUCTIES. RD5060 II /V6ip
 Handleiding RD5060 II /V6ip RD5060 SPRAAKMODULE De RD5060 is een module die, in combinatie met een RD6201, boodschappen kan doorgeven naar semadigits of naar particulieren. In beide gevallen wordt gebruik
Handleiding RD5060 II /V6ip RD5060 SPRAAKMODULE De RD5060 is een module die, in combinatie met een RD6201, boodschappen kan doorgeven naar semadigits of naar particulieren. In beide gevallen wordt gebruik
Frequentie standaard PA0WSO
 Frequentie standaard PA0WSO Wim Schaap PA0WSO Vollenhove 11-01-2006 Deze frequentie standaard is opgebouwd uit verschillende subsysteem printen bestaande uit: Ontvanger Hierop is gemonteerd de Rockwell
Frequentie standaard PA0WSO Wim Schaap PA0WSO Vollenhove 11-01-2006 Deze frequentie standaard is opgebouwd uit verschillende subsysteem printen bestaande uit: Ontvanger Hierop is gemonteerd de Rockwell
Parallelle poort interface.
 Parallelle poort interface. Bouwbeschrijving van de print interface met transistoren en MR16 spots. Naam : Klas: 2008 EduTechSoft Pagina 2 van 10 Inleiding. Deze bouwbeschrijving hoort bij het project
Parallelle poort interface. Bouwbeschrijving van de print interface met transistoren en MR16 spots. Naam : Klas: 2008 EduTechSoft Pagina 2 van 10 Inleiding. Deze bouwbeschrijving hoort bij het project
1. Kopieer de bestanden die in de html directory staan, naar de html directory van HomeSeer.
 Homeseer Integratie Voor de integratie van het JeeLabs platform in Homeseer maken we gebruik van een Open Source pakket genaamd JeeLink for HomeSeer (http://sourceforge.net/projects/jeeseer/) van Tijl
Homeseer Integratie Voor de integratie van het JeeLabs platform in Homeseer maken we gebruik van een Open Source pakket genaamd JeeLink for HomeSeer (http://sourceforge.net/projects/jeeseer/) van Tijl
Arduino. Workshop. 20 juni 2014 Peter Struwe Stichting De Jonge Onderzoekers Groningen
 Arduino Workshop Beta-docentendag 20 juni 2014 Peter Struwe Stichting De Jonge Onderzoekers Groningen Wat is een microcontroller? Maak een computer met alleen het meest noodzakelijke: processor geheugen
Arduino Workshop Beta-docentendag 20 juni 2014 Peter Struwe Stichting De Jonge Onderzoekers Groningen Wat is een microcontroller? Maak een computer met alleen het meest noodzakelijke: processor geheugen
Technologie geïntegreerd in verlichting. Rob Verbeelen. December, 2014
 Technologie geïntegreerd in verlichting Rob Verbeelen Luxendi - Xicato Benelux www.luxendi.com December, 2014 Welke technologie kan je integreren in licht? LED lichtbron(led array) Elektronische driver
Technologie geïntegreerd in verlichting Rob Verbeelen Luxendi - Xicato Benelux www.luxendi.com December, 2014 Welke technologie kan je integreren in licht? LED lichtbron(led array) Elektronische driver
PIC Callgever Door PA1RUM
 PIC Callgever Door PA1RUM Aanleiding Tijdens de radiokampweek 2008 is deze callgever met veel enthousiasme gebouwd. Niet alleen omdat het een zeer eenvoudig en veelzijdig ontwerp is, maar ook omdat het
PIC Callgever Door PA1RUM Aanleiding Tijdens de radiokampweek 2008 is deze callgever met veel enthousiasme gebouwd. Niet alleen omdat het een zeer eenvoudig en veelzijdig ontwerp is, maar ook omdat het
MotorControl gebruiksaanwijzing V3 vanaf softwareversie 2.0e
 Inhoudsopgave INHOUDSOPGAVE...1 INLEIDING...3 UITVOERING...3 MC55081...3 MC55082...3 AANSPRAKELIJKHEID EN GARANTIE...3 ALGEMENE WERKING...4 Maximale stuurtijd beveiliging...4 Omschakel beveiliging...4
Inhoudsopgave INHOUDSOPGAVE...1 INLEIDING...3 UITVOERING...3 MC55081...3 MC55082...3 AANSPRAKELIJKHEID EN GARANTIE...3 ALGEMENE WERKING...4 Maximale stuurtijd beveiliging...4 Omschakel beveiliging...4
FORTH op de 80C535 processor met het ATS535 board.
 FORTH op de 80C535 processor met het ATS535 board. ATS535 Het ATS535 board met 8052- ANS-Forth, is een product van de HCC Forth GG en Atelec Hoorn. Het board met de ingebouwde software is een uitstekend
FORTH op de 80C535 processor met het ATS535 board. ATS535 Het ATS535 board met 8052- ANS-Forth, is een product van de HCC Forth GG en Atelec Hoorn. Het board met de ingebouwde software is een uitstekend
Hydrofoon versterker. Een versterker voor de Aquarian H2a. Betreft: Hydrofoon versterker. Door: David Boelee,
 Hydrofoon versterker Een versterker voor de Aquarian H2a Betreft: Door: Opdrachtgever: Hydrofoon versterker David Boelee, davidboelee@gmail.com Hogeschool Rotterdam, Kenniscentrum Duurzame Havenstad Kees
Hydrofoon versterker Een versterker voor de Aquarian H2a Betreft: Door: Opdrachtgever: Hydrofoon versterker David Boelee, davidboelee@gmail.com Hogeschool Rotterdam, Kenniscentrum Duurzame Havenstad Kees
Accelerometer project 2010 Microcontroller printje op basis van de NXP-LPC2368
 Accelerometer project 2010 Microcontroller printje op basis van de NXP-LPC2368 Handleiding bij het gebruik van een microcontroller in het Accelerometerproject (Project II) Er zijn speciaal voor het Accelerometerproject
Accelerometer project 2010 Microcontroller printje op basis van de NXP-LPC2368 Handleiding bij het gebruik van een microcontroller in het Accelerometerproject (Project II) Er zijn speciaal voor het Accelerometerproject
Kennisdossier Regeltechniek
 Kennisdossier Regeltechniek Paul Stefaan Mooij Ruud Alderden Sander Rijnsaardt Ashwien Chotoe 1 Inleiding Dit kennisdossier is opgebouwd uit oude meet resultaten van proef 6. En met behulp van zowel Matlab
Kennisdossier Regeltechniek Paul Stefaan Mooij Ruud Alderden Sander Rijnsaardt Ashwien Chotoe 1 Inleiding Dit kennisdossier is opgebouwd uit oude meet resultaten van proef 6. En met behulp van zowel Matlab
Project DTMF ATV Repeater besturing voor PI6HLM
 Project DTMF ATV Repeater besturing voor PI6HLM Hoe de nieuwe DTMF besturing is ontstaan: enige tijd geleden vroeg ik aan enkele leden of er niet een stukje hardware was waar de DTMF codelijst instond
Project DTMF ATV Repeater besturing voor PI6HLM Hoe de nieuwe DTMF besturing is ontstaan: enige tijd geleden vroeg ik aan enkele leden of er niet een stukje hardware was waar de DTMF codelijst instond
Opgave 1 Opbouwen van een servomotor-systeem
 Opgave 1 Opbouwen van een servomotor-systeem Leerdoelen Na het voltooien van deze opgave: Ben je bekend met het veilig opbouwen van een servomotor systeem Ben je bekend met de basisprincipes van schema
Opgave 1 Opbouwen van een servomotor-systeem Leerdoelen Na het voltooien van deze opgave: Ben je bekend met het veilig opbouwen van een servomotor systeem Ben je bekend met de basisprincipes van schema
ES1 Project 1: Microcontrollers
 ES1 Project 1: Microcontrollers Les 2: Architectuur ATmega32 en STK500 Door Hugo Arends, september 2012 Architectuur ATmega32 Een uitgebreide en gedetailleerde beschrijving van de ATmega32 microcontroller
ES1 Project 1: Microcontrollers Les 2: Architectuur ATmega32 en STK500 Door Hugo Arends, september 2012 Architectuur ATmega32 Een uitgebreide en gedetailleerde beschrijving van de ATmega32 microcontroller
Inventarisatie Controleer, voor je aan de gang gaat, of je alle onderdelen ook daadwerkelijk hebt.
 Inventarisatie Controleer, voor je aan de gang gaat, of je alle onderdelen ook daadwerkelijk hebt. Deze onderdelen heb je nodig: PCB (uiteraard) MCP1702-3302 - U1 (Low-current Voltage Regulator) BC547
Inventarisatie Controleer, voor je aan de gang gaat, of je alle onderdelen ook daadwerkelijk hebt. Deze onderdelen heb je nodig: PCB (uiteraard) MCP1702-3302 - U1 (Low-current Voltage Regulator) BC547
Handleiding HCS VB5224
 Handleiding HCS VB5224 Digitale Uitgangsmodule met 4 uitgangen HCS Building Automation Kompasstraat 7, 2901AM Capelle a/d IJssel Postbus 182, 2900AD Capelle a/d IJssel Tel. +31(0)10 458 00 00 Fax +31(0)10
Handleiding HCS VB5224 Digitale Uitgangsmodule met 4 uitgangen HCS Building Automation Kompasstraat 7, 2901AM Capelle a/d IJssel Postbus 182, 2900AD Capelle a/d IJssel Tel. +31(0)10 458 00 00 Fax +31(0)10
programmeren leeromgeving
 DO-ProLO programmeren leeromgeving Een leeromgeving voor iedereen in de leeftijd van 8 tot 80 jaar. Dit is een uitgave van Duurzame Onderneming Kennemerland. Voor meer informatie ga naar: www.duurzame-onderneming-kennemerland.nl
DO-ProLO programmeren leeromgeving Een leeromgeving voor iedereen in de leeftijd van 8 tot 80 jaar. Dit is een uitgave van Duurzame Onderneming Kennemerland. Voor meer informatie ga naar: www.duurzame-onderneming-kennemerland.nl
A Quick Start Guide: AVR programmeren
 A Quick Start Guide: AVR programmeren In deze guide wordt uitgelegd hoe men kan beginnnen met het programeren van een ATMEL AVR microcontroller. Er zal een testprogramma uit de software library AVRlib
A Quick Start Guide: AVR programmeren In deze guide wordt uitgelegd hoe men kan beginnnen met het programeren van een ATMEL AVR microcontroller. Er zal een testprogramma uit de software library AVRlib
Microcontrollers. Bart Kardinaal E204 221490 Verslag microcontrollers 28-11-06. Rev 1.0 Status definitief.
 Microcontrollers Bart Kardinaal E204 221490 Verslag microcontrollers 28-11-06 Rev 1.0 Status definitief. Voorword. Dit verslag is geschreven in het kader van de opdracht, als onderdeel van het eerste studiejaar
Microcontrollers Bart Kardinaal E204 221490 Verslag microcontrollers 28-11-06 Rev 1.0 Status definitief. Voorword. Dit verslag is geschreven in het kader van de opdracht, als onderdeel van het eerste studiejaar
One-touch raambediening D.I.Y. NA/NB
 One-touch raambediening D.I.Y. NA/NB Wil je je ramen automatisch openen/sluiten terwijl je je dak open/dicht doet zodat je voortaan 10 seconden eerder binnen bent op je werk? Wil je lekker sportief door
One-touch raambediening D.I.Y. NA/NB Wil je je ramen automatisch openen/sluiten terwijl je je dak open/dicht doet zodat je voortaan 10 seconden eerder binnen bent op je werk? Wil je lekker sportief door
Versie Datum Status Auteur(s) Opmerking juli 2017 Definitief Carol Esmeijer
 Opmerking juli 2017 Definitief Carol Esmeijer") Compad Bakkerij Afdrukprocess Document beheer Versie Datum Status Auteur(s) Opmerking 1.0 12 juli 2017 Definitief Carol Esmeijer Inleiding In dit document wordt een toelichting gegeven op de manier waarop
Compad Bakkerij Afdrukprocess Document beheer Versie Datum Status Auteur(s) Opmerking 1.0 12 juli 2017 Definitief Carol Esmeijer Inleiding In dit document wordt een toelichting gegeven op de manier waarop
Trillingen en geluid wiskundig. 1 De sinus van een hoek 2 Uitwijking van een trilling berekenen 3 Macht en logaritme 4 Geluidsniveau en amplitude
 Trillingen en geluid wiskundig 1 De sinus van een hoek 2 Uitwijking van een trilling berekenen 3 Macht en logaritme 4 Geluidsniveau en amplitude 1 De sinus van een hoek Eenheidscirkel In de figuur hiernaast
Trillingen en geluid wiskundig 1 De sinus van een hoek 2 Uitwijking van een trilling berekenen 3 Macht en logaritme 4 Geluidsniveau en amplitude 1 De sinus van een hoek Eenheidscirkel In de figuur hiernaast
De AT90CAN microprocessor van ATMEL in de motorvoertuigentechniek (4)
") De AT90CAN microprocessor van ATMEL in de motorvoertuigentechniek (4) Timloto o.s. / E. Gernaat / ISBN 978-90-79302-06-2 Op dit werk is de Creative Commens Licentie van toepassing. Uitgave: september 2012
De AT90CAN microprocessor van ATMEL in de motorvoertuigentechniek (4) Timloto o.s. / E. Gernaat / ISBN 978-90-79302-06-2 Op dit werk is de Creative Commens Licentie van toepassing. Uitgave: september 2012
APPINVENTOR is een 100% gratis online tool waarmee je zelf apps kan maken voor Android devices (niet voor Apple).
.") APPINVENTOR APPINVENTOR is een 100% gratis online tool waarmee je zelf apps kan maken voor Android devices (niet voor Apple). De open politiek van Android maakt dat het ontwikkelen van apps voor Android
APPINVENTOR APPINVENTOR is een 100% gratis online tool waarmee je zelf apps kan maken voor Android devices (niet voor Apple). De open politiek van Android maakt dat het ontwikkelen van apps voor Android
Inleiding. Leerdoelen
 1 Inleiding Voor je ligt een boek waarin je op een praktische manier leert hoe je de Arduino moet programmeren en kunt toepassen in de praktijk. Het is de bedoeling dat je de grenzen van deze minicomputer
1 Inleiding Voor je ligt een boek waarin je op een praktische manier leert hoe je de Arduino moet programmeren en kunt toepassen in de praktijk. Het is de bedoeling dat je de grenzen van deze minicomputer
MiniPlex-41 NMEA-0184 multiplexer Handleiding
 MiniPlex-41 NMEA-0184 multiplexer Handleiding MiniPlex-41, V1.0 Firmware V1.10 CustomWare, 2002 Inleiding De MiniPlex-41 is een vierkanaals datamultiplexer, waarmee u meerdere NMEA-0183 instrumenten op
MiniPlex-41 NMEA-0184 multiplexer Handleiding MiniPlex-41, V1.0 Firmware V1.10 CustomWare, 2002 Inleiding De MiniPlex-41 is een vierkanaals datamultiplexer, waarmee u meerdere NMEA-0183 instrumenten op
RF STANDAARD THERMOSTAAT
 RF STANDAARD THERMOSTAAT Thermostaat Ontvanger PRESENTATIE - Radio frequente RF thermostaat (433.92 Mhz). - Elk combinatie thermostaat en ontvanger is reeds op elkaar afgestemd. - Met de schakelaar (mode
RF STANDAARD THERMOSTAAT Thermostaat Ontvanger PRESENTATIE - Radio frequente RF thermostaat (433.92 Mhz). - Elk combinatie thermostaat en ontvanger is reeds op elkaar afgestemd. - Met de schakelaar (mode
If This Then That. Koen van Eijk Klas 1B
 If This Then That Koen van Eijk Klas 1B De Kick-off Het project If This, Then that draait om het leren gebruiken en ontdekken van de Arduino. De Arduino is een micro-controller, hij controleert (bestuurd)
If This Then That Koen van Eijk Klas 1B De Kick-off Het project If This, Then that draait om het leren gebruiken en ontdekken van de Arduino. De Arduino is een micro-controller, hij controleert (bestuurd)
Inhoud: Voorwoord. Dankwoord. Het LED-bordje. Onderdelen. Bouwbeschrijving
 L.E.D. Bordje. Inhoud: Voorwoord Dankwoord Het LED-bordje Onderdelen Bouwbeschrijving Voorwoord Naast het gebruik van onze oude trouwe Grundy NewBrain computer hebben we nog een interesse: Het aansturen
L.E.D. Bordje. Inhoud: Voorwoord Dankwoord Het LED-bordje Onderdelen Bouwbeschrijving Voorwoord Naast het gebruik van onze oude trouwe Grundy NewBrain computer hebben we nog een interesse: Het aansturen
Trek de pennenrijen en hun tegendelen weer uit elkaar zodat je componenten aan de experimenteerprint kan toevoegen.
 Ter lering en vermaak een https://3d-mechatronics.de/de/ispindel-diy-setkomplett_151.html]bouwpakket gekocht voor een ispindel op basis van een experimenteerprint. De https://github.com/universam1/ispindel/blob/master/docs/ispindelbreadboard.md
Ter lering en vermaak een https://3d-mechatronics.de/de/ispindel-diy-setkomplett_151.html]bouwpakket gekocht voor een ispindel op basis van een experimenteerprint. De https://github.com/universam1/ispindel/blob/master/docs/ispindelbreadboard.md
De nieuwe Hydrovar generatie: Toegenomen flexibiliteit en besturing
 De nieuwe Hydrovar generatie: Toegenomen flexibiliteit en besturing De nieuwe generatie Hydrovar drukverhogingssets brengt pompen naar een hoger niveau van flexibiliteit en efficiëntie. Montage op de
De nieuwe Hydrovar generatie: Toegenomen flexibiliteit en besturing De nieuwe generatie Hydrovar drukverhogingssets brengt pompen naar een hoger niveau van flexibiliteit en efficiëntie. Montage op de
Het effect is eenvoudig te bouwen en daarom ook voor beginnende effectbouwers zeer geschikt.
 WWW.-ONLINE.NL The Screaming Parrot Treble Booster 1 Inleiding The Screaming Parrot is een treble booster gebaseerd op de Electro Harmonix Screaming Bird. Het origineel werd eind jaren 60 geïntroduceerd.
WWW.-ONLINE.NL The Screaming Parrot Treble Booster 1 Inleiding The Screaming Parrot is een treble booster gebaseerd op de Electro Harmonix Screaming Bird. Het origineel werd eind jaren 60 geïntroduceerd.
Naam: Huseyin Ayaz St. Nummer: 1683039 Groep: imm08209 Universiteit der dromen
 Naam: Huseyin Ayaz St. Nummer: 1683039 Groep: imm08209 Universiteit der dromen Onze film gaat over een droom van een student die de Vrije universiteit doorloopt en aan het eind van het film woedend wakker
Naam: Huseyin Ayaz St. Nummer: 1683039 Groep: imm08209 Universiteit der dromen Onze film gaat over een droom van een student die de Vrije universiteit doorloopt en aan het eind van het film woedend wakker
Netwerk Interfacing Data Logging.
 Handleiding Netwerk Interfacing Data Logging. EduTechSoft.nl 2009-2010 H.O.Boorsma. Pagina - 2 - Netwerk Interfacing Data Logging Pagina - 3 - Inhoud Inleiding.... 4 Beschrijving van het programma....
Handleiding Netwerk Interfacing Data Logging. EduTechSoft.nl 2009-2010 H.O.Boorsma. Pagina - 2 - Netwerk Interfacing Data Logging Pagina - 3 - Inhoud Inleiding.... 4 Beschrijving van het programma....
TREVLER AIR Model GV300 - Inbouw
 HANDLEIDING TREVLER AIR Model GV300 - Inbouw WAARSCHUWING: Stel de Trevler niet bloot aan: - water - andere vloeibare substanties - extreme hitte of kou Open de behuizing van de Trevler nooit, om gevaar
HANDLEIDING TREVLER AIR Model GV300 - Inbouw WAARSCHUWING: Stel de Trevler niet bloot aan: - water - andere vloeibare substanties - extreme hitte of kou Open de behuizing van de Trevler nooit, om gevaar
Workshop Arduino voor beginners deel 2
 Workshop Arduino voor beginners deel 2 Voor deze workshop is het van belang dat je deel 1 van de workshop hebt afgerond. In deze workshop zitten meerdere opdrachten die elkaar niet allemaal op hoeven te
Workshop Arduino voor beginners deel 2 Voor deze workshop is het van belang dat je deel 1 van de workshop hebt afgerond. In deze workshop zitten meerdere opdrachten die elkaar niet allemaal op hoeven te
Opmerking: afhankelijk van uw configuratie is de print voorzien van de benodigde componenten.
 Gefeliciteerd met de aankoop van deze PCI- I/ O - kaart. Lees vóór u de kaart gaat installeren, de instructies in deze gebruiksaanwijzing zorgvuldig. Bewaar de gebruiksaanwijzing voor latere naslag. Controleer
Gefeliciteerd met de aankoop van deze PCI- I/ O - kaart. Lees vóór u de kaart gaat installeren, de instructies in deze gebruiksaanwijzing zorgvuldig. Bewaar de gebruiksaanwijzing voor latere naslag. Controleer
Autonoom vinden van een object met een quadcopter
 Universiteit van Amsterdam Autonoom vinden van een object met een quadcopter Sebastiaan Joustra (10516999) Joeri Bes (10358234) Joeri Sleegers (10631186) Bram Smit (10666656) 27 juni 2014 1 Abstract Dit
Universiteit van Amsterdam Autonoom vinden van een object met een quadcopter Sebastiaan Joustra (10516999) Joeri Bes (10358234) Joeri Sleegers (10631186) Bram Smit (10666656) 27 juni 2014 1 Abstract Dit
Betaalbaar Home Control. Presentatie op bijeenkomst van EmSE: Embedded Systems Eindhoven
 EmSE presentatie Betaalbaar Home Control Presentatie op bijeenkomst van EmSE: Embedded Systems Eindhoven Ad-hoc presentatie aan de hand van een project waar ik nog mee bezig ben... Nog niet alles is perfect
EmSE presentatie Betaalbaar Home Control Presentatie op bijeenkomst van EmSE: Embedded Systems Eindhoven Ad-hoc presentatie aan de hand van een project waar ik nog mee bezig ben... Nog niet alles is perfect