Rubik s Cube Solver. Silke Knossen ( ) Daniël van de Pavert ( ) Kim Gouweleeuw ( ) Daniël Vink ( ) Juni 2016
|
|
|
- Gerarda de Winter
- 7 jaren geleden
- Aantal bezoeken:
Transcriptie
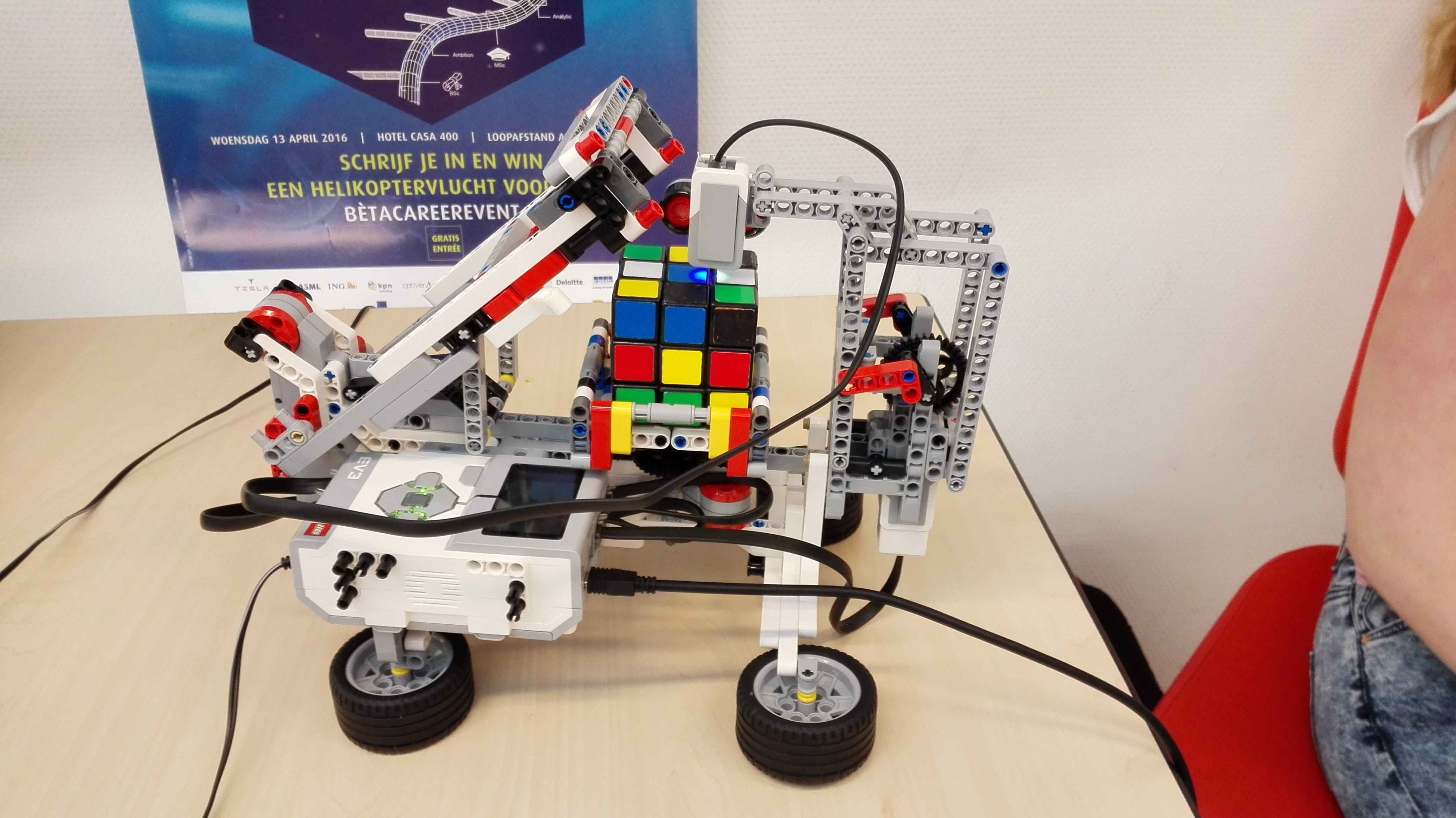
1 Rubik s Cube Solver Silke Knossen ( ) Daniël van de Pavert ( ) Kim Gouweleeuw ( ) Daniël Vink ( ) Juni 2016 Inleiding Dit project gaat om een robot iets te laten doen wat grenzen verlegt en innovatief is. Wij gaan met de Mindstorm EV3 pakketten zelf een robot bouwen die een Rubik s Cube oplost. Om dit tot stand te laten komen moet de robot een bakje hebben waar de Rubik s Cube inligt. Dit bakje moet horizontaal gedraaid kunnen worden. Bovendien moet de robot een grijparm hebben om de Rubik s Cube verticaal om te draaien en hem vast te houden zodat alleen de onderste rij gedraaid wordt. Verder heeft de robot een kleurherkenningssensor nodig waardoor de robot kan zien hoe de Rubik s Cube er op dat moment uitziet. De robot moet kunnen zien of er daadwerkelijk een Rubik s Cube in zijn bakje ligt. Daarvoor wordt een infraroodsensor gebruikt. Daarmee kan de afstand tussen de sensor en een object worden bepaald. Wanneer de afstand tot een voorwerp kleiner is dan een bepaalde waarde, ligt er dus een kubus in het bakje en mag de robot beginnen met het oplossen. Om het probleem op te lossen is het noodzakelijk een algoritme voor het Rubik s Cube probleem te schrijven nadat de robot gebouwd is. Het algoritme gaat uit van een beginstaat en een eindstaat. Er moet een weg worden gevonden van de beginstaat naar de eindstaat. Hiervoor is een representatie van de Rubik s Cube nodig. De representatie van de beginstaat wordt steeds geüpdate naar een tussenstaat tot de eindstaat is bereikt. Deze weg zal het snelst en best worden gevonden met behulp van het A* algoritme. Voortgangsreportage Dag 1 Robot bouwen Om de robot te bouwen hebben wij ons laten inspireren op een voorbeeld. Dit voorbeeld vereiste echter onderdelen die wij niet tot onze beschikking hadden. We hebben dit opgelost door de werking van bepaalde delen van de robot te bestuderen en dit met de onderdelen die we wel tot onze beschikking hadden na te bouwen. De robot is uiteindelijk in theorie functioneel voor ons probleem. Het moet nog blijken of dit in de praktijk ook het geval is. Dit kan pas worden getest wanneer er een algoritme is geschreven. Midden op de robot is een bakje gemaakt met de mogelijkheid om te draaien door de aansluiting op een grote motor. Dit is het bakje waar de Rubik s Cube in kan liggen. Ook is er, aangesloten op de tweede grote motor, een grijparm gemaakt die de Rubik s Cube vast kan houden terwijl het bakje draait. Dit zorgt ervoor dat alleen de onderste laag van de kubus gedraaid wordt. Bovendien maakt deze arm het mogelijk de Rubik s Cube een kwartslag te kantelen. Deze drie elementaire bewegingen kunnen samen alle bewegingen maken die nodig zijn voor het oplossen van de Rubik s Cube. Verder hebben we een kleurensensor aangesloten op de kleine motor, zodat deze kan bewegen en de kleuren van de Rubik s Cube in kan scannen. Als laatste hebben we ook nog een infraroodsensor gemonteerd op de robot, die de afstand tot de Rubik s Cube kan bepalen. We sluiten de motor van het bakje aan op output A; de motor van de grijparm aan op output B en de motor van de kleuren sensor aan op output C. Daarnaast wordt de kleurensensor aangesloten aan input 1 en de infraroodsensor zelf wordt aangesloten aan input 2. 1
2 Alogritme Doordat de keuze is gevallen op een Rubik s Cube oplossende robot, moest er een een representatie gemaakt worden van een kubus. Doordat nog niet duidelijk was welke taal toepasbaar was op de Mindstorm Brick is het concept op papier gezet in Java omdat we daar het meeste ervaring mee hebben en omdat dit redelijk eenvoudig te schrijven valt. Voor de kubusrepresentatie is gekozen voor een lijst met daarin zes lijsten, elk voor een kant van de kubus. Deze zes lijsten bevatten allemaal 9 elementen, de vlakjes van een kant van de kubus. Voor de elementen gebruiken we integers, 1 voor blauw, 2 voor oranje, 3 voor wit, 4 voor rood, 5 voor groen, en 6 voor geel. Het einddoel van de kubus is om in elk van de zes lijsten in zijn geheel gevuld is met hetzelfde element. Dus één lijst met zes 1 en, één lijst met slechts 2 en, enz. Dag 2 Errors Java Gezien er op de EV3 brick een andere JDK functioneel was dan op de laptop waarmee er op dat moment gewerkt werd, was er een onverwachte error. Dit is verholpen door de JDK waarmee op de laptop gewerkt werd terug te draaien van 1.8 naar 1.7. Toen deze laatste error verholpen was, bleek de connectie tussen de laptop en brick goed te werken en de verschillende testen met het LCD scherm en de speaker van de brick waren succesvol. Het volgende probleem kwam naar voren zodra er geprobeerd werd met de motoren of sensoren te communiceren.de error vertelde ons dat de gevraagde port niet geopend kon worden. Deze error hebben wij niet kunnen verhelpen. Er is hiervoor hulp gezocht, zonder resultaat. Aan het eind van de dag zijn we tot de conclusie gekomen dat Java niet werkte voor wat wij wilde doen. Daarom besloten we de volgende dag te beginnen aan het programmeren in MatLab. Algoritme Gekozen is om de bewegingen die de machine kan maken te hardcoden waarbij letterlijke vertalingen van Fridrichs F2L (Rubik s Cube oplosmethode) algoritmes in Java zijn gezet. Dit kostte behoorlijk wat tijd en inspanning (7 pagina s voor slechts het eerste vlak). Dag 3 MatLab We zijn begonnen met werken in MatLab omdat Java niet bleek te werken. We hebben verbinding gemaakt met de Mindstorm EV3 door hem aan te sluiten via de USB-port. We misten namelijk een onderdeel om hem via wifi te verbinden. Nadat we de connectie hadden getest zijn we begonnen een functie te schijven waardoor de motor waarop het bakje is aangesloten gaat draaien. Deze daaiing moet echter steeds 90 graden verschillen van een uitgangsstand. Het bakje moet dus 90, 180 of 270 graden kunnen draaien. Doordat er echter tandwielen aan de motor verbonden zijn moet de draaiing van de motor groter zijn dan 90 graden. Om het bakje 90 graden te draaien moet de motor dus een grotere rotatie maken. We hebben naar aanleiding van de tandwielen uitgerekend dat om het bakje 90 graden te draaien een 3 keer zo grote rotatie van de motor nodig is. De motor draait uiteindelijk dus 3*90 graden om het bakje één slag linksom te draaien. Toen we dit testte bleek het bakje verder te draaien dan gepland. Dit komt natuurlijk doordat de motor snelheid krijgt en wanneer de hoek bereikt is, draait de motor nog een beetje door. Om dit op te lossen hebben we een functie geschreven (turnleft) die werkt alsvolgt: De rotatie wordt meegegeven aan de functie. Zo lang de hoek nog niet bereikt is, draait het bakje door. Als de hoek bereikt is en de motor gestopt is, wordt uitgerekend hoeveel de motor te ver heeft doorgedraaid. De rotatie die gemaakt is door de motor wordt opgevraagd en het overschot wordt omgezet in een terugdraaiing. Als de snelheid van de rotatie groot is, is de overschot groot. Als er een kleine hoek gemaakt moet worden, zal er dus veel overschot zijn. Om dit te verhelpen hebben we de snelheid van de draaiing variabel gemaakt. Wanneer er een grote rotatie moet plaatsvinden zal de snelheid groter zijn dan wanneer er een kleine rotatie moet plaatvinden. (Deze methode is later toegepast op alle motoren, omdat alle motoren hetzelfde probleem hebben). Zodoende wordt bijna exact over de hoek die meegegeven wordt gedraaid. We draaien absoluut ten opzichte van het nul punt, want zo blijft het nul punt vaststaan. We 2
3 willen namelijk niet dat een kleine afwijking steeds wordt meegerekend in het berekenen van de volgende hoek. De volgende functies die we hebben geschreven zijn voor de grijparm. De eerste functie van de grijparm (rolcube) zorgt ervoor dat de Rubik s Cube in zijn geheel kan kantelen. Deze functie is een kopie van de functie die het bakje laat draaien. De hoek die wordt meegegeven is echter van kleinere waarde, namelijk 200 graden. Dit komt doordat deze motor niet geheel om zijn as kan draaien. Verder moet deze grijparm na elke beweging weer terug naar zijn originele stand. Hierom wordt de functie voor het draaien twee maal aangeroepen. Een keer een draaiing tegen de klok in, en daarna dezelfde rotatie met de klok mee. De tweede functie voor de grijparm (grabcube) zorgt ervoor dat de Rubik s Cube op zijn plek gehouden wordt. Vervolgens moet het bakje gaan draaien waardoor de onderste laag van de kubus wordt gedraaid. De functie voor de grijparm moet dus hoek maken waardoor de arm de kubus in een greep houdt. Hiervoor hebben we geen berekening kunnen bedenken, maar na een paar keer proberen zijn we op een hoek van 90 graden gekomen. De motor van de arm wordt op dat punt stil gezet. De kleurensensor die aangesloten is op de input-port 2 bleek niet goed te werken voor de Rubik s Cube die wij gebruikten. We hebben geprobeerd de lichtintensiteit te beïnvloeden waardoor de kleuren beter herkenbaar zouden zijn. Dit gaf echter geen resultaat. We hebben aan een medestudent gevraagd of zij andere Rubik s Cubes had, die we zouden kunnen testen. Zij zou ze de volgende dag voor ons meebrengen. Java runnen in MatLab Er is op meerdere manieren geprobeerd Java klasses in MatLab te runnen, zowel door de.class files aan het classpath.txt betand te voegen als door de.jar files in het pad van matlab te zetten. Beide methoden bleken niet te werken gezien er geen object aangemaakt kon worden van de geimporteerde klassen. Dus we hebben besloten om alles in MatLab te schrijven. Algoritme In plaats van F2L (de menselijke tactiek) te gebruiken, hebben we besloten over te stappen op een depth-first search systeem. Om dat mogelijk te maken hebben we alle bewegingen die de machine kan maken om moeten zetten naar mogelijke state-veranderingen. De kubus kan bijvoorbeeld 1, 2 of 3 maal om zijn x-as draaien, 1, 2 of 3 maal om zijn y-as draaien, en er kan slechts 1 laag 1, 2 of 3 maal om zijn y-as gedraaid worden. Dit hebben we uitgewerkt op papier. Daarnaast zijn al deze state-veranderingen vertaald naar Java functies die de representatie correct aanpassen door de elementen of lijsten van index te veranderen. Nu moeten we nog een werkend depth-first zoekalgoritme creëeren dat deze states kan lezen en probeert naar het einddoel te bewegen. Dag 4 MatLab De Rubik s Cubes die wij deze dag tot onze beschikking hadden hebben we getest. Er kwam uiteindelijk één kubus uit die alle kleuren juist aangaf, behalve de kleur oranje. Dit komt omdat oranje niet wordt herkend door de kleurensensor. Omdat het teveel tijd zou kosten dit in de kleurensensor aan te passen hebben we ervoor gekozen zwarte stickers op de oranje vlakjes te plakken. Zwart wordt namelijk wel herkend door de kleurensensor. Zo hebben we uiteindelijk zes verschillende kleuren die we kunnen gebruiken in het algoritme. De functies voor de grijparm werkte nog niet optimaal. We hebben de snelheid van de terugrotatie na het grijpen aangepast. Wanneer de snelheid namelijk hoger is, is de kans op vastlopen kleiner. Hierdoor maakt de grijparm een soepelere beweging. Wat bleek was dat de motor van de grijparm niet stopte nadat de arm was tergugedraaid. Dit hebben we ook kunnen aanpassen door de functie een vaste hoek mee te geven en wanneer de rotatie groter is dan die hoek, stopt de motor. 3
4 Het inscannen van de kleuren kan alleen als de kleurensensor loodrecht op het goede vlakje van de Rubik s Cube staat. Hiervoor moest de motor die deze kleurensensor bestuurt de goede hoek maken. We hebben een functie geschreven die de verschillende standen van de motor kan uitvoeren (readcolor). Ook deze rotaties zijn absoluut. We hebben een functie geschreven (scancolors) die een vlak van de Rubik s Cube inscant. De kleurenscanner beweegt naar het midden van de kubus toe. Daar scant het de kleur van het middelste vlakje. Daarna beweegt de sensor een klein beetje terug, waardoor het boven het dichtstijzijnde vlakje staat. Deze kleur wordt dan ook gescand. Vervolgens draait het bakje steeds 45 graden naar links en wordt elke volgende kleur gescand. Echter bleek dat de kleurensensor niet altijd de juiste kleur scant. De oorzak hiervoor was dat het bakje niet precies om het middelpunt draait.we hebben nog eens naar de constructie gekeken. De pin van de motor bleek niet in het midden van het bakje te blijven. Het was niet stevig genoeg in elkaar gezet, waardoor het midden verschoof. We hebben dit opgelost door de constructie te verstevigen waardoor het draaipunt perfect in het midden bleef. Hierdoor kan de kleurensensor de vlakjes van de Rubik s Cube beter inscannen. We hebben vervolgens de functie scancolors uitgebreid waardoor de hele Rubik s Cube wordt ingescand. De scanner beweegt naar het middelpunt en scant eerst een heel vlak. Vervolgens wordt door de grijparm de kubus een kwartslag gedraaid. Daarna scant de kleurenscanner weer het hele vlak. Dit wordt twee keer herhaald. Vervolgens wordt de kubus 90 graden gedraaid en gekanteld. Dan wordt dat vlak weer gescand. Voor het laatste vlak wordt de kubus twee keer gekanteld en wederom het vlak ingescand. Alles gaat ten stotte terug naar de beginpositie. Na ons moment van euforie bleek echter dat de motor van de kleurenscanner niet meer goed naar boven het middelste vlakje van de kubus wilde bewegen. Dit is voor ons nog altijd een raadsel, aangezien we niks in de code veranderd hebben en het hiervoor wel gewoon werkte. Ook hebben we twee functies geschreven om een lijst met kleuren om te zetten naar een lijst van de bebehorende int s. Deze functies zijn switchcolor en forloop, de laatste is helaas nooit gebruikt omdat het handiger bleek te zijn om switchcolor direct aan te roepen vanuit scancolor. Algoritme We hebben veel tijd besteed aan het werkend krijgen van Java in MatLab. Dat is niet gelukt waardoor we gekozen hebben om de functies voor de representatie van de kubus in MatLab te schrijven. In plaats van zes lijsten in een lijst is er geopteerd voor een matrix van 6 x 9, 6 zijdes met elk 9 vakjes. Daarna zijn er vier verschillende soorten functies geschreven die de representatie van de kubus correct aanpassen gebaseerd op de bewegingen die de robot kan maken. 1. flipcube(twice/thrice) Deze functie komt overeen met de kubus één of meerdere keren een kwartslag om zijn x-as te draaien. Kan maar één kant op dus vandaar een driedubbele move in plaats van één tegen de klok in. De volgorde van de kolommen wordt hier aangepast. Kolommen wisselen van plek door te roteren met de klok mee. 2. turncube(twice/counter) Deze functie komt overeen met de kubus één of twee keer om zijn y-as te draaien. Counter draait de kubus tegen de klok in. De volgorde van de kolommen wordt hier aangepast. Kolommen wisselen van plek door te roteren met de klok mee. 3. turnside(twice/counter) Deze functie is hetzelfde als turncube, alleen dan voor slechts de onderste laag in plaats van de hele kubus. Subkolommen van 3 elementen worden hier gewisseld met elkaar. 4. orderside(counter) Deze functie draait een zijde met de klok mee of tegen de klok in. Nodig voor de zijkanten bij flipcube of de boven en onderkant bij turncube en turnside. Het verwisselt elementen in een kolom met elkaar. 4
5 Om de kleuren te representeren is gekozen voor integers en om te testen is een testcube opgebouwd in opgeloste staat waar de functies op losgelaten zijn. Ze lijken perfect te werken. Nu is het nog nodig om de kleurenscanner de integers in de lijst in te vullen en om een zoekalgoritme in Matlab te schrijven. Dag 5 MatLab De motor van de kleurensensor werkte nog steeds niet optimaal. We hebben hier weer naar gekeken, zonder resultaat. We hebben een paar aanpassingen geprobeerd, zoals een grotere snelheid wanneer er over een kleine hoek wordt gedraaid. We dachten namelijk dat de motor een te kleine hoek moest maken en daar moeite mee had. Dit bleek niet zo te zijn. Verder zou het kunnen liggen aan het feit dat de motor zichzelf steeds corrigeert en daar nooit mee stopt. Dit is echter uitgesloten, want dan zou het geval zijn dat de motor kleine bewegingen maakt. De motor maakte echter geen beweging meer. De grijparm bleek niet elke keer de kubus goed om te gooien. De hoek die gemaakt werd, was te groot. Daardoor schoof de arm van de kubus af en schoof hem op dezelfde kant weer terug tijdens de terugdraaiing. Dit hebben we opgelost door de hoek die de grijparm maakt kleiner te maken, namelijk 190 graden in plaats van 200. Vanwege het tijdsgebrek is het niet gelukt het algoritme te implementeren. In plaats hiervan hebben we een code geschreven die uitgaat van een opgeloste Rubik s Cube en daar een patroon van een bloem in maakt. De bewegingen die gemaakt moeten worden zijn gehardcoded met de eerder gemaakte functies. De kleuren die gescand werden door de kleurensensor moesten nog in een cellarray gezet worden. We hebben de functie scancolors uitgebreid. De functie roept switchcolor aan, waardoor de naam van de kleur wordt omgezet in een cijfer tussen 1 en 6. Deze cijfers worden vervolgens in de array gezet. Zo krijgen we een matrix van 6 bij 9. Na het inscannen staan deze cijfers echter nog niet op de juiste plek met betrekking tot de representatie van de kubus die gebruikt wordt voor het algoritme. Daarvoor is de functie neworder gemaakt. Deze zet de cijfers die worden ingescand op de juiste plek voor de representatie. Algoritme Nu de representatie van de kubus in Matlab werkte hebben we geprobeerd om een A*-algoritme te schrijven dat als beginpunt de kubus gebruikt die wordt ingelezen door de kleurensensor en als doel een opgeloste kubus. Doordat er niet veel tijd over was tot de presentatie hebben we ervoor gekozen om slechts één kant, de witte, op te lossen. Voor A* is het nodig om waardes aan de states te geven, die hebben we gemaakt aan de hand van de amountofwhite(kubus) functie. Deze functie zoekt in de ingelezen kubus naar de kolom waar het vijfde element wit is. Het vijfde element is namelijk het middelste vakje van een kubuszijde en kan niet van positie ten opzichte van de andere blokjes veranderen. Daarom moet er om die vakje heen worden gebouwd. Daarna wordt het aantal witte vlakjes in deze kolom geteld wat vergeleken wordt met de doelwaarde 9 (een volledig gekleurde kant). Hoe hoger de waarde die uit de amountofwhite functie komt, hoe beter dus. Deze functie wordt dan aangeroepen na elke mogelijke stateverandering (de functies van de vorige dag) en de waarde zou moeten toegekend worden aan elke stateverandering waardoor de best mogelijke zet gekozen kan worden. Nu was het nog de zaak om de kosten van gemaakte zetten mee te rekenen in de waarde van een zet en om de stateveranderingen te koppelen aan bewegingen van de robot. Hier hebben we helaas geen tijd meer voor gehad voor onze presentatie. Discussie Het project was een grote uitdaging voor de tijd die we ervoor hadden. We zijn tot de conclusie gekomen dat er veel standaard afwijkingen zitten in de motoren van de robot. Wat verder jammer is, is dat het bakje net groter is dan de Rubik s Cube zelf. Dit is nodig om de kubus om te rollen, maar dit zorgt er 5


6 ook voor dat wanneer de onderste laag gedraaid wordt, de kubus soms niet netjes uitgelijnd wordt. We zijn erachter gekomen dat het mogelijk is een Rubik s Cube solver te maken in MatLab, maar dit vergt echter meer tijd. Een vervolg stap zou dan ook zijn het A* algoritme toe te passen die de combinatie maakt met de representaties die wij geschreven hebben en de functies van de robot. We hebben van dit project geleerd hoe we programmeren in MatLab en dat de koppeling naar de robot heel nauwkeurig bepaald moet worden en hoe een Rubik s Cube moet opgelost worden (slechts één van ons had de vaardigheden dit te doen). Appendix Dit project werkte met Mindstorms EV3 en werd geprogrammeerd in MatLab. Bouwinstructies waar wij onze robot op gebaseerd hebben: Het algoritme van Fridrich: Link naar gezipte file met alle functies voor Ruby: Het filmpje voor het inscannen van de vlakken: Het filmpje voor het maken van een bloempatroon: 6



7 Afbeeldingen van verschillende standen van de robot, ter verduidelijking: 7



8 8
g. Je kan nu door op de play knop te drukken je programma versturen naar de EV3 brick waarna het zal uitgevoerd worden.
 EV3 brick verbinden via bluetooth. 1) Alvorens de LEGO software op te starten kijk je het best of bluetooth op je PC is geactiveerd. Vooral bij laptops schakelt men deze functie vaak uit om batterij te
EV3 brick verbinden via bluetooth. 1) Alvorens de LEGO software op te starten kijk je het best of bluetooth op je PC is geactiveerd. Vooral bij laptops schakelt men deze functie vaak uit om batterij te
Workshop FLL. Leer robots programmeren. Marieke Peelen Lennart de Graaf Daryo Verouden -
 Workshop FLL Leer robots programmeren Marieke Peelen Lennart de Graaf Daryo Verouden - 1 Student-coaches 2 FIRST LEGO League 3 FLL Core values We zijn een team We doen zelf het werk met hulp van onze coaches.
Workshop FLL Leer robots programmeren Marieke Peelen Lennart de Graaf Daryo Verouden - 1 Student-coaches 2 FIRST LEGO League 3 FLL Core values We zijn een team We doen zelf het werk met hulp van onze coaches.
TIPS: PAG. 3 DES CONSEILS: PAGE 16 HINWEISE: SEITE 29
 TIPS: PAG. 3 DES CONSEILS: PAGE 16 HINWEISE: SEITE 29 00728 NL MILJARDEN COMBINATIES, EN MAAR ÉÉN OPLOSSING. Rubik s Cube is een verschrikkelijk verslavende, meerdimensionale uitdaging die puzzelfanaten
TIPS: PAG. 3 DES CONSEILS: PAGE 16 HINWEISE: SEITE 29 00728 NL MILJARDEN COMBINATIES, EN MAAR ÉÉN OPLOSSING. Rubik s Cube is een verschrikkelijk verslavende, meerdimensionale uitdaging die puzzelfanaten
De algemeen gebruikte notatie:
 Makkelijke oplossing voor Rubik's Kubus Deze oplossing vergt niet zoveel leeswerk. Kijk bij elke stap wat het doel is, en welke algoritmes er gebruikt worden om dat doel te bereiken. Soms moet je een algoritme
Makkelijke oplossing voor Rubik's Kubus Deze oplossing vergt niet zoveel leeswerk. Kijk bij elke stap wat het doel is, en welke algoritmes er gebruikt worden om dat doel te bereiken. Soms moet je een algoritme
Programmeren met lego mindstorms.
 Programmeren met lego mindstorms. Servo-motoren: zorgen voor de beweging van de wielen. Kleine motor: kan een hendel op en neer laten bewegen. Infraroodsensor: kan afstanden meten en vergelijken. EV3-blok:
Programmeren met lego mindstorms. Servo-motoren: zorgen voor de beweging van de wielen. Kleine motor: kan een hendel op en neer laten bewegen. Infraroodsensor: kan afstanden meten en vergelijken. EV3-blok:
Ziet uw kubus er op dit moment niet zo uit? Maar wilt u hem wel zo krijgen? Dan zit u hier goed!
 Ziet uw kubus er op dit moment niet zo uit? Maar wilt u hem wel zo krijgen? Dan zit u hier goed! Stap voor stap uitgelegd hoe u uw kubus van Rubik weer goed krijgt. Orginele versie http://rubik.tormentil.nl/
Ziet uw kubus er op dit moment niet zo uit? Maar wilt u hem wel zo krijgen? Dan zit u hier goed! Stap voor stap uitgelegd hoe u uw kubus van Rubik weer goed krijgt. Orginele versie http://rubik.tormentil.nl/
Revenge De ultieme uitdaging 2. Even voorstellen: Revenge 3. Algemene tips 8. Draaipatronen bij Revenge 19. Oplossen van Rubik s Revenge 28
 Rubik s Revenge Revenge De ultieme uitdaging 2 Even voorstellen: Revenge 3 Draaitips 5 Algemene tips 8 Notatiesysteem 12 Draaipatronen bij Revenge 19 Oplossen van Rubik s Revenge 28 Er is meer Revenge
Rubik s Revenge Revenge De ultieme uitdaging 2 Even voorstellen: Revenge 3 Draaitips 5 Algemene tips 8 Notatiesysteem 12 Draaipatronen bij Revenge 19 Oplossen van Rubik s Revenge 28 Er is meer Revenge
Mindstorms-Ev3 Robot
 Oefening 1: bouw de robot zie het boekje Mindstorms-Ev3 Robot blz. 4 tot blz. 38 blz. 42 tot blz. 46 blz. 54 tot blz. 67 blz. 69 tot blz. 71 blz. 77 tot blz. 79 Geen gyroscoop (blz. 48) sensor bouwen en
Oefening 1: bouw de robot zie het boekje Mindstorms-Ev3 Robot blz. 4 tot blz. 38 blz. 42 tot blz. 46 blz. 54 tot blz. 67 blz. 69 tot blz. 71 blz. 77 tot blz. 79 Geen gyroscoop (blz. 48) sensor bouwen en
Van A naar B. Hoe je een auto maakt met DC-motoren en je het kunt programmeren door. de tijd, snelheid en afstand te meten! Naam. Je leert...
 Van A naar B Je leert... Hoe je een auto maakt met DC-motoren en je het kunt programmeren door de tijd, snelheid en afstand te meten! Naam Je hebt nodig Studuino x 1 Batterijhouder x 1 DC Motor x 2 USB
Van A naar B Je leert... Hoe je een auto maakt met DC-motoren en je het kunt programmeren door de tijd, snelheid en afstand te meten! Naam Je hebt nodig Studuino x 1 Batterijhouder x 1 DC Motor x 2 USB
Space Invaders op de micro:bit
 Space Invaders op de micro:bit Op het eerste gezicht denk je misschien dat je met een scherm van vijf bij vijf ledjes niet zoveel kunt doen, maar dat valt best nog wel mee. Om dat aan te tonen gaan we
Space Invaders op de micro:bit Op het eerste gezicht denk je misschien dat je met een scherm van vijf bij vijf ledjes niet zoveel kunt doen, maar dat valt best nog wel mee. Om dat aan te tonen gaan we
Uitleg. Welkom bij de Beverwedstrijd 2006. Je krijgt 15 vragen, die je in maximaal 45 minuten moet beantwoorden.
 Uitleg Welkom bij de Beverwedstrijd 2006 Je krijgt 15 vragen, die je in maximaal 45 minuten moet beantwoorden. Je krijgt 5 vragen van niveau A, 5 vragen van niveau B en 5 vragen van niveau C. Wij denken
Uitleg Welkom bij de Beverwedstrijd 2006 Je krijgt 15 vragen, die je in maximaal 45 minuten moet beantwoorden. Je krijgt 5 vragen van niveau A, 5 vragen van niveau B en 5 vragen van niveau C. Wij denken
Antwoorden. Magische vierkanten Vierkant voor Wiskunde Doeboek 8
 Antwoorden Magische vierkanten Vierkant voor Wiskunde Doeboek 8 1 6 1 8 7 5 3 2 9 4 2 De getallen 1 tot en met 9. 3 15. 15 en 15. De som van de getallen van elke rij is 15. 4 15. De som van de getallen
Antwoorden Magische vierkanten Vierkant voor Wiskunde Doeboek 8 1 6 1 8 7 5 3 2 9 4 2 De getallen 1 tot en met 9. 3 15. 15 en 15. De som van de getallen van elke rij is 15. 4 15. De som van de getallen
SPELREGELS FRITZO BEGINNER
 SPELREGELS Een nieuwe generatie Leer- en familie spel Vijf spelvarianten met veel afwisseling en spannende uitdagingen, om alleen of in een groep te spelen. Liefhebbers van moeilijke denkspellen kunnen
SPELREGELS Een nieuwe generatie Leer- en familie spel Vijf spelvarianten met veel afwisseling en spannende uitdagingen, om alleen of in een groep te spelen. Liefhebbers van moeilijke denkspellen kunnen
PSD Turtle. Om op een goede manier een programma te schrijven wordt er ook een algoritme gevolgd. Dit algoritme bestaat uit de volgende stappen/fasen:
 Inleiding Small Basic is een gratis versie van de programmeertaal BASIC wat staat voor Beginner All-purpose Symbolic Instruction Code. Een computer taal die vooral in de beginjaren zeer populair was onder
Inleiding Small Basic is een gratis versie van de programmeertaal BASIC wat staat voor Beginner All-purpose Symbolic Instruction Code. Een computer taal die vooral in de beginjaren zeer populair was onder
BLOCKLY VISUEEL PROGRAMMEREN LEVEL 2
 VISUEEL PROGRAMMEREN LEVEL 2 BLOCKLY Samenvatting Blockly lijkt veel op Ko de Kraker. Het eerste gedeelte zal dan ook makkelijk zijn voor de kinderen die geen moeite hadden met Ko de Kraker. Langzamerhand
VISUEEL PROGRAMMEREN LEVEL 2 BLOCKLY Samenvatting Blockly lijkt veel op Ko de Kraker. Het eerste gedeelte zal dan ook makkelijk zijn voor de kinderen die geen moeite hadden met Ko de Kraker. Langzamerhand
Zo gaat jouw kunstwerk er straks uitzien. Of misschien wel heel anders.
 Spirograaf in Python Een kunstwerk maken Met programmeren kun je alles maken! Ook een kunstwerk! In deze les maken we zelf een kunstwerk met Python. Hiervoor zal je werken met herhalingen en variabelen.
Spirograaf in Python Een kunstwerk maken Met programmeren kun je alles maken! Ook een kunstwerk! In deze les maken we zelf een kunstwerk met Python. Hiervoor zal je werken met herhalingen en variabelen.
Lineaire afbeeldingen
 Les 2 Lineaire afbeeldingen Als een robot bij de robocup (het voetbaltoernooi voor robots een doelpunt wil maken moet hij eerst in de goede positie komen, d.w.z. geschikt achter de bal staan. Hiervoor
Les 2 Lineaire afbeeldingen Als een robot bij de robocup (het voetbaltoernooi voor robots een doelpunt wil maken moet hij eerst in de goede positie komen, d.w.z. geschikt achter de bal staan. Hiervoor
Meer Blokken. 1. Dit is een functie genaamd Maximum, die twee argumenten heeft: number1 en number2.
 Meer Blokken Voorkennis: SuperDojo, Snake Leerdoelen: Meer Blokken Introductie Meer Blokken zijn Scratch s manier van functies. Functies zijn een heel belangrijk concept in alle programmeertalen. Het staat
Meer Blokken Voorkennis: SuperDojo, Snake Leerdoelen: Meer Blokken Introductie Meer Blokken zijn Scratch s manier van functies. Functies zijn een heel belangrijk concept in alle programmeertalen. Het staat
Magidoku s en verborgen symmetrieën
 Uitwerking Puzzel 92-6 Magidoku s en verborgen symmetrieën Wobien Doyer Lieke de Rooij Een Latijns vierkant van orde n, is een vierkante matrix, gevuld met n verschillende symbolen waarvan elk precies
Uitwerking Puzzel 92-6 Magidoku s en verborgen symmetrieën Wobien Doyer Lieke de Rooij Een Latijns vierkant van orde n, is een vierkante matrix, gevuld met n verschillende symbolen waarvan elk precies
Competenties semester 4
 Competenties semester 4 Richard Van Richard Van Gegevens Student Naam: Richard Van Studentnummer: 16073525 Klas: WH23 School: De Haagse Hogeschool Opleiding: Werktuigbouwkunde Adres: Rotterdamseweg 137,
Competenties semester 4 Richard Van Richard Van Gegevens Student Naam: Richard Van Studentnummer: 16073525 Klas: WH23 School: De Haagse Hogeschool Opleiding: Werktuigbouwkunde Adres: Rotterdamseweg 137,
Morenaments Ornamenten met symmetrie. Werkblad vooraf met begeleidende tekst en oplossingen
 Morenaments Ornamenten met symmetrie Fien Aelter, Liesje Knaepen en Kristien Vanhuyse, studenten SLO wiskunde KU Leuven Werkblad vooraf met begeleidende tekst en oplossingen Dit werklad is een voorbereiding
Morenaments Ornamenten met symmetrie Fien Aelter, Liesje Knaepen en Kristien Vanhuyse, studenten SLO wiskunde KU Leuven Werkblad vooraf met begeleidende tekst en oplossingen Dit werklad is een voorbereiding
Samenvatting. Context. Doelstellingen. Vaardigheden computationeel denken. Katholiek onderwijs. Gemeenschapsonderwijs
 Music componist Samenvatting Leeftijd 10-12 jaar Vaardigheden algoritme en procedure decompositie van het probleem voorspellen Totale tijdsduur 150 minuten De leerlingen ontdekken hoe ze een liedje kunnen
Music componist Samenvatting Leeftijd 10-12 jaar Vaardigheden algoritme en procedure decompositie van het probleem voorspellen Totale tijdsduur 150 minuten De leerlingen ontdekken hoe ze een liedje kunnen
Missie #1 : Maak een halve draai. 3. Kijk of de status op 'Aantal rotaties Aan' staat 4. Verander de waarde van 'Aantal rotaties' naar 5
 Lego Mindstorms Missie #1 : Maak een halve draai Doel : De robot beweegt naar voren, maakt een halve draai (180 graden) en beweegt dan weer terug naar dezelfde plek als waar hij begon. 1. Voeg een nieuw
Lego Mindstorms Missie #1 : Maak een halve draai Doel : De robot beweegt naar voren, maakt een halve draai (180 graden) en beweegt dan weer terug naar dezelfde plek als waar hij begon. 1. Voeg een nieuw
Uitleg: In de bovenstaande oefening zie je in het eerste blokje een LEES en een SCHRIJF opdracht. Dit is nog lesstof uit het tweede trimester.
 In onderstaande oefeningen zijn kleuren gebruikt. Deze dienen aleen om de structuren makkelijker terug te kunnen herkennen. Ze worden niet standaard zo gebruikt. De dunne rood/roze balken zijn ook geen
In onderstaande oefeningen zijn kleuren gebruikt. Deze dienen aleen om de structuren makkelijker terug te kunnen herkennen. Ze worden niet standaard zo gebruikt. De dunne rood/roze balken zijn ook geen
Maqueen. robot. MAQUEEN: EENVOUDIG PROGRAMMEERBARE ROBOT VOOR STEM (Science Technology Engineering Mathematics) ONDERWIJS MET DE MICRO:BIT.
 ONDERWIJS MET DE MICRO:BIT.") Lees meer over de maqueen extentie 3 Maak je eigen code voor de robot 7 Programmeer je eigen gamepad 13 Maqueen MAQUEEN: EENVOUDIG PROGRAMMEERBARE ROBOT VOOR STEM (Science Technology Engineering Mathematics)
Lees meer over de maqueen extentie 3 Maak je eigen code voor de robot 7 Programmeer je eigen gamepad 13 Maqueen MAQUEEN: EENVOUDIG PROGRAMMEERBARE ROBOT VOOR STEM (Science Technology Engineering Mathematics)
Level ① Van A naar B Je leert...
 Robot Programming Class Level 2 Van A naar B Je leert... Hoe je een auto maakt met DC-motoren en je het kunt programmeren door de tijd, snelheid en afstand te meten! Naam Wat heb je nodig Studuino x Batterijhouder
Robot Programming Class Level 2 Van A naar B Je leert... Hoe je een auto maakt met DC-motoren en je het kunt programmeren door de tijd, snelheid en afstand te meten! Naam Wat heb je nodig Studuino x Batterijhouder
Aan de slag met LEGO Mindstorms in STEM. Dennis Van Landeghem Educatief medewerker. dennis@technopolis.be www.technopolis.be
 1 Aan de slag met LEGO Mindstorms in STEM Dennis Van Landeghem Educatief medewerker dennis@technopolis.be www.technopolis.be 2 Aan de slag met LEGO Mindstorms in STEM 3 Welkom LEGO EV3 training en gebruik
1 Aan de slag met LEGO Mindstorms in STEM Dennis Van Landeghem Educatief medewerker dennis@technopolis.be www.technopolis.be 2 Aan de slag met LEGO Mindstorms in STEM 3 Welkom LEGO EV3 training en gebruik
Het automatisch wagentje.
 Het automatisch wagentje. Het automatiseren van machines zorgt ervoor dat het werk van de mensen gemakkelijker wordt. Het lastige werk, het vuile werk, het voortdurend herhalende werk dit kan allemaal
Het automatisch wagentje. Het automatiseren van machines zorgt ervoor dat het werk van de mensen gemakkelijker wordt. Het lastige werk, het vuile werk, het voortdurend herhalende werk dit kan allemaal
HOOFDSTUK 2 TRANSFORMATIES
 HOOFDSTUK 2 TRANSFORMATIES Verschuiven, roteren, spiegelen, vergroten/verkleinen zijn manieren om bij een figuur een 'beeldfiguur' te bepalen. Deze manieren noem je 'transformaties'. 2.1 LIJNSPIEGELING
HOOFDSTUK 2 TRANSFORMATIES Verschuiven, roteren, spiegelen, vergroten/verkleinen zijn manieren om bij een figuur een 'beeldfiguur' te bepalen. Deze manieren noem je 'transformaties'. 2.1 LIJNSPIEGELING
SketchUp: 3D voor iedereen (/)
") 1 DE CURSUS (/) SKETCHUP? (/SKETCHUP.HTML) INSTALLATIE (/INSTALLATIE.HTML) DE BASIS (/DE-BASIS.HTML) GEREEDSCHAPPEN (/GEREEDSCHAPPEN.HTML) GEAVANCEERD (/GEAVANCEERD.HTML) SketchUp: 3D voor iedereen (/)
1 DE CURSUS (/) SKETCHUP? (/SKETCHUP.HTML) INSTALLATIE (/INSTALLATIE.HTML) DE BASIS (/DE-BASIS.HTML) GEREEDSCHAPPEN (/GEREEDSCHAPPEN.HTML) GEAVANCEERD (/GEAVANCEERD.HTML) SketchUp: 3D voor iedereen (/)
Rapportage Trillingsmeetrapport <klant> <installatie> <datum>
 Dit document is een geanonimiseerd trillingsmeetrapport uit de praktijk. Rapportage Trillingsmeetrapport Istec referentie Opdrachtgever ref Aanvang
Dit document is een geanonimiseerd trillingsmeetrapport uit de praktijk. Rapportage Trillingsmeetrapport Istec referentie Opdrachtgever ref Aanvang
Naam: Klas: Docent: Datum: Module: Naam opdracht:
 ITTT Designdocument Naam: Thomas Meiborg Klas: G&I 1C Docent: Edwin van Ouwekerk Moria Datum: 18 januari 2016 Module: If This Then That Naam opdracht: Designdocument Proces: De eerste twee weken van dit
ITTT Designdocument Naam: Thomas Meiborg Klas: G&I 1C Docent: Edwin van Ouwekerk Moria Datum: 18 januari 2016 Module: If This Then That Naam opdracht: Designdocument Proces: De eerste twee weken van dit
Logo. De schildpad. Hoofdstuk 8 Grafische afbeeldingen met een schildpad
 Hoofdstuk 8 Grafische afbeeldingen met een schildpad Logo In de jaren 70 was er een eenvoudige, maar krachtige programmeertaal met de naam Logo die werd gebruikt door een klein aantal onderzoekers. Totdat
Hoofdstuk 8 Grafische afbeeldingen met een schildpad Logo In de jaren 70 was er een eenvoudige, maar krachtige programmeertaal met de naam Logo die werd gebruikt door een klein aantal onderzoekers. Totdat
De Leidsche Flesch Studievereniging voor Natuurkunde, Sterrenkunde, Wiskunde en Informatica sinds DLF Pointerworkshop
 DLF Pointerworkshop Opgaven 2 maart 2016 XKCD # 371 In dit document staan een aantal oude tentamenopgaven om te oefenen voor het hertentamen PR Bij de selectie is rekening gehouden met de opgaven die het
DLF Pointerworkshop Opgaven 2 maart 2016 XKCD # 371 In dit document staan een aantal oude tentamenopgaven om te oefenen voor het hertentamen PR Bij de selectie is rekening gehouden met de opgaven die het
Fabsheet: Vinylsnijder
 Fabsheet: Vinylsnijder Met de vinylsnijder kun je stickers en papier snijden. Het FabLab heeft zelfklevend vinyl op voorraad in diverse kleuren. Zelf folie meenemen kan natuurlijk ook, houd er wel rekening
Fabsheet: Vinylsnijder Met de vinylsnijder kun je stickers en papier snijden. Het FabLab heeft zelfklevend vinyl op voorraad in diverse kleuren. Zelf folie meenemen kan natuurlijk ook, houd er wel rekening
Je kunt de mbot ook draadloos programmeren via Bluetooth of met 2.4G Wireless. Bekijk de instructies op mbot draadloos.
 Wat is een mbot? mbot is een robot die je eerst zelf in elkaar moet zetten en daarna kunt programmeren. De programmeer omgeving die je erbij kan installeren is mblock welke lijkt op Scratch 2.0 : mblock
Wat is een mbot? mbot is een robot die je eerst zelf in elkaar moet zetten en daarna kunt programmeren. De programmeer omgeving die je erbij kan installeren is mblock welke lijkt op Scratch 2.0 : mblock
Het leek ons wel een interessante opdracht, een uitdaging en een leuke aanvulling bij het hoofdstuk.
 Praktische-opdracht door een scholier 2910 woorden 3 mei 2000 5,2 46 keer beoordeeld Vak Wiskunde Wiskunde A1 - Praktische Opdracht Hoofdstuk 2 1. Inleiding We hebben de opdracht gekregen een praktische
Praktische-opdracht door een scholier 2910 woorden 3 mei 2000 5,2 46 keer beoordeeld Vak Wiskunde Wiskunde A1 - Praktische Opdracht Hoofdstuk 2 1. Inleiding We hebben de opdracht gekregen een praktische
STAPPENPLAN COMPETENTIEPROFIELEN MAKEN
 Inhoudsopgave 1 Zelf maken of COLO... 1 2 Opbouw van het competentieprofiel... 1 3 Opbouw van de competentiematrix... 2 4 Competenties... 2 6 Competentiecriteriastatus... 3 7 Competentiestatus... 4 8 Werkprocessen...
Inhoudsopgave 1 Zelf maken of COLO... 1 2 Opbouw van het competentieprofiel... 1 3 Opbouw van de competentiematrix... 2 4 Competenties... 2 6 Competentiecriteriastatus... 3 7 Competentiestatus... 4 8 Werkprocessen...
Het minimale aantal sleutels op niveau h is derhalve
 1 (a) In een B-boom van orde m bevat de wortel minimaal 1 sleutel en maximaal m 1 sleutels De andere knopen bevatten minimaal m 1 sleutels en maximaal m 1 sleutels (b) In een B-boom van orde 5 bevat elke
1 (a) In een B-boom van orde m bevat de wortel minimaal 1 sleutel en maximaal m 1 sleutels De andere knopen bevatten minimaal m 1 sleutels en maximaal m 1 sleutels (b) In een B-boom van orde 5 bevat elke
Practicumopgave 3: SAT-solver
 Practicumopgave 3: SAT-solver Modelleren en Programmeren 2015/2016 Deadline: donderdag 7 januari 2016, 23:59 Introductie In het vak Inleiding Logica is onder andere de propositielogica behandeld. Veel
Practicumopgave 3: SAT-solver Modelleren en Programmeren 2015/2016 Deadline: donderdag 7 januari 2016, 23:59 Introductie In het vak Inleiding Logica is onder andere de propositielogica behandeld. Veel
Algoritmisch Denken: Dodo s Bit Parity
 Algoritmisch Denken: Dodo s Opdrachtomschrijving: Jouw opdracht, als je deze accepteert, is om Mimi (een Dodo) te leren een bit parity fout te ontdekken en te herstellen. Leerdoelen: Ik kan een correct
Algoritmisch Denken: Dodo s Opdrachtomschrijving: Jouw opdracht, als je deze accepteert, is om Mimi (een Dodo) te leren een bit parity fout te ontdekken en te herstellen. Leerdoelen: Ik kan een correct
techniek Motor en as LEGO O P D R A C H T Maak het programma van rechtsboven na, op het open stuk van het scherm.
 Motor en as 1 Maak het programma van rechtsboven na, op het open stuk van het scherm. Sleep het startblokje en motor rechtsom tegen elkaar. Als je een fout maakt, dan kan je een blokje ook weer terugslepen
Motor en as 1 Maak het programma van rechtsboven na, op het open stuk van het scherm. Sleep het startblokje en motor rechtsom tegen elkaar. Als je een fout maakt, dan kan je een blokje ook weer terugslepen
3/3/2013 By Ing. R. Ellis 1
 3/3/2013 By Ing. R. Ellis 1 Basis Programmeren Small basic Turtle 3/3/2013 By Ing. R. Ellis 2 Inleiding Small Basic is freeware software www.smallbasic.com Een object-georiënteerde versie van de taal BASIC
3/3/2013 By Ing. R. Ellis 1 Basis Programmeren Small basic Turtle 3/3/2013 By Ing. R. Ellis 2 Inleiding Small Basic is freeware software www.smallbasic.com Een object-georiënteerde versie van de taal BASIC
NSPYRE LEGO MINDSTORMS UITDAGING (JAVA) INLEIDING. DOEL: SIMULATOR:
 INLEIDING. DOEL: SIMULATOR:") NSPYRE LEGO MINDSTORMS UITDAGING (JAVA) INLEIDING. Door mee te doen aan deze uitdaging kan je Nspyre laten zien wat je kan. Schrijf jij de beste oplossing dan is deze lego mindstorms nxt 2.0 set voor jou.
NSPYRE LEGO MINDSTORMS UITDAGING (JAVA) INLEIDING. Door mee te doen aan deze uitdaging kan je Nspyre laten zien wat je kan. Schrijf jij de beste oplossing dan is deze lego mindstorms nxt 2.0 set voor jou.
icafe Project Joeri Verdeyen Stefaan De Spiegeleer Ben Naim Tanfous
 icafe Project Joeri Verdeyen Stefaan De Spiegeleer Ben Naim Tanfous 2006-2007 Inhoudsopgave 1 2 1.1 Programmeertaal PHP5..................... 2 1.2 MySQL database......................... 3 1.3 Adobe Flash...........................
icafe Project Joeri Verdeyen Stefaan De Spiegeleer Ben Naim Tanfous 2006-2007 Inhoudsopgave 1 2 1.1 Programmeertaal PHP5..................... 2 1.2 MySQL database......................... 3 1.3 Adobe Flash...........................
Autonoom vinden van een object met een quadcopter
 Universiteit van Amsterdam Autonoom vinden van een object met een quadcopter Sebastiaan Joustra (10516999) Joeri Bes (10358234) Joeri Sleegers (10631186) Bram Smit (10666656) 27 juni 2014 1 Abstract Dit
Universiteit van Amsterdam Autonoom vinden van een object met een quadcopter Sebastiaan Joustra (10516999) Joeri Bes (10358234) Joeri Sleegers (10631186) Bram Smit (10666656) 27 juni 2014 1 Abstract Dit
In opdracht van: Keimpe de Heer 29 januari Hazal Ates Iris Haima Hedwig Klamer Jan van Steenbergen
 In opdracht van: Keimpe de Heer 29 januari 2016 Hazal Ates Iris Haima Hedwig Klamer Jan van Steenbergen 1. Inleiding 1 2. Ontwikkeling van het idee 2 3. Prototyping 3 4. Het maken 4 5. Test en conclusie
In opdracht van: Keimpe de Heer 29 januari 2016 Hazal Ates Iris Haima Hedwig Klamer Jan van Steenbergen 1. Inleiding 1 2. Ontwikkeling van het idee 2 3. Prototyping 3 4. Het maken 4 5. Test en conclusie
Informatica: C# WPO 11
 Informatica: C# WPO 11 1. Inhoud Pass by reference (ref, out), recursie, code opdelen in verschillende codebestanden 2. Oefeningen Demo 1: Swapfunctie Demo 2: TryParse(int) Demo 3: Recursion Tree Demo
Informatica: C# WPO 11 1. Inhoud Pass by reference (ref, out), recursie, code opdelen in verschillende codebestanden 2. Oefeningen Demo 1: Swapfunctie Demo 2: TryParse(int) Demo 3: Recursion Tree Demo
Tips & Trucs ARCHICAD 117: Programma van Eisen add-on voor KeyMembers
 Tips & Trucs ARCHICAD 117: Programma van Eisen add-on voor KeyMembers Met de Programma van Eisen add-on kan eenvoudig een programma van eisen worden ingelezen vanuit een excel bestand, waarbij snel zones
Tips & Trucs ARCHICAD 117: Programma van Eisen add-on voor KeyMembers Met de Programma van Eisen add-on kan eenvoudig een programma van eisen worden ingelezen vanuit een excel bestand, waarbij snel zones
Caféplay II Spel - Turnbased strategiespel met alledaagse voorwerpen. Misha Heesakkers 2037969
 Caféplay II Spel - Turnbased strategiespel met alledaagse voorwerpen Misha Heesakkers 2037969 Inhoud Gamedesign 3 Laatste Prototype 4 Procesverslag 5 Protoype 1 6 Protoype 2 7 Protoype 3 8 Protoype 4 9
Caféplay II Spel - Turnbased strategiespel met alledaagse voorwerpen Misha Heesakkers 2037969 Inhoud Gamedesign 3 Laatste Prototype 4 Procesverslag 5 Protoype 1 6 Protoype 2 7 Protoype 3 8 Protoype 4 9
A R D U I N O. addendum bij: Leren programmeren, meten en sturen met de Arduino. 3 e druk INHOUD
 addendum bij: Leren programmeren, meten en sturen met de Arduino 3 e druk A R D INHOUD Errata Aanwijzigen en tips (inclusief errata) Basisset en aanvullingsset U I N O 2 Errata derde druk Pag. 71, afbeelding
addendum bij: Leren programmeren, meten en sturen met de Arduino 3 e druk A R D INHOUD Errata Aanwijzigen en tips (inclusief errata) Basisset en aanvullingsset U I N O 2 Errata derde druk Pag. 71, afbeelding
Introductiekaart Niveau B Installatie software
 echniek Introductiekaart Niveau B Installatie software 0 Installatie programmeer software - eenmalig Stap. Kijk op de computer of de Mindstorms software geïnstalleerd is. Als hij al geïnstalleerd is kan
echniek Introductiekaart Niveau B Installatie software 0 Installatie programmeer software - eenmalig Stap. Kijk op de computer of de Mindstorms software geïnstalleerd is. Als hij al geïnstalleerd is kan
MBLOCK + MBOT. is een project van
 MBLOCK + MBOT INHOUD Inhoud... 2 De mbot aansluiten... 3 Voor je begint... 3 Verbinden via USB-kabel... 4 Verbinden via Bluetooth... 4 Let op!... 4 mblock vs Scratch... 5 Input - output... 7 output: besturen
MBLOCK + MBOT INHOUD Inhoud... 2 De mbot aansluiten... 3 Voor je begint... 3 Verbinden via USB-kabel... 4 Verbinden via Bluetooth... 4 Let op!... 4 mblock vs Scratch... 5 Input - output... 7 output: besturen
Simon de schildpad. 2015 J van Weert 1
 Programmeren met Simon Simon de schildpad 2015 J van Weert 1 Inleiding: Wat is programmeren eigenlijk? Een computer doet niets zonder een programma. Die programma s worden geschreven door mensen: programmeurs.
Programmeren met Simon Simon de schildpad 2015 J van Weert 1 Inleiding: Wat is programmeren eigenlijk? Een computer doet niets zonder een programma. Die programma s worden geschreven door mensen: programmeurs.
Getting-started tutorial. Versie 1.0
 Getting-started tutorial Versie 1.0 Getting-started Apparaat toevoegen Installatie en activatie Getting-started tutorial In deze getting-started tutorial gaan we u helpen met de eerste stappen met ROXY,
Getting-started tutorial Versie 1.0 Getting-started Apparaat toevoegen Installatie en activatie Getting-started tutorial In deze getting-started tutorial gaan we u helpen met de eerste stappen met ROXY,
Rush Hour: pad-planning met een robot-arm
 Rush Hour: pad-planning met een robot-arm 24 juni 2016 Student: Nils Hulzebosch 10749411 Sjors Witteveen 10808493 Practicumgroep: F Docent: Arnoud Visser 1 Introductie Voor het vak Zoeken, Sturen en Bewegen
Rush Hour: pad-planning met een robot-arm 24 juni 2016 Student: Nils Hulzebosch 10749411 Sjors Witteveen 10808493 Practicumgroep: F Docent: Arnoud Visser 1 Introductie Voor het vak Zoeken, Sturen en Bewegen
4x4x4 LED cube deel 2
 4x4x4 LED cube deel 2 Dit deel beschrijft een mogelijke opbouw van de led cube. De constructie moet voor mij makkelijk in en uit elkaar te halen zijn. De Arduino is te interessant om zijn leven alleen
4x4x4 LED cube deel 2 Dit deel beschrijft een mogelijke opbouw van de led cube. De constructie moet voor mij makkelijk in en uit elkaar te halen zijn. De Arduino is te interessant om zijn leven alleen
Snelstartgids FiloCAD2
 Snelstartgids FiloCAD2 Inleiding FiloCAD 2 Met deze korte inleiding leert u de belangrijkste functionaliteiten van het programma FiloCAD2 kennen. Als u een FiloCUT3 machine bezit en de licentie heeft ontvangen,
Snelstartgids FiloCAD2 Inleiding FiloCAD 2 Met deze korte inleiding leert u de belangrijkste functionaliteiten van het programma FiloCAD2 kennen. Als u een FiloCUT3 machine bezit en de licentie heeft ontvangen,
Lego Mindstorms NXT practicum Middag 1
 Lego Mindstorms NXT practicum Middag 1 SmartProducts 24 april 2015 Mindstorms NXT practicum Lego Mindstorms NXT practicum Doel Vertrouwd raken met de mogelijkheden van Lego Mindstorms NXT Onderdeel van
Lego Mindstorms NXT practicum Middag 1 SmartProducts 24 april 2015 Mindstorms NXT practicum Lego Mindstorms NXT practicum Doel Vertrouwd raken met de mogelijkheden van Lego Mindstorms NXT Onderdeel van
Tentamen 8D040 - Basis beeldverwerking
 Tentamen 8D040 - Basis beeldverwerking 6 augustus 2008, 14.00-17.00 uur Vraag 1. (1.5 punten) Gegeven het binaire beeld Components (figuur 1). De componenten in dit beeld moeten automatisch gesegmenteerd
Tentamen 8D040 - Basis beeldverwerking 6 augustus 2008, 14.00-17.00 uur Vraag 1. (1.5 punten) Gegeven het binaire beeld Components (figuur 1). De componenten in dit beeld moeten automatisch gesegmenteerd
Objectverplaatsing door humanoids
 Objectverplaatsing door humanoids Zoeken, Sturen en Bewegen Joris Baan 10576681, David Stap 10608516, Tycho Koster 10667687, Pepijn van Diepen 10537473 June 27, 2014 Abstract Een humanoid wordt gebruikt
Objectverplaatsing door humanoids Zoeken, Sturen en Bewegen Joris Baan 10576681, David Stap 10608516, Tycho Koster 10667687, Pepijn van Diepen 10537473 June 27, 2014 Abstract Een humanoid wordt gebruikt
Figuur 4. lagerpunt iets verdraaid. lagerpunt goed uitgelijnd. extra wrijving
 Tips voor een goede werking van de slingerklok. Nadat het artikel over de staande klok in het clubblad van november 0 was verschenen, kreeg ik van iemand de vraag: ik heb de klok nagebouwd en zelfs met
Tips voor een goede werking van de slingerklok. Nadat het artikel over de staande klok in het clubblad van november 0 was verschenen, kreeg ik van iemand de vraag: ik heb de klok nagebouwd en zelfs met
Vrijdag 8 juni, 9.00-12.00 uur
 EXAMEN HOGER ALGEMEEN VOORTGEZET ONDERWIJS IN 1979 Vrijdag 8 juni, 9.00-12.00 uur NATUURKUNDE Dit examen bestaat uit 4 opgaven ft Deze opgaven zijn vastgesteld door de commissie bedoeld in artikel 24 van
EXAMEN HOGER ALGEMEEN VOORTGEZET ONDERWIJS IN 1979 Vrijdag 8 juni, 9.00-12.00 uur NATUURKUNDE Dit examen bestaat uit 4 opgaven ft Deze opgaven zijn vastgesteld door de commissie bedoeld in artikel 24 van
BEGINNERS EV3 PROGRAMMEERLES
 1 BEGINNERS EV3 PROGRAMMEERLES PSEUDOCODE Door Droids Robotics 2 Doelstellingen 1. Leer wat pseudocode betekent 2. Leer waarom je pseudocode gebruikt 3. Leer pseudocode te schrijven voor een algemene taak
1 BEGINNERS EV3 PROGRAMMEERLES PSEUDOCODE Door Droids Robotics 2 Doelstellingen 1. Leer wat pseudocode betekent 2. Leer waarom je pseudocode gebruikt 3. Leer pseudocode te schrijven voor een algemene taak
Module 2: Wat is Scratch?
 Module 2: Wat is Scratch? Inhoudsopgave Module 2: Wat is Scratch?...1 Wat is Scratch?...2 Eerste stappen...3 Je eerste Scratch programma...6 Scratch coördinaten...7 Verander de achtergrond van je werkgebied...10
Module 2: Wat is Scratch? Inhoudsopgave Module 2: Wat is Scratch?...1 Wat is Scratch?...2 Eerste stappen...3 Je eerste Scratch programma...6 Scratch coördinaten...7 Verander de achtergrond van je werkgebied...10
Gebruikers Toevoegen. EasySecure International B.V. +31(0)88 0000 083 Info@EasySecure.nl Support.EasySecure.nl. v2.0.11 22-09-2014
88 0000 083 Info@EasySecure.nl Support.EasySecure.nl. v2.0.11 22-09-2014") Gebruikers Toevoegen EasySecure International B.V. +31(0)88 0000 083 Info@EasySecure.nl Support.EasySecure.nl v2.0.11 22-09-2014 In deze handleidingen worden de volgende functies binnen de IdentySoft software
Gebruikers Toevoegen EasySecure International B.V. +31(0)88 0000 083 Info@EasySecure.nl Support.EasySecure.nl v2.0.11 22-09-2014 In deze handleidingen worden de volgende functies binnen de IdentySoft software
Morfologisch schema. Functies Idee 1 Idee 2 Idee 3 Idee 4 Grijpen Grijper met elastiek****** Grijper met kom*** Grijper horizontaal houden
 Morfologisch schema Functies Idee 1 Idee 2 Idee 3 Idee 4 Grijpen Grijper met elastiek****** Grijper met kom*** Grijper horizontaal houden Veersysteem Vierstangenmech anisme Verticale verplaatsing (zrichting)
Morfologisch schema Functies Idee 1 Idee 2 Idee 3 Idee 4 Grijpen Grijper met elastiek****** Grijper met kom*** Grijper horizontaal houden Veersysteem Vierstangenmech anisme Verticale verplaatsing (zrichting)
Workshop DisWis, De Start 13/06/2007 Bladzijde 1 van 7. Sudoku. Sudoku
 DisWis DisWis is een lessenserie discrete wiskunde die De Praktijk vorig jaar in samenwerking met prof.dr. Alexander Schrijver heeft opgezet. Gedurende vier weken komt een wiskundestudent twee blokuren
DisWis DisWis is een lessenserie discrete wiskunde die De Praktijk vorig jaar in samenwerking met prof.dr. Alexander Schrijver heeft opgezet. Gedurende vier weken komt een wiskundestudent twee blokuren
Opdracht: Hilberts hotel
 Opdracht: Hilberts hotel 0 Doel: creatief denken ik neem afstand van een probleem om het even op me te laten inwerken. pc met internetaansluiting, hoofdtelefoon Oneindig Ken je dit symbool? Het betekent
Opdracht: Hilberts hotel 0 Doel: creatief denken ik neem afstand van een probleem om het even op me te laten inwerken. pc met internetaansluiting, hoofdtelefoon Oneindig Ken je dit symbool? Het betekent
Basis Figuren. De basis figuren zijn een aantal wiskundige figuren die je al in de wiskunde lessen hebt gekregen.
 Inleiding Met de hulp van de schildpad kunnen verschillende figuren getekend worden. Van zeer eenvoudig tot zeer complex. Vaak kunnen de figuren op verschillende manieren getekend worden. De ene manier
Inleiding Met de hulp van de schildpad kunnen verschillende figuren getekend worden. Van zeer eenvoudig tot zeer complex. Vaak kunnen de figuren op verschillende manieren getekend worden. De ene manier
Figuur 124: De mayadiagrammen van enkele partities Opgaven hoofdstuk 8: Partities en andere afbeeldingen
 Hoofdstuk 16 Antwoorden of oplossingsrichtingen bij geselecteerde opgaven Opgave 8.1 a Het eerste voorbeeld van figuur 47 is het zelfde als figuur 48, dus dit hoort bij de lege partitie. Met behulp van
Hoofdstuk 16 Antwoorden of oplossingsrichtingen bij geselecteerde opgaven Opgave 8.1 a Het eerste voorbeeld van figuur 47 is het zelfde als figuur 48, dus dit hoort bij de lege partitie. Met behulp van
mailgroep photoshop Copyright Lesje: Stel je eigen kamer samen -
 Lesje: Stel je eigen kamer samen - http://www2.hku.nl/~fotoshop/img-tutorial5 In deze les gaan we een drie-dimensionale ruimte bouwen, in dit geval een gezellige woonkamer. Uiteraard mag je deze zelf in
Lesje: Stel je eigen kamer samen - http://www2.hku.nl/~fotoshop/img-tutorial5 In deze les gaan we een drie-dimensionale ruimte bouwen, in dit geval een gezellige woonkamer. Uiteraard mag je deze zelf in
Vier op een rij. Kevin van den Evenhuis. Max van Riele. Pepijn Stenveld. Windesheim 16 November 2012
 Vier op een rij Kevin van den Evenhuis Max van Riele Pepijn Stenveld Windesheim 16 November 2012 Inhoudsopgave Opdracht 1 blz 3 Opdracht 2 blz 4 Opdracht 3 blz 5 Eindopdracht blz 6 Discussie blz 8 Bijlagen
Vier op een rij Kevin van den Evenhuis Max van Riele Pepijn Stenveld Windesheim 16 November 2012 Inhoudsopgave Opdracht 1 blz 3 Opdracht 2 blz 4 Opdracht 3 blz 5 Eindopdracht blz 6 Discussie blz 8 Bijlagen
Afbeelding 12-1: Een voorbeeld van een schaakbord met een zwart paard op a4 en een wit paard op e6.
 Hoofdstuk 12 Cartesische coördinaten 157 Hoofdstuk 12 CARTESISCHE COÖRDINATEN In dit hoofdstuk behandelen we: Het Cartesisch coördinatenstelsel De X-as en de Y-as De commutatieve eigenschap van optellen
Hoofdstuk 12 Cartesische coördinaten 157 Hoofdstuk 12 CARTESISCHE COÖRDINATEN In dit hoofdstuk behandelen we: Het Cartesisch coördinatenstelsel De X-as en de Y-as De commutatieve eigenschap van optellen
Gevorderde EV3 Programmeer lessen
 1 Gevorderde EV3 Programmeer lessen Infrarood Sensor Door Droids Robotics 2 Doelstellingen 1. Leer hoe je een infrarood sensor moet gebruiken. 2. Leer hoe je een afstandsbediening en een programma dat
1 Gevorderde EV3 Programmeer lessen Infrarood Sensor Door Droids Robotics 2 Doelstellingen 1. Leer hoe je een infrarood sensor moet gebruiken. 2. Leer hoe je een afstandsbediening en een programma dat
Datum. Vraag het bedrag in BEF. Reken om naar EURO. Toon het bedrag in EURO. --- Vraag het bedrag in BEF--- --- Reken om naar EURO---
 3UREOHPHQRSORVVHQPHW9%$WRHSDVVLQJHQELMGHHO Naam. NR : Klas. PC : Datum. 23*$9( Hieronder vind je het algoritme om een bedrag in BEF om te rekenen naar EURO. Zet het algoritme om in programmacode. Noem
3UREOHPHQRSORVVHQPHW9%$WRHSDVVLQJHQELMGHHO Naam. NR : Klas. PC : Datum. 23*$9( Hieronder vind je het algoritme om een bedrag in BEF om te rekenen naar EURO. Zet het algoritme om in programmacode. Noem
Over Betuwe College. Lego Mindstorm project
 Inhoudsopgave 1 Het aansluiten van onderdelen.... 3 2 De lego software.... 4 2.1 Het programeerscherm.... 5 2.2 Programma naar NXT... 6 3 Introductie tot programmeren.... 7 3.1 De druksensor.... 7 3.2
Inhoudsopgave 1 Het aansluiten van onderdelen.... 3 2 De lego software.... 4 2.1 Het programeerscherm.... 5 2.2 Programma naar NXT... 6 3 Introductie tot programmeren.... 7 3.1 De druksensor.... 7 3.2
Stap 1. Batterij aansluiten. We gaan uit van een accu en niet van batterijen
 echniek Introductiekaart Niveau A 1 2 1 2 Begeleidende opmerking: kaart 0 is een kaart de een aantal grondbeginselen uitlegt en die handig is om er steeds even bij te houden. Er wordt op beschreven hoe
echniek Introductiekaart Niveau A 1 2 1 2 Begeleidende opmerking: kaart 0 is een kaart de een aantal grondbeginselen uitlegt en die handig is om er steeds even bij te houden. Er wordt op beschreven hoe
In Vlaanderen bestaat er nog geen leerlijn programmeren! Hierdoor baseren wij ons op de leerlijn die men in Nederland toepast voor basisscholen.
 Leerlijn programmeren In Vlaanderen bestaat er nog geen leerlijn programmeren! Hierdoor baseren wij ons op de leerlijn die men in Nederland toepast voor basisscholen. Deze leerlijn is opgebouwd aan de
Leerlijn programmeren In Vlaanderen bestaat er nog geen leerlijn programmeren! Hierdoor baseren wij ons op de leerlijn die men in Nederland toepast voor basisscholen. Deze leerlijn is opgebouwd aan de
Scratch in drie uur. Hallo, mijn naam is Minti Mint! Ik ga je uitleggen hoe je je eigen computerspel kunt maken. We gaan een racespel maken!
 Scratch in drie uur Hallo, mijn naam is Minti Mint! Ik ga je uitleggen hoe je je eigen computerspel kunt maken. We gaan een racespel maken! Bernd Gärtner Nederlandse vertaling en bewerking: Martine Segers
Scratch in drie uur Hallo, mijn naam is Minti Mint! Ik ga je uitleggen hoe je je eigen computerspel kunt maken. We gaan een racespel maken! Bernd Gärtner Nederlandse vertaling en bewerking: Martine Segers
IN BEWEGING. STEM-wetenschapper. STEM opdracht: Digitaal hulpmiddel
 STEM-wetenschapper Naam: Elke dag zitten Max en Mia 1 uur te gamen met hun digitaal apparaat. Mia heeft een ipad terwijl Max altijd op de smartphone van mama speelt. Ze gamen niet zomaar spelletjes hoor!
STEM-wetenschapper Naam: Elke dag zitten Max en Mia 1 uur te gamen met hun digitaal apparaat. Mia heeft een ipad terwijl Max altijd op de smartphone van mama speelt. Ze gamen niet zomaar spelletjes hoor!
Uitgebreid eindwerkvoorstel Lokaliseren van personen en objecten met behulp van camera s
 Uitgebreid eindwerkvoorstel Lokaliseren van personen en objecten met behulp van camera s Sofie De Cooman 21 December 2006 Stagebedrijf: Interne begeleider: Externe begeleider: BarcoView Koen Van De Wiele
Uitgebreid eindwerkvoorstel Lokaliseren van personen en objecten met behulp van camera s Sofie De Cooman 21 December 2006 Stagebedrijf: Interne begeleider: Externe begeleider: BarcoView Koen Van De Wiele
In de door ons gebruikte demo verloopt het herkennen van beelden in feite in 2 fasen:
 Practicum: deel 1 Hond zoekt Bal In het practicum Hond zoekt Bal laten we je kennis maken met de werking van supercomputers. We gebruiken daarvoor een applicatie waarmee met een webcam objecten herkend
Practicum: deel 1 Hond zoekt Bal In het practicum Hond zoekt Bal laten we je kennis maken met de werking van supercomputers. We gebruiken daarvoor een applicatie waarmee met een webcam objecten herkend
PROJECT 1: Kinematics of a four-bar mechanism
 KINEMATICA EN DYNAMICA VAN MECHANISMEN PROJECT 1: Kinematics of a four-bar mechanism Lien De Dijn en Celine Carbonez 3 e bachelor in de Ingenieurswetenschappen: Werktuigkunde-Elektrotechniek Prof. Dr.
KINEMATICA EN DYNAMICA VAN MECHANISMEN PROJECT 1: Kinematics of a four-bar mechanism Lien De Dijn en Celine Carbonez 3 e bachelor in de Ingenieurswetenschappen: Werktuigkunde-Elektrotechniek Prof. Dr.
Project Paper: Tiling problem
 Project Paper: Tiling problem Groep 11: Said Hattachi, Ismael el Hadad Hakim, Muttalip Küçük Januari 015 Abstract Dit artikel beschrijft een heuristiek waarmee een veld op een systematische wijze gevuld
Project Paper: Tiling problem Groep 11: Said Hattachi, Ismael el Hadad Hakim, Muttalip Küçük Januari 015 Abstract Dit artikel beschrijft een heuristiek waarmee een veld op een systematische wijze gevuld
Een spoedcursus python
 Een spoedcursus python Zoals je in de titel misschien al gezien hebt, geven wij een spoedcursus Python. Door deze cursus leer je alle basics, zoals het rekenen met Python en het gebruik van strings. Het
Een spoedcursus python Zoals je in de titel misschien al gezien hebt, geven wij een spoedcursus Python. Door deze cursus leer je alle basics, zoals het rekenen met Python en het gebruik van strings. Het
Introductiekaart Niveau B Installatie software
 echniek Introductiekaart Niveau B Installatie software 0 Installatie programmeer software - eenmalig Stap. Kijk op de computer of de Mindstorms software geïnstalleerd is. Als hij al geïnstalleerd is kan
echniek Introductiekaart Niveau B Installatie software 0 Installatie programmeer software - eenmalig Stap. Kijk op de computer of de Mindstorms software geïnstalleerd is. Als hij al geïnstalleerd is kan
BBR programmeren met Ardublock
 BBR programmeren met Ardublock Robotkamp 2017 www.e2cre8.be VTI Torhout Middenschool Sint-Rembert 1 Motoren Beide motoren kunnen: Vooruit of achteruit draaien Versnellen of vertragen van 0 tot 255 Let
BBR programmeren met Ardublock Robotkamp 2017 www.e2cre8.be VTI Torhout Middenschool Sint-Rembert 1 Motoren Beide motoren kunnen: Vooruit of achteruit draaien Versnellen of vertragen van 0 tot 255 Let
Hoe zou je dit vertellen aan iemand die er vandaag niet bij is? Leerlingen helpen om wiskunde te begrijpen: Vragen die: Ben je het er mee eens?
 Leerlingen helpen om wiskunde te begrijpen: 1 2 Welke strategie heb je gebruikt? 3 Ben je het er mee eens? Ben je het er mee oneens? 4 Zou je die vraag aan de klas kunnen stellen? 5 Kun je je 6 Wil 7 oplosmethode
Leerlingen helpen om wiskunde te begrijpen: 1 2 Welke strategie heb je gebruikt? 3 Ben je het er mee eens? Ben je het er mee oneens? 4 Zou je die vraag aan de klas kunnen stellen? 5 Kun je je 6 Wil 7 oplosmethode
Lego Mindstorms NXT practicum Middag 1
 Lego Mindstorms NXT practicum Middag 1 SmartProducts 21 april 2016 Mindstorms NXT practicum Lego Mindstorms NXT practicum Doel Vertrouwd raken met de mogelijkheden van Lego Mindstorms NXT Onderdeel van
Lego Mindstorms NXT practicum Middag 1 SmartProducts 21 april 2016 Mindstorms NXT practicum Lego Mindstorms NXT practicum Doel Vertrouwd raken met de mogelijkheden van Lego Mindstorms NXT Onderdeel van
Over Betuwe College. Lego Mindstorm project
 Inhoudsopgave 1 Zoeken op vragen.... 3 2 Regelen en sturen.... 3 2.1 Een Flag / signaal... 3 2.2 De motor.... 3 2.3 Verplaatsen.... 4 2.4 Omwentelingen meten... 6 2.5 Licht.... 7 2.6 Variabele.... 7 2.6.1
Inhoudsopgave 1 Zoeken op vragen.... 3 2 Regelen en sturen.... 3 2.1 Een Flag / signaal... 3 2.2 De motor.... 3 2.3 Verplaatsen.... 4 2.4 Omwentelingen meten... 6 2.5 Licht.... 7 2.6 Variabele.... 7 2.6.1
Handleiding voor installatie en gebruik van
 Handleiding voor installatie en gebruik van Opticon OPN-2001 Data Collector Inhoud pakket: - OPN-2001 - USB Communicatie kabel - Neckstrap Voordat u kunt communiceren met de OPN-2001 dient u de volgende
Handleiding voor installatie en gebruik van Opticon OPN-2001 Data Collector Inhoud pakket: - OPN-2001 - USB Communicatie kabel - Neckstrap Voordat u kunt communiceren met de OPN-2001 dient u de volgende
Opgave Tussentijdse Oefeningen Jaarproject I Reeks 4: Lcd Interface & Files
 Opgave Tussentijdse Oefeningen Jaarproject I Reeks 4: Lcd Interface & Files 1 Introductie In deze oefening zal je je LCD display leren aansturen. Je controleert deze display door er instructies naar te
Opgave Tussentijdse Oefeningen Jaarproject I Reeks 4: Lcd Interface & Files 1 Introductie In deze oefening zal je je LCD display leren aansturen. Je controleert deze display door er instructies naar te
Programmeren (1) Examen NAAM:
 Examen NAAM:") Schrijf al je antwoorden op deze vragenbladen (op de plaats die daarvoor is voorzien) en geef zowel klad als net af. Bij heel wat vragen moet je zelf Java-code schrijven. Hou dit kort en bondig. Je hoeft
Schrijf al je antwoorden op deze vragenbladen (op de plaats die daarvoor is voorzien) en geef zowel klad als net af. Bij heel wat vragen moet je zelf Java-code schrijven. Hou dit kort en bondig. Je hoeft
Compositie op basis van geometrische vormen
 Om goed heen en weer te kunnen springen tussen dia en afbeeldingen moet je dit bestand openen met Acrobat Reader. Voor het bekijken van de voorbeelden klik je op de blauwe link. Om terug te keren naar
Om goed heen en weer te kunnen springen tussen dia en afbeeldingen moet je dit bestand openen met Acrobat Reader. Voor het bekijken van de voorbeelden klik je op de blauwe link. Om terug te keren naar
Doorlopend patroon. Behang, gordijnen, bekledingsstoffen, verpakkingen. Dit dessin herhaalt zich en sluit naadloos op elkaar aan.
 Doorlopend patroon Behang, gordijnen, bekledingsstoffen, verpakkingen zijn vaak voorzien van een opdruk, een dessin. Dit dessin herhaalt zich en sluit naadloos op elkaar aan. In b.v. 3D max worden ook
Doorlopend patroon Behang, gordijnen, bekledingsstoffen, verpakkingen zijn vaak voorzien van een opdruk, een dessin. Dit dessin herhaalt zich en sluit naadloos op elkaar aan. In b.v. 3D max worden ook
Boe-Bots - Arduino robots
 Boe-Bots - Arduino robots Voorbereiding - wat hebben we allemaal nodig? 1) Een laptop met de Arduino IDE 2) Een Boe-Bot 3) Een USB printerkabel 4) De Boe Bot Library én NewPing library. Hier te downloaden.
Boe-Bots - Arduino robots Voorbereiding - wat hebben we allemaal nodig? 1) Een laptop met de Arduino IDE 2) Een Boe-Bot 3) Een USB printerkabel 4) De Boe Bot Library én NewPing library. Hier te downloaden.
START WISKUNDE-ESTAFETTE 2008 Je hebt 60 minuten voor 20 opgaven. Het totaal aantal te behalen punten is 500.
 START WISKUNDE-ESTAFETTE 2008 Je hebt 60 minuten voor 20 opgaven. Het totaal aantal te behalen punten is 500. Estafette-opgave 1 (30 punten, rest 470 punten) Uitgeveegd In de cirkeltjes heeft iemand de
START WISKUNDE-ESTAFETTE 2008 Je hebt 60 minuten voor 20 opgaven. Het totaal aantal te behalen punten is 500. Estafette-opgave 1 (30 punten, rest 470 punten) Uitgeveegd In de cirkeltjes heeft iemand de
Ga naar en remix het spel.
 Super Giga In deze handleiding is onze grote vriendin van het doolhof, Giga, terug om mee te gaan spelen. Maar deze keer gaan we een soort Mario spel maken. We laten Giga dus rennen, springen en ook nog
Super Giga In deze handleiding is onze grote vriendin van het doolhof, Giga, terug om mee te gaan spelen. Maar deze keer gaan we een soort Mario spel maken. We laten Giga dus rennen, springen en ook nog