Ontwerp van ingebedde ware-tijd software voor de ontvangst van Digital Radio Mondiale (DRM)
|
|
|
- Juliaan Cools
- 8 jaren geleden
- Aantal bezoeken:
Transcriptie
1 Universiteit Gent Faculteit Ingenieurswetenschappen Vakgroep Informatietechnologie Voorzitter: prof. dr. ir. P. Lagasse Ontwerp van ingebedde ware-tijd software voor de ontvangst van Digital Radio Mondiale (DRM) door Lieven TYTGAT Promotor: prof. dr. ir. J. Vandewege Scriptiebegeleider: ir. P. Demuytere Scriptie ingediend tot het behalen van de academische graad van burgerlijk elektrotechnisch ingenieur Academiejaar

2

3 Voorwoord Op het einde van mijn carrière als industrieel ingenieur had ik het gevoel dat ik nog net te weinig wist hoe alles in elkaar stak om zelf iets serieus uit te kunnen werken. Tijdens deze studies was ik heel gefascineerd rond alles wat met audiotechnologie te maken had, waardoor imijn keuze van thesisonderwerp vlug gekozen was, namelijk: Ontwerp van een High-End klasse-d versterker. Gedurende de loop van deze scriptie werd mij echter duidelijk dat mijn theoretische achtergrond te gering was om zelfstandig een nieuw principe, de sigma-delta modulatie, te doorgronden. Hierdoor heb ik de stap gezet om de studies van burgerlijk ingenieur aan te vangen. Met vallen en opstaan heeft deze studierichting mij heel wat bijgebracht. Een van de grootste leerervaringen die een student meemaakt, is echter nog steeds het creëren van een scriptie. De keuze van het onderwerp is hierdoor uiterst belangrijk. Ik heb voor het uitdagende onderwerp van: Ontwerp van ingebedde ware-tijd software voor de ontvangst van Digital Radio Mondiale (DRM), gekozen. Dit lag voor mij in de verdere lijn van audiotechnologie, alhoewel het niveau waarop dit zou gebeuren, in vergelijking met mijn eerdere scriptie, heel sterk verschillend was. Graag wil ik iedereen bedanken die mij in enige wijze geholpen en ondersteund heeft. Meer specifiek wil ik mijn promotor, prof. dr. ir. J. Vandewege en mijn begeleider, ir. P. Demuytere danken voor hun begeleiding en advies gedurende de loop van deze scriptie. Mijn vriendin, broers en vrienden wil ik bedanken voor hun steun en geduld op de ogenblikken dat het ietwat moeilijker was. Tenslotte wil ik nog mijn ouders bedanken, zonder dewelke ik niet in staat was om deze studies te kunnen volbrengen. De auteur geeft de toelating deze scriptie voor consultatie beschikbaar te stellen en delen van de scriptie te kopiëren voor persoonlijk gebruik. Elk ander gebruik valt onder de beperkingen van het auteursrecht, in het bijzonder met betrekking tot de verplichting de bron uitdrukkelijk te vermelden bij het aanhalen van resultaten uit deze scriptie. Lieven Tytgat I

4 Ontwerp van ingebedde ware-tijd software voor de ontvangst van Digital Radio Mondiale (DRM) door Lieven Tytgat Scriptie ingediend tot het behalen van de academische graad van burgerlijk elektrotechnisch ingenieur Academiejaar Promotor: Prof. Dr. Ir. J. Vandewege Scriptiebegeleider: Ir. P. Demuytere Faculteit Ingenieurswetenschappen Universiteit Gent Vakgroep Informatie Technologie Voorzitter: Prof. Dr. Ir. P. Lagasse Samenvatting Digital Radio Mondiale is een systeem dat ontwikkeld werd om de stilaan verouderende LF-MF-HF band nieuw leven in te roepen. Aangezien de kanaalbreedtes wereldwijd bepaald zijn, is het onmogelijk om deze te wijzigen. Daarom is het ontwerp van DRM er zo op gericht om deze kanalen zo efficiënt mogelijk te benutten. Wegens deze eisen is het systeem vrij complex en rekenintensief geworden. Om deze rekenkracht enigszins te milderen, werd geopteerd om een Linux gebaseerd hardware/software co-ontwerp te creëren. In hoofdstuk 1 wordt deze scriptie geplaatst binnen het geheel. Hoofdstuk 2 gaat dieper in op de DRM-standaard. In het derde hoofdstuk wordt de globale hardware architectuur gekozen, dewelke in het vierde hoofdstuk ontwikkeld wordt. Het Linux besturingssysteem wordt op het gecreëerde platform geplaatst in het vijfde hoofdstuk en tenslotte wordt in het zesde hoofdstuk de Dreamsoftware nader bekeken. trefwoorden: Digital Radio Mondiale, DRM, Dream, microblaze, uclinux, Linux, embedded, real-time, FPGA II

5 III
6 IV
7 INHOUDSTAFEL 1. Inleiding DRM-ontvanger Wat is DRM? DRM-technologie[1] Frequentie- en tijdsafregeling COFDM-Demodulatie Kanaaldecodering Decisie Celdeinterleaver (enkel voor MSC) Bitdeinterleaver Kanaaldecodering Datarate Brondecodering Demultiplexen Bron decodering Architectuurkeuze Inleiding Hardware/Software trade-off Complexiteit en Snelheid van een DRM-systeem Schatting van de ontwerpsduur Compleet hardware gebaseerd Complexiteit Snelheid Kostprijs Compleet software gebaseerd Complexiteit Snelheid Kostprijs Gesplitst hardware en software ontwerp Complexiteit en Snelheid Kostprijs V

8 Hardware/software codesign Complexiteit Snelheid Kostprijs Conclusie Besturingssysteem Voor- en nadelen van een besturingssysteem Keuze van het besturingssysteem Hardware overzicht Opbouw van het hardware platform Inleiding Minimale eisen van het besturingssysteem Bouwen van de basishardware Hardware verbeteringen Cache geheugen Klok frequenties Snelle download verbinding uclinux specifieke instellingen voor het hardware project Microblaze - uclinux Inleiding Memory Management Unit (MMU) Wat is een MMU?[3] Probleempunten bij het ontbreken van een MMU?[4] Reallocatie ter uitvoering van het proces Stackgeheugen Geheugenprotectie Wisselgeheugen uclinux versus Linux[4] Geheugenbeheer Stackgeheugen Malloc fork en vfork flat uitvoerbare bestanden Gedeelde bibliotheken Opzetten van het uclinux platform...40 VI
...34 5.2.1. Wat is een MMU?[3]...34 5.2.2. Probleempunten bij het ontbreken van een MMU?[4]...35 1.")
9 Software-instellingen Globale instellingen Kernelinstellingen Gebruikersinstellingen Debuggen op het microblaze platform Bord initialisatie Dream Overzicht Dream-software Dream-werkingsprincipes Frequentie- en tijdssynchronisatie[11] Ideale OFDM-demodulatie Afwijking v.d. IF-frequentie Afwijking v./d. bemonsteringsfrequentie Benodigde IF- en bemonsteringsfrequentieaccuraatheid Werkingsprincipe van de afregelkring Invloed op de embedded implementatie Frequentieacquisitie Tijdsacquisitie Kanaalschatting[14] Benodigde bibliotheken Porten van de software Toekomstmogelijkheden Conclusie Appendix A: Installatie van de Xilinx tools en Petalinux...68 A.1. Controle van de Linux omgeving...68 A.2. Installatie van de Xilinx tools...68 A.3. Installatie van de download cable (USB of parallel viii op parallel viv in viii compatibiliteit)...69 A.4. Installatie van Petalinux...70 A.5. Kermit A.6. Installatie van uclinux BSP bestanden voor Windows...72 Appendix B: Opzetten van de basishardware...73 Appendix C:Voorbereiding uclinux hardwareproject...78 C.1. Instelling van het softwareplatform in het hardwareproject...78 C.2. Instellen van de Bootloader FS-BOOT...80 VII

10 C.3. Hardware-software verbinding maken...81 Appendix D:Makefiles...83 D.1. Zonder gebruik van configure (Journaline Makefile)...83 D.2. Met gebruik van configure (Dream Makefile)...84 Bibliografie VIII
.")
11 Gebruikte afkortingen Afkorting Betekenis AAC Advanced Audio Coding AM Amplitude Modulatie ASIC Application Specific Integrated Circuit BER Bit Error Rate BRAM Block RAM CELP Code Excited Linear Prediction COFDM Coded Orthogonal Frequency Division Multiplexing DAB Digital Audio Broadcast DDS Direct Digital Synthesizer DFT Discrete Fourier Transform DMB Digital Multimedia Broadcast DRM Digital Radio Mondiale DVB Digital Video Broadcast FAAC Free Advanced Audio Coder FAAD Free Advanced Audio Decoder FAC Fast Associated Channel FFT Fast Fourier Transform FFTW FM FPGA FSL Fastest Fourier Transform of the West Frequentie Modulatie Field Programmable Gate Array Fast Simplex Link GPIO General Purpose Input Output HVXC Harmonic Vector excitation Coding ICI Inter Carrier Interference IDE Integrated Drive Electronics IF Intermediate Frequency ISI Inter Symbol Interference KSLOC Kilo Source Lines Of Code LAN Local Area Network LCD Liquid Crystal Display LF-MF-HF MLC MPEG MSC Laag Frequent Midden Frequent Hoog Frequent Multi Level Coding Moving Pictures Expert Group Main Service Channel IX

12 OFDM Orthogonal Frequency Division Multiplexing PIC Position Independant Code PS Parametric Stereo QAM Quadrature Amplitude Modulation RAM Random Access Memory SBR Side Band Replication SDC Service Description Channel SLOC Source Lines Of Code SRV VLAN XIP Signaal tot Ruis Verhouding Virtual LAN execute In Place X

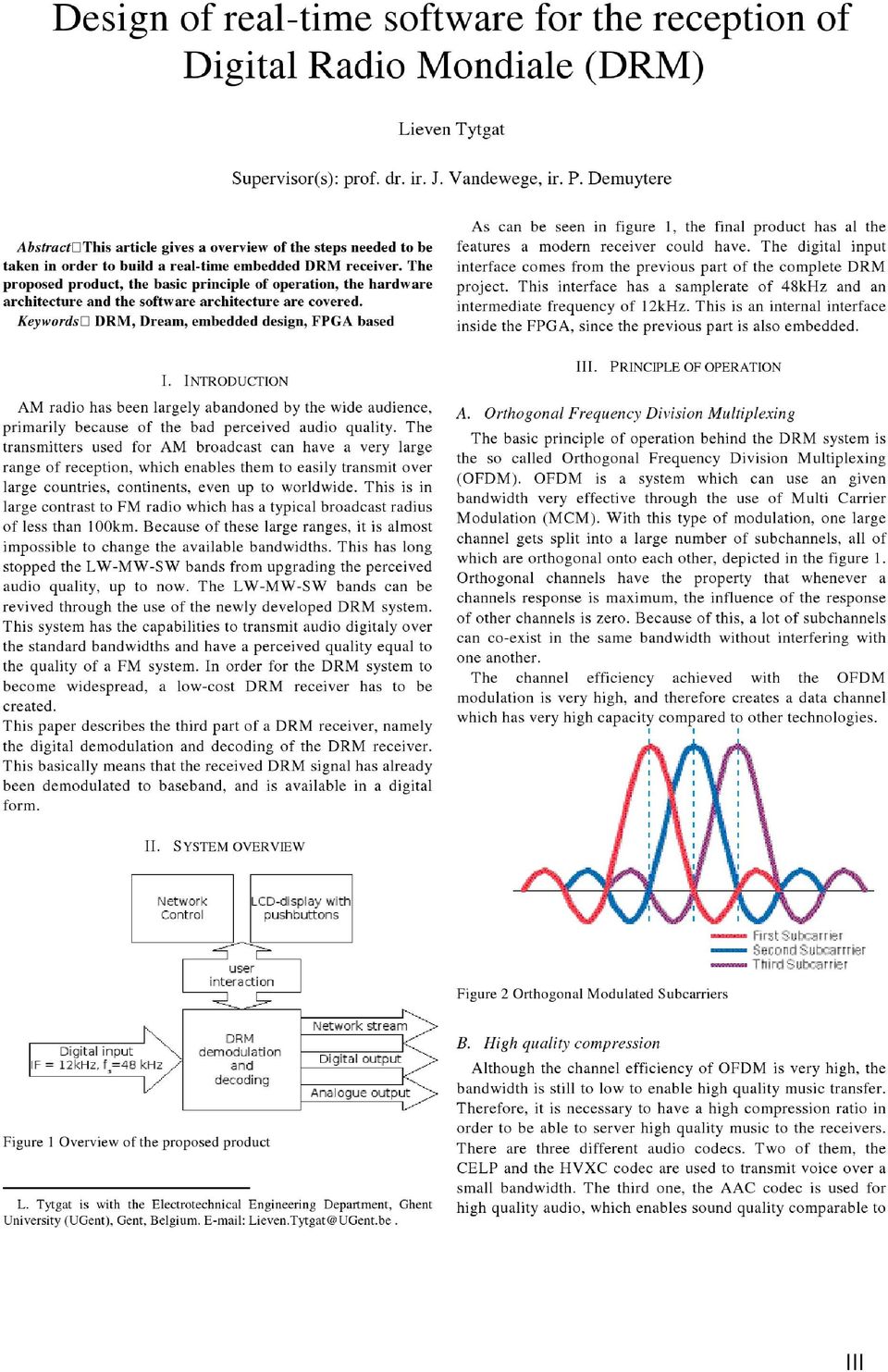
13 1.Inleiding Deze scriptie is één van in totaal drie scripties die handelen rond het ontwerpen van een DRM-ontvanger (Zie figuur 1.1). De eerste scriptie, uitgevoerd door Guy Torfs, handelt over het ontwerpen van een kortegolfantenne en front-end. De tweede scriptie, uitgevoerd door Guus Colman en Jasmien Put, handelt over het ontwerpen van een AGC controller, gevolgd door een digitalisatie en een digitale mixer. Het derde deel, en tevens het onderwerp van deze scriptie, handelt over het ontwerp van de DRM-demodulatie en decodering, om uiteindelijk tot een volledig zelfstandig werkende DRM-ontvanger te komen. Scriptie 1 Scriptie 2 Scriptie 3 Antenne AGC DRM demodulatie versterker A/D conversie DRM decodering Analoge mixer naar een IF van 5Mhz Digitale mixer naar een IF van 12kHz Afspelen muziek + Gebruikersinterface Figuur 1.1: Overzicht van de verscheidene scripties rond het ontwerpen van een DRMontvanger. Een dergelijke DRM-ontvanger legt een aantal eisen op aan het ontwerp van deze scriptie: 1. De ontvanger moet zelfstandig kunnen werken, zonder dat er een PC een deel van de taken voor zich neemt. 2. De DRM-ontvanger heeft een analoge en/of een digitale interface naar buiten toe. 3. De DRM-ontvanger moet een mogelijkheid bieden om de besturing lokaal te laten gebeuren (met drukknoppen, infrarood of gelijkaardig). 4. Tussen scriptie twee en scriptie drie bevindt zich een digitale verbinding. 5. Optioneel: Mogelijkheid om via netwerk te besturen en te beluisteren. Het blokschema van een dergelijk systeem is te vinden in figuur

14 Netwerk besturing LCD-display met pushbuttons Interactie met gebruiker Digitale ingang IF = 12kHz, fs=48 khz DRM demodulatie en decodering Netwerk stream Digitale uitgang Analoge uitgang Figuur 1.2: Overzicht van de vooropgestelde mogelijkheden die het product zou kunnen verschaffen Het ontwerpen van een DRM-ontvanger begint natuurlijk met het nader bekijken van de DRM-standaard, zoals in hoofdstuk twee besproken wordt. Zonder deze stap is het onmogelijk om een enigszins gefundeerde beslissing te nemen rond de mogelijke ontwerpkeuzes. In hoofdstuk drie worden de verschillende mogelijke hardwarearchitecturen bekeken. Na deze studie wordt de vraag gesteld of een besturingssysteem hier een extra toegevoegde waarde zou kunnen bieden. Het vierde hoofdstuk draait rond het ontwerpen van het hardwareplatform vooropgesteld in hoofdstuk drie. Vooral de hardware-eisen van het besturingssysteem worden specifiek van naderbij bekeken. Eenmaal het hardwareplatform vastgelegd werd, was het moment aangebroken om de keuze te maken over het wel of niet gebruiken en de keuze van een besturingssysteem. Hoofdstuk zes gaat dieper in op de werking van de Dream-software, gevolgd door de grootste stappen die nodig zijn voor het porten naar het platform. Tenslotte wordt in het laatste hoofdstuk de totale afrekening gemaakt. Wat zijn de sterke en zwakke punten van het product, waar ging het goed en waar was het minder. 2

15 2.DRM ontvanger 2.1.WatisDRM? DRM staat voor Digital Radio Mondiale, wat vrij vertaald wordt in digitale wereldomroep. Het gaat dus over digitale audio uitzendingen in de LF-MF-HF (30kHz tot 30Mhz) band. Aangezien het zendgebied van dergelijke zenders wereldomvattend kan zijn, is het praktisch onmogelijk om de beschikbare kanalen aan te passen aan de nieuwe technologie. Dit zou namelijk betekenen dat de wereldwijde regulerende instanties de beschikbare kanalen zouden moeten aanpassen, wat een onmogelijke opdracht is. Vandaar dat er bij DRM voor gekozen werd om de beschikbare kanalen zo goed mogelijk te benutten. Dit staat in heel groot contrast met de standaarden DAB, DVB en DMB. Hierbij werden kanalen beschikbaar gemaakt specifiek voor deze standaarden. Helaas zijn deze niet wereldwijd bepaald. De zendbereiken zijn echter ook beperkt, waardoor dit geen echt probleem oplevert. De standaard bandbreedte van een AM kanaal is slechts 9 of 10kHz. De ontvangstkwaliteit van een standaard DRM-kanaal is gelijkaardig aan huidige stereo FM ontvangst. DRM heeft dus slechts 10kHz bandbreedte nodig om met dezelfde kwaliteit als FM te kunnen ontvangen, waar stereo FM 53kHz bandbreedte nodig heeft. Hieruit volgt dat de complexiteit van de codering vrij hoog moet liggen om een dergelijke ontvangstkwaliteit te kunnen garanderen. DRM kan ook extra informatie meesturen met de audiostream. De audiostream wordt verpakt in een MPEG-4 container, waardoor deze extra informatie interleaft kan worden met de audiostream. 2.2.DRM technologie[1] De DRM-technologie is volledig gebouwd rond het optimaal benutten van het kanaal. Een heel aantal nieuwe technologieën wordt gebruikt om het mogelijk te maken kwalitatief geluid over te brengen naar wereldwijde ontvangers. Dit hoofdstuk zal dan ook de ontvangstkant van een DRM-systeem bekijken, waarvan een blokschema is weergegeven in figuur 2.1. Het ontvangen signaal bevindt zich al in 'pseudo'-basisband. 3

16 Audio bron dec. Ontvangen signaal Tijd en freq. afregeling COFDM Demod + decisie Deinterleaver MSC Kanaal dec Data bron dec. FAC kanaal dec Bron Decodering SDC Kanaal dec Bron Decodering Figuur 2.1: Globaal blokschema van een DRM-demodulator en decoder. Het eerste deel is de tijds- en frequentieafregeling, gevolgd door de COFDM-demodulatie en decisie. Hierna wordt de gegevensstroom opgesplitst in een MSC-kanaal (Main Service Channel), een FAC-kanaal (Fast Access Channel) en een SDC-kanaal (Service Description Channel). Het MSC-kanaal bevat de audio en data services die gebonden zijn aan een zender. Het FAC-kanaal maakt het mogelijk om de zendmodus van de zender snel te weten te komen. Door het FACkanaal kan ook snel gescand worden. Tenslotte is het SDC-kanaal het kanaal dat informatie draagt over de decodering van de MSC, en over het vinden van alternatieve zenders Frequentie entijdsafregeling Een DRM-signaal beschikt niet over een carrier waarop kan gesynchroniseerd worden. Hierdoor wordt het heel wat moeilijker om op het signaal te kunnen locken. Vandaar dat er gekozen werd om een framestructuur te gebruiken, zoals in figuur 2.2 weergegeven. Deze structuur is zodanig opgebouwd dat het mogelijk is een degelijke synchronisatie te maken zonder veel verlies van bandbreedte of SRV. Het grootste frame is het superframe. Dit superframe bestaat uit drie transmissieframes, waarvan het allereerste blok een SDC-blok is. Een transmissieframe duurt 400ms, en bevat een aantal COFDM-symbolen. Het eerste symbool van een transmissieframe is een tijdsreferentie symbool. Het aantal COFDM-symbolen binnen een transmissieframe is afhankelijk van de modus waarin de zender werkt (Modus A + B: 15, modus C: 20, modus D: 24). Ieder COFDM-symbool beschikt over een guard interval aan het begin van het symbool, hetwelk bestaat uit een cyclische uitbreiding van het symbool. De lengte van dit interval is net als de totale symboollengte afhankelijk van de modus waarin DRM werkt. 4

17 Superframe 3 Transmissie frames SDC cellen 400 ms Ns COFDM symbolen Tijds referentie cellen Figuur 2.2: Overzicht van het superframe van een DRM-systeem De verzonden data wordt gemoduleerd d.m.v. een COFDM-modulatie. COFDM splitst de beschikbare bandbreedte op in een heel aantal kleine subkanaaltjes die orthogonaal gemoduleerd zijn, om zodoende overspraak van het ene kanaal op het andere te voorkomen. Ieder subkanaal wordt een cel genoemd. Deze cellen hebben drie verschillende mogelijke constellaties: 4-QAM, 16-QAM of 64QAM en bezitten geen carrier. Bij COFDM moet echter coherente ontvangst plaatsvinden, die enkel kan voltooid worden door het detecteren van de frequentiereferenties. Deze liggen op vaste frequenties: 750Hz, 2250Hz en 3000Hz, en hebben een vermogen versterking van 2. In de verschillende zendermodi zijn dit verschillende cellen omdat deze kanalen een bandbreedte hebben die afhankelijk is van de modus. Robuust- 750Hz cel 2250Hz cel 3000Hz cel heids cel fase cel fase cel fase modus nummer index nummer index nummer index A B C D Tabel 2.1: Frequentiereferentiecellen en hun respectievelijke faseindex bij de verschillende robuustheidsmodi. fase index= fase

18 Deze frequentiereferenties lopen continu verder waardoor over alle symbolen een continu signaal met vaste frequentie ontstaat. Het eerste symbool van ieder transmissie frame bevat een groot aantal tijdsreferentiecellen. In een tijdsreferentiecel liggen de fases en amplitudes vast, gelijkaardig aan de frequentiereferentiecellen. Door de grote hoeveelheid vaste referentiecellen in dit symbool is het echter mogelijk om deze op tijds- en frequentiegebied heel exact te bepalen. Eenmaal de tijdsreferentiesymbolen gevonden zijn is het begin van een frame gevonden. Om de subkanalen exact te kunnen modelleren worden er zogenaamde pilootcellen meegestuurd. Deze pilootcellen wijzigen telkens van subkanaal (=cel) bij ieder nieuw COFDM-symbool, waardoor elk subkanaal apart kan gesynchroniseerd worden. M.a.w., de kanaalvervorming kan hierdoor heel goed geschat worden voor ieder subkanaal, zonder dat elk subkanaal een vaste carrier nodig heeft. De locaties van de pilootsymbolen herhalen zich in ieder transmissieframe. Het aantal pilootcellen is afhankelijk van de gekozen robuustheidsmodus en de kanaal bandbreedte COFDM Demodulatie Eenmaal de tijds- en frequentieafregeling voltooid is, volgt de COFDMdemodulatie. Deze demodulatie en de tijds- en frequentieafregeling zijn echter afhankelijk van elkaar. De tijds- en frequentieafregeling kan namelijk enkel plaatsvinden indien het ontvangen signaal gedemoduleerd werd (frequentiedomein naar tijdsdomein terugkoppeling). COFDM wordt gedemoduleerd door middel van het uitvoeren van een DFT op het binnenkomende signaal. Hierdoor worden alle subkanalen die gemultiplexed worden via COFDM terug parallel beschikbaar. Ieder subkanaal kan nu apart gedeciseerd worden. De lengte van de DFT is gelijk aan het aantal elementaire tijdseenheden dat in het bruikbare deel van een symbool aanwezig is (Tu in tabel 2.2). Hieruit volgt dat het onmogelijk is om via het FFT algoritme te werken, aangezien een FFT altijd een macht van twee lang is. Een volledig symbool bezit naast het bruikbare deel nog een guard interval met lengte Tg. Tesamen hebben deze dan een volledige symbooltijd, Ts. Tabel 2.2 toont de verschillende symbooltijden en het aantal gebruikte kanalen i.f.v. de robuustheidmodus en de totale kanaalbandbreedte. 6

19 Robuustheid Tu Tg Ts Modus Tabel Gebruikte kanalen i.f.v. bandbreedte (Tu+Tg) 4, A B C D tijden worden 2.2: Samenvatting van de COFDM-symboolparameters. weergegeven in veelvouden van de elementaire periode T = De 831/ 3 s Kanaaldecodering De kanaalcodering is een zogenaamde multilevel-codering. Het basisprincipe van multilevel-codering houdt in dat de kanaalcodering en de modulatie aangepast zijn aan elkaar om zodoende de optimale Bit Error Rate (BER) te bekomen. Dit betekent in realiteit hoofdzakelijk dat de bit posities die sneller foutief ontvangen zullen worden, een hogere beschermingsgraad kunnen krijgen door de kanaalcodering. De kanaaldecodering wordt voor elk kanaal (MSC, FAC en SDC) apart uitgevoerd. Ze bestaat uit vier delen voor het MSC kanaal, en drie delen voor de FAC en SDC kanalen. Decisie Cell Deinterleaver Bit Deinterleaver Kanaal Decoder MSC data Decisie Bit Deinterleaver Kanaal Decoder FAC data Decisie Bit Deinterleaver Kanaal Decoder SDC data Figuur 2.3: Overzicht van de kanaaldecodering 1.Decisie De eerste stap na de demodulatie is de decisie. De decisie is een standaard decisie die op ieder subkanaal (cel) uitgevoerd wordt. Er zijn drie verschillende constellaties mogelijk: 4-QAM, 16-QAM en 64-QAM. 7
 te bekomen.")
20 2.Celdeinterleaver(enkelvoorMSC) In de decodering van het MSC-kanaal is de volgende stap de celdeinterleaver. Een celinterleaver zorgt ervoor dat de data die door middel van de kanaalcodering tegen fouten beveiligd is, gespreid wordt over verschillende cellen binnen één kanaal. Hierdoor betekent het verlies van een aantal opeenvolgende cellen niet dat alle gegevens binnen deze cellen verloren zijn. De gegevens van deze cellen kunnen meestal gecorrigeerd worden door de kanaaldecodering. Zonder een celinterleaver is de kans dat een aantal opeenvolgende verloren cel niet kunnen gecorrigeerd worden heel wat groter. De celdeinterleaver is een convolutionele deinterleaver en heeft twee verschillende werkingsmodi: een korte of een lange deinterleaver. Afhankelijk van de te verwachten ontvangstcondities wordt een van deze modi gekozen door de zender. De korte interleaver introduceert een vertraging van 2 superframes (=800ms), terwijl de lange interleaver een vertraging van 6 superframes introducueert (=2,4s). De lange interleaver is beter geschikt voor kanalen met heel grote tijdsdomein-fading. 3.Bitdeinterleaver Deze interleavers zorgen er voor dat binnen de bitstream burstfouten mogen optreden. Deze zijn namelijk heel snel mogelijk indien vb. één cel verloren gaat. Deze cel introduceert een aantal bitfouten na elkaar (2, 4 of 6 afhankelijk van de constellatie), waardoor een interleaving op bitniveau deze fouten kan corrigeren. De bitdeinterleavers zijn, net zoals de celinterleavers bij MSC, convolutionele deinterleavers. De blokgrootte is afhankelijk van het kanaal. Bij de FAC en SDC kanalen is er maar één modus beschikbaar, terwijl er bij het MSC-kanaal verschillende modi beschikbaar zijn. 4.Kanaaldecodering De kanaaldecodering wordt in de Dream-software uitgevoerd als een viterbi-decodering. De codering is een zogenaamde 'punctured' convolutionele codering. Uit de uitvoer van één convolutionele encoder met vier uitgangen, zoals in figuur 2.4 weergegeven, worden de verschillende codesnelheden gecreëerd aan de hand van een zogenaamd puncturing patroon. 8

21 Figuur 2.4: De vier-uitgangs convolutionele encoder Het zogenaamde puncturing patroon maakt een nieuw codewoord als een combinatie van deze uitgangsbits. Als voorbeeld van de werking wordt het codesnelheid 3/10 puncturingpatroon genomen, zoals in onderstaande tabel weergegeven. Uitgang Bitx,0 Bitx,1 Bitx,2 B0,x B1,x B2,x B3,x Repeterend patroon per 3 ingangsbits b0,0b1,0b2,0b3,0b1,1b2,1b3,1b2,0b2,1b2,2 De FAC- en SDC-kanalen worden altijd met één vaste codesnelheid geëncodeerd, terwijl het MSC-kanaal gebruik kan maken van twee verschillende codesnelheden. Hierdoor kunnen de gegevens in het MSC-kanaal op twee verschillende beveiligingsniveaus beveiligd worden. 5.Datarate De totale datarate aan informatiebits mogelijk doorheen het gecodeerde kanaal varieert heel sterk afhankelijk van de robuustheidsmodus, de bandbreedte van het kanaal, de constellatie en de gebruikte kanaalcodering. De maximale en minimale datarates afhankelijk van de robuustheidsmodus worden hieronder weergegeven. 9
22 Robuustheidsmodus Max. datarate (kbps) Min. datarate (kbps) A 72 6,3 B 56,1 4,8 C 45,5 9,2 D 30,6 6,1 Tabel 2.3: Max. en min. datarate beschikbaar voor de bronencoder.[2] Brondecodering De brondecodering wordt enkel besproken voor het MSC-kanaal, daar deze veruit de hoogste complexiteit bezit. Tevens is er rond de data-brondecodering heel weinig informatie te vinden. Er is wel de zogenaamde journaline-decoder, die tevens bij Digital Audio Broadcast (DAB) en Digital Multimedia Broadcast (DMB) gebruikt wordt. Hier zal echter niet dieper op ingegaan worden. Hoge bescherming Vanaf MSC kanaaldec. Lage bescherming Demultiplexer Audio bron decoder Hoge bescherming Lage bescherming Data bron decoder Naar gebruiker Naar gebruiker Figuur 2.5: Overzicht van de brondecodering 1.Demultiplexen De gegevens die vanaf de MSC-kanaaldecodering binnenkomen bevatten één tot vier streams. Elke stream bestaat uit logische frames van 400ms en bevat ofwel audio ofwel data. Een audiostream kan nog één data-substream bezitten (om bv. de huidige artiest mee te sturen). Een datastream kan uit vier of minder substreams bestaan, dewelke elk één service bevatten. Ieder logisch frame kan een opsplitsing hebben in twee verschillende beveiligingsniveaus. Binnen één stream is het dus mogelijk dat er twee verschillende beveiligingsniveaus zijn. 10
23 2.Brondecodering Er zijn een aantal verschillende bron decoders aanwezig om aan de verscheidene eisen van de gebruikte geluidsstromen (muziek of stem) te kunnen voorzien. Deze zijn allemaal beschreven in de MPEG-4 standaarden. Advanced Audio Coding (AAC) is bedoeld als hogekwaliteits muziek-codec. Code Excited Linear Prediction (CELP) is een spraak-codec die toelaat om spraak op een vrij lage bitrate (vb. 8 kpbs) uit te kunnen zenden. Harmonic Vector excitation Coding (HVXC) is ook een spraak-codec, maar die bij extreem lage bitrates (tot 2 kpbs!) toch nog een redelijke kwaliteit heeft. AAC decoder Super frame Demultiplexer CELP decoder SBR decoder Audio Uitgang HVXC decoder Figuur 2.6: Overzicht van de audio bron decodering Tenslotte kan bij iedere codec tevens de Side Band Replication (SBR) geactiveerd worden. Dit is een codec die hoogfrequent geluid, dat door één van voorgaande codecs niet kon worden gecodeerd wegens de te kleine bandbreedte, toch door kan sturen. Hiervoor wordt slechts een klein deel van de beschikbare bandbreedte gebruikt. Een gelijkaardig systeem laat ook toe om een Parametrische Stereo (PS) signaal te genereren. Hierbij wordt een mono signaal gedownmixt, om dit dan samen met het verschil tussen het mono en de twee stereo kanalen uit te zenden. Tenslotte moet er nog vermeld worden dat er slechts een aantal van de bij MPEG-4 mogelijke instellingen ondersteund word. De belangrijkste beperkingen zijn: Beperkte bitrate Beperkte samplefrequentie Foutrobuustheid: Een aantal instellingen die het systeem heel bitfout gevoelig maken zijn niet toegelaten. Hierdoor blijft de foutrobuustheid zo hoog mogelijk te houden. De (super)framelengte van de bron encoder moet exact in een transmissieframe van 400ms passen. 11
24 3.Architectuurkeuze 3.1.Inleiding De architectuurkeuze van een embedded systeem bepalend voor de uiteindelijke mogelijkheden van het systeem. Vooreerst wordt de hardware/software trade-off bekeken. Hierin wordt getracht om op een gefundeerde manier een globale architectuur te kiezen. Daarna wordt het nut van een besturingssysteem op een dergelijk hardwareplatform bekeken. Tenslotte wordt de effectieve hardwarearchitectuur overlopen. 3.2.Hardware/Softwaretrade off In eerste instantie wordt de definitie van de hardware architectuur herleid tot een hardware/software trade-off. De keuze wordt herleid tot vier mogelijke soorten systemen. 1. Compleet hardware gebaseerd 2. Compleet software gebaseerd 3. Gesplitst hardware en software ontwerp 4. Hardware/software codesign In de volgende delen zullen deze vier mogelijkheden verder uitgediept worden. Om een gefundeerde keuze te maken zullen de verschillende aanpakken op drie punten vergeleken worden. Als eerste luik worden de verschillende aanpakken beoordeeld op gebied van mogelijke ontwerpcomplexiteit. Ten tweede wordt de mogelijke verwerkingssnelheid geschat en tenslotte zal de totale kostprijs van het systeem geschat worden ComplexiteitenSnelheidvaneenDRM systeem De complexiteit van een volledige DRM-systeem is, zoals in hoofdstuk 2 beschreven, zeker niet te onderschatten. Uit figuur 3.1 kan men vier essentiële delen halen. Gesampeld signaal Acquisitie OFDM demodulatie Kanaal decodering Bron decodering Muziek Figuur 3.1: Beknopt blokschema van een DRM-systeem 12
25 Ieder van deze vier delen bezit een verschillende nood aan verwerkingssnelheid en complexiteit. Het eerste deel handelt hoofdzakelijk over frequentie- en sampleratedetectie en afregeling. Dit deel is het meest 'eenvoudige', en tijdskritische deel van een DRM-ontvanger. Het tweede deel, de OFDMdemodulatie is al een stuk complexer, omdat er nu al gelockt moet worden op de ontvangen OFDM-symbolen. Onderstaande tabel geeft een overzicht van de benodigde bewerkingen in de acquisitie en OFDM-demodulatie stappen. Modus A Bewerking B C D * + * + * + * + 72k 24k 72k 24k 72k 24k 72k 24k Tijds sync. 144k 168k 144k 168k 144k 168k 144k 168k Freq. sync. 108k 43k 96k 38k 88k 35k 67k 27k FFT 396k 396k 346k 346k 298k 298k 210k 210k Channel eq. 43k 22k 38k 19k 35k 18k 27k 13k Channel est. 17k 34k 16k 31k 14k 28k 11k 21k <10k <10k <10k <10k <10k <10k <10k <10k Mixer Overige Tabel 3.1: Overzicht van het aantal optellingen of vermenigvuldigingen benodigd per seconde voor de verschillende onderdelen van de acquisitie en OFDM-demodulatie.[2] Vanaf dit punt stijgt de complexiteit heel sterk. De kanaaldecodering is nog ingewikkelder, aangezien hier de deinterleaving en de viterbidecodering plaatsvinden. Hierbij is er ook een vrij grote verwerkingssnelheid benodigd. Tenslotte is de brondecodering het meest complexe en rekenintensieve deel van de volledige ontvanger Schattingvandeontwerpsduur Om een schatting te bekomen van de omvang van een dergelijk systeem wordt het aantal broncodelijnen, de zogenaamde Source Lines Of Code (SLOC) van de Dream-software naderbij bekeken. In onderstaande tabel wordt een overzicht gegeven van het aantal codelijnen die benodigd zijn. De Dream-software is voorzien van een grafische gebruikersinterface gebaseerd op QT. Aangezien de uiteindelijke oplossing deze gebruikersinterface niet benodigd heeft, zal deze nergens meegerekend worden. Er moet nog opgemerkt worden dat de functionaliteiten die de fftw2 bibliotheek biedt veel groter zijn dan de benodigde functionaliteiten. Om geen vals beeld te 13
26 geven wordt een gewichtsfactor t.o.v. het werkelijk aantal codelijnen van 10% meegerekend worden. De FAAD2 audiodecodering daarentegen zal vrij compleet gebruikt worden, waardoor een gewichtsfactor van 75% gekozen wordt. Tenslotte zal van de datacompressiebibliotheek, zlib, enkel de decodering gebruikt worden, waardoor een gewichtsfactor van 50% gekozen wordt. Dream is in hoofdzaak in C++ geschreven. De bibliotheken zijn allemaal in C geschreven. Om de schatting eenvoudig te houden wordt er geen verschil gemaakt tussen C en C++ code. Onderdeel SLOC Benodigde SLOC Input-Output Kanaal schatting Resample Synchronisatie Totaal acquisitie: fftw2 (10% gewichtsfactor) , , FAC-decodering SDC-decodering Totaal Kanaaldecodering Audio decodering (FAAD2) (75% gewichtsfactor) ,25 Data decompressie (ZLIB) (50% gewichtsfactor) Data decodering Totaal Brondecodering ,25 Totaal voor de gehele oplossing ,55 interleaver OFDM mapper Totaal COFDM-Demodulatie Multi Level Decodering Tabel 3.2: Overzicht van de SLOC benodigd bij de verschillende onderdelen van Dream. Eenmaal deze gegevens gekend zijn is het mogelijk om deze om te zetten in een geschatte ontwerpsduur aan de hand van het basis COCOMO model[16]. Dit model maakt een schatting van de benodigde persoonsontwerpsmaanden afhankelijk van het aantal Kilo-SLOC (KSLOC). 14
27 Onderdeel KSLOC E (pm) D (m) P (p) 10,982 63,84 9,45 6,75 Demodulatie 9,336 52,54 8,88 5,92 Kanaaldecodering 7,852 42,69 8,31 5,14 Brondecodering 87, ,42 20,99 36,8 Totaal 115, ,03 23,36 46,19 Acquisitie Tabel 3.3: Overzicht van de benodigde Effort (E) in persoonsmaanden, de optimale tijdsduur (D) en de benodigde bezetting (P) van het project. In de bovenstaande tabel valt op dat de minimale verwachte tijdsduren voor de verschillende delen minimum 52 maand is. Het totale systeem wordt geschat op een totaal van om en bij de 1100 maand. Deze schatting lijkt extreem hoog. Het grootste deel van de tijd is echter vervat in de brondecodering. Deze werd al gedurende verschillende jaren door een heel aantal mensen uitgebreid en aangepast, waardoor deze waarden toch mogelijk lijken. Uit bovenstaande table volgt vrijwel onmiddellijk dat het ontwerpen van het volledige systeem onmogelijk haalbaar is binnen de context van één scriptie Compleethardwaregebaseerd Het compleet hardware gebaseerd ontwerp houdt in dat de volledige DRMontvanger geschreven wordt in een hardware beschrijvende taal zoals VHDL of VERILOG. Het vertalen van een software project in een hardware project is echter geen sinecure omwille van de volledig verschillende aard van hardware en software. 1.Complexiteit Het volledige systeem in hardware bouwen is onmogelijk gedurende de looptijd van één scriptie. Zelfs indien hardwareontwerp even snel zou zijn als softwareontwerp is het geheel heropbouwen niet haalbaar (zie tabel 3.3). Het ontwikkelen van een dergelijk complex software systeem duurde bij de makers van de Dream-software trouwens al meerdere jaren (vanaf begin 2001 tot eind 2003 vooraleer een eerste volledige versie klaar was), en zij hadden nog nood aan een open source community die hun de brondecoder (libfaad) ter beschikking stelde. Het bouwen van de acquisitie (zie figuur 3.2) is echter misschien haalbaar binnen de looptijd van deze scriptie. 15
28 2.Snelheid Bij het ontwerpen van een hardware gebaseerde DRM-ontvanger komt de snelheidsvraag bijna niet voor. De benodigde verwerkingssnelheden bij DRM zijn relatief laag. Het totale systeem heeft wel een vrij grote verwerkingscapaciteit nodig, maar de vereiste snelheid per onderdeel blijft toch laag. 3.Kostprijs De kostprijs van dit systeem zal vrij hoog worden omdat er een heel groot en complex hardware project zal moeten geschreven worden. DRM is namelijk ontworpen om de beschikbare kanalen zo efficiënt mogelijk te benutten. Om dit te kunnen verwezenlijken is er een heel sterk adaptief systeem nodig, wat heel moeilijk te beschrijven valt in hardware. Kortom, de ontwerpskost zal heel hoog zijn. Ten tweede zal het benodigd aantal logische poorten in het hardware ontwerp heel groot worden, waardoor men niet op kleine ASIC's of FPGA's kan overstappen. Tevens moeten de benodigde functies naar hardwarenormen niet heel snel zijn, waardoor een heel groot deel van de hardware slechts heel weinig benut wordt. Hierdoor dreigt dit een erg kostelijke oplossing te worden Compleetsoftwaregebaseerd Het software gebaseerd ontwerp komt er op neer dat de beschikbare software geport wordt naar een bepaalde processor/dsp. Het gaat hier dus over een relatief eenvoudige oplossing. 1.Complexiteit Een software gebaseerde oplossing kan heel goed overweg met heel complexe ontwerpen. Er bestaan trouwens al twee software gebaseerde oplossingen, Dream en Diorama, waardoor er zeker geen problemen op gebied van software verwacht worden. 2.Snelheid Op de website van de Dream-software DRM-radio wordt er vermeld dat de software op de achtergrond kan werken op een 700Mhz pentium 3 PC. Dit geeft onmiddellijk de indruk dat het om een vrij rekenintensief stukje software gaat. Vandaar dat een zuiver software oplossing een heel krachtige processor zal nodig hebben. Omdat het echter de bedoeling is om uiteindelijk een 'draagbaar' 16
29 toestel te bekomen is het bijna onmogelijk om een dergelijke processor te gebruiken. Zo'n processor verbruikt namelijk een vrij groot vermogen. Het gebruik van een snelle DSP zou hier wel enigszins soelaas kunnen bieden. 3.Kostprijs Wegens de nood aan de krachtige processor zal dit een vrij dure oplossing worden. Het gebruik van een dergelijke processor is mogelijk indien voor een DSP implementatie wordt gekozen. De ontwikkeltools voor de SHARC en BLACKFIN DSP's zijn beschikbaar in het labo, waardoor deze oplossing zeker tot de mogelijkheden behoort Gesplitsthardwareensoftwareontwerp. De twee voorgaande ontwerpen waren zuivere hardware of software oplossingen. De twee laatste trachten een evenwicht tussen hard- en software te vinden. Bij het gesplitst hardware en software ontwerp wordt een eerste stap in vb. hardware uitgevoerd, gevolgd door een tweede stap die dan vb. in software uitgevoerd wordt. Onderstaande figuur geeft een voorbeeld van en mogelijk architectuur. Feedback Inkomende Gegevens Eerste Tweede verwerking verwerking (vb. Hardware) Gegevens (vb. Software) Uitgaande Gegevens Figuur 3.2: Gesplitst hardware en software ontwerp Een dergelijke aanpak heeft als voordeel dat beide delen slechts heel beperkt moeten interageren, waardoor dit een gescheiden ontwerp mogelijk maakt. Het grootste nadeel is dat de mogelijkheden qua opslitsing eerder beperkt zijn. 1.ComplexiteitenSnelheid Aangezien het hardware en software ontwerp opgeplitst wordt in twee verschillende delen, moet het nu ook als twee verschillende projecten bekeken worden. Idealiter wordt het opgesplitst zodoende dat het hardware ontwerp de meest rekenintesieve, maar (hopelijk) minder complexe, functies voor zich neemt. Het software ontwerp bevat nu de complexere zaken, die echter (hopelijk) minder rekenintensief zijn. Beide delen zouden haalbaar moeten zijn indien er 17
30 zich een wezenlijk complexiteitsverschil voordoet in delen van het systeem. Het zou vb. mogelijk zijn om de acquisitie in hardware uit te voeren daar deze echt realtime moet gebeuren, en zeer rekenintensief is. De volgende delen zouden dan in software kunnen uitgevoerd worden, daar deze zeker complexer zijn. Het is nu echter de vraag of het hardware ontwerp niet extreem complex wordt, terwijl de microprocessor toch nog heel snel moet zijn om de volledige demodulatie en decodering voor zich te kunnen nemen. 2.Kostprijs De ontwerpskost van een dergelijk systeem is vrij groot, omdat er twee volledig gescheiden functionele blokken ontworpen moeten worden. Ieder deel op zich moet getest kunnen worden qua functionaliteiten. Een groot voordeel van deze aanpak is dat hij vrij snel kan geïmplementeerd worden door twee verschillende personen wegens de mooie scheiding tussen de delen. De kostprijs van het uiteindelijke product is vrij moeilijk te bepalen, maar deze zal gelijkaardig zijn aan deze van een volledig software ontwerp. De microprocessor zal een stuk minder snel moeten zijn, waardoor deze een stuk goedkoper zal worden. Er komt echter een stuk hardware bij, waardoor de prijs niet gevoelig lager zal uitvallen Hardware/softwarecodesign Een tweede mogelijke hardware/software architectuur wordt gevormd wanneer men gezamenlijk de hard- en software ontwerpt. Het is mogelijk om een microprocessor uit te breiden met de nodige functionaliteiten, zoals in figuur 3.3 voorgesteld, om zodoende de benodigde verwerkingssnelheid te bekomen. Inkomende Gegevensstroom Hardware functie 1 Software Uitgaande Gegevensstroom verwerking Hardware functie 2 Hardware functie 3 Hardware functie 4 Figuur 3.3: Hardware/software codesign Deze aanpak heeft als groot voordeel dat geen complete functionele blokken in 18
31 hardware of software moeten uitgevoerd worden. Nu worden de meest processor intensieve functies versneld, waardoor de verwerkingssnelheid heel sterk kan stijgen. Het grootste nadeel van deze aanpak is dat men zo goed als verplicht wordt om een volledig FPGA of ASIC gebaseerd ontwerp te maken. Het is namelijk heel moeilijk om een standaard microprocessor te voorzien van heel snelle extra hardware functies, waardoor in deze situatie eigenlijk terug gevallen wordt naar het hardware/software gescheiden ontwerp. 1.Complexiteit De complexiteit van het systeem moet nu niet meer bekeken worden vanuit het standpunt van de complexiteit van de te implementeren taken. Het vertrekpunt is nu namelijk de beschikbare software, waarbij de delen die de meeste klokcycli vergen, in hardware opgevangen worden. Wat de complexiteit nu bepaalt, is de complexiteit van het ontwerpen van een dergelijk platform. Door middel van de beschikbare platformen voor FPGA ontwerp is deze piste zeker haalbaar. 2.Snelheid Op gebied van snelheid zou de hardware/software oplossing zeker haalbaar moeten zijn. Het is nu namelijk mogelijk om de meest rekenintensieve delen te vervangen door hardware, in tegenstelling tot het gescheiden hardware/software ontwerp, waar functionele gehelen volledig in hard- of software moeten gecreëerd worden. 3.Kostprijs Op gebied van kostprijs kan dit zeker een vrij kostefficiënte oplossing worden. De ontwerpskost wordt vrij laag gehouden door het hergebruik van de software, terwijl er geen snelle processor nodig is, zoals bij een zuivere softwareoplossing wel het geval is. Toch mag de complexiteit van een dergelijk ontwerp niet onderschat worden daar het samenspel tussen hard- en software altijd onverwachte problemen kan opleveren Conclusie Uit het voorgaande kan zeker al besloten worden dat een zuiver hardware oplossing zeker niet haalbaar is. Een zuivere software oplossing is een mogelijkheid, maar dan wordt het probleem eigenlijk herleid tot het herschrijven 19
32 van de beschikbare software naar een ander platform. Op een zware DSP zou het mogelijk moeten zijn om het volledige systeem draaiende te krijgen. Omdat er echter al een FPGA gebaseerde oplossing gekozen werd voor het ontvanger gedeelte van DRM-project, zou toch tenminste een gedeeltelijke hardware oplossing de voorkeur krijgen. Voor de eenvoud van implementatie werd in eerste instantie het gesplitste ontwerp gekozen. Dit is namelijk ideaal om met twee mensen te ontwerpen. Iedere persoon heeft zijn eigen deel, en de interactie tussen beide delen blijft relatief eenvoudig. Na het verdwijnen van mijn thesisgenoot halverwege november was dit voordeel plots volledig verdwenen, waarna ik overgeschakeld ben op de meest belovende route van hardware/software codesign. 3.3.Besturingssysteem Het nut van een besturingssysteem in een dergelijke applicatie moet zeker in vraag gesteld worden. Een besturingssysteem heeft een groot aantal voor- en nadelen, waardoor een enigszins gefundeerde beslissing rond het wel of niet gebruiken er van zeker geen overbodige luxe is. Na het overlopen van de voor- en nadelen is de logische vraag natuurlijk welk besturingssysteem best geschikt is voor deze toepassing Voor ennadelenvaneenbesturingssysteem Een besturingssysteem heeft een heel aantal voordelen voor zowel de ontwerper van een embedded systeem, als voor de eindgebruiker. Door het gebruik van een besturingssysteem kan de interactie met de gebruiker heel wat eenvoudiger geimplementeerd worden, waardoor meer tijd overblijft voor het ontwerp van een degelijke gebruikersinterface. Natuurlijk neemt het implementeren van een besturingssysteem in een embedded systeem ook heel wat tijd in beslag. Een heel belangrijk punt dat hierbij komt kijken is natuurlijk het uiteindelijk beoogde product. Hoe meer 'features' het uiteindelijke product heeft, hoe groter het voordeel van het gebruik van een besturingssysteem wordt. In de oorspronkelijke context dat vier verschillende thesissen op dit onderwerp plaatsnamen, was het vooropgestelde product een netwerkgeconnecteerde ontvanger die in staat was om via USB of IDE bepaalde uitzendingen op te nemen en terug af te spelen. Deze ontvanger moest volledig via het netwerk bediend kunnen worden. In een dergelijke context is het heel moeilijk om zonder een 20
33 besturingssysteem te werken, aangezien heel wat routinetaken zelf geïmplementeerd zouden moeten worden. Enkele voorbeelden hiervan zijn het gebruik van een harde schijf of een USB stick, netwerkfuncties, implementering van een webserver, multitasking,.... Een aantal besturingssystemen heeft al een hele rij aan beschikbare programma's, waardoor de functies die door deze programma's uitgevoerd worden eenvoudig beschikbaar zijn. Het toevoegen van extra functionaliteit in een later stadium wordt nu ook heel wat eenvoudiger omdat het DRM-ontvangstprogramma zelf niet meer aangepast moet worden eenmaal het draaiende is. Kortom, het systeem wordt heel wat flexibeler. Een besturingssysteem heeft natuurlijk ook zijn nadelen. Vooreerst moet het werken op de beschikbare hardware. Dit betekend dat de hardware tenminste twee hoofdbestanddelen nodig heeft: 1. Een werkgeheugen 2. Een processor waar het betreffende besturingssysteem op werkt Indien de hardware geschikt is voor het besturingssysteem, dan is de tweede vraag meestal hoe groot de impact is van het besturingssysteem op de vereiste hardware, of m.a.w. hoeveel wijzigt de benodigde hardware om het product te kunnen laten werken met een bepaald besturingssysteem t.o.v. zonder een besturingssysteem. Tenslotte moet men zich ook afvragen op welke manier met alle apparaten kan gecommuniceerd worden. Indien er telkenmale een nieuwe driver voor ieder apparaat geschreven moet worden, dan kan deze taak misschien evengoed gedaan worden zonder besturingssysteem Keuzevanhetbesturingssysteem Er zijn een aantal verschillende besturingssystemen beschikbaar voor het platform (Microblaze processor met 64MB DDR-RAM). uclinux Mentor Graphics Nucleus Express Logic ThreadX esol ultron4.0 RealFast AB Sierra RTOS Van deze verschillende besturingssystemen valt er onmiddellijk één besturingssysteem op, namelijk uclinux. uclinux moet eigenlijk gezien worden als een volwaardige Linux distributie voor embedded systemen. Dit houdt in dat dit een enorm gamma programma's bevat die in embedded systemen bruikbaar 21
34 kunnen zijn. Het grootste verschil zit hem in de kernel. Deze is namelijk gepatcht om op processoren te werken die geen MMU1 (Memory Management Unit) bezitten. De Dream-software werkt in Linux, waardoor verwacht wordt dat het porten van de Dream-software naar uclinux veruit het gemakkelijkst zal verlopen in vergelijking met de andere besturingssystemen. Tijdens een verdere studie van uclinux kwamen de onderstaande voordelen aan het licht: Beschikbare drivers voor alle Xilinx IP cores: GPIO, FSL, Xilinx ethernet, Xilinx ethernetlite, Xilinx uartlite Groot aantal drivers voor een heel breed gamma aan extra hardware: flash, memory technology devices, usb apparaten, bedraad en draadloos netwerk, IDE-controllers,... Enorm groot aantal applicaties zoals: shells, webservers, streaming servers, bestandsbeheer, debugger,... Mogelijkheid tot het gebruik van netwerkmappen. Dit vereenvoudigt de opslag van gegevens sterk. Vrij klein hoofdgeheugen benodigd. uclinux met een webserver op een microblaze werkt met een hoofdgeheugen van 1MB groot. Dual stage bootloader beschikbaar voor de microblaze processor uclinux wordt in een héél groot aantal hardware apparaten gebruikt zoals netwerk geconecteerde camera's, AP's, NAS,... Het heeft een GPL licentie, net zoals de Dream-software Alle benodigde functies voor het vooropgestelde product zijn aanwezig in uclinux. Deze functies, samen met het 'open source' karakter van uclinux, hebben er voor gezorgd dat de keuze voor uclinux snel gemaakt was. De implementatie van uclinux op een microblaze processor heeft enkele specifiek kenmerken wegens het extreem aanpasbaar zijn van deze processor. Hierdoor werd er een speciale versie, genaamd Petalinux, van uclinux ontworpen. Deze versie heeft als doel om het gebruik van uclinux zo eenvoudig mogelijk te maken. Petalinux is eigenlijk niets meer dan uclinux, vergezeld van een aantal scripts en een heel wat verbeterde compiler dan deze meegeleverd bij Xilinx EDK. Deze verbeterde versie is nodig omdat de compiler die in Xilinx EDK aanwezig is een aantal gebreken vertoont. Ten eerste is de C++ ondersteuning van deze compiler heel beperkt. Hij slaagt er in een standaard 'hello world' 1 Meer informatie hierover in hoofdstuk 5 22
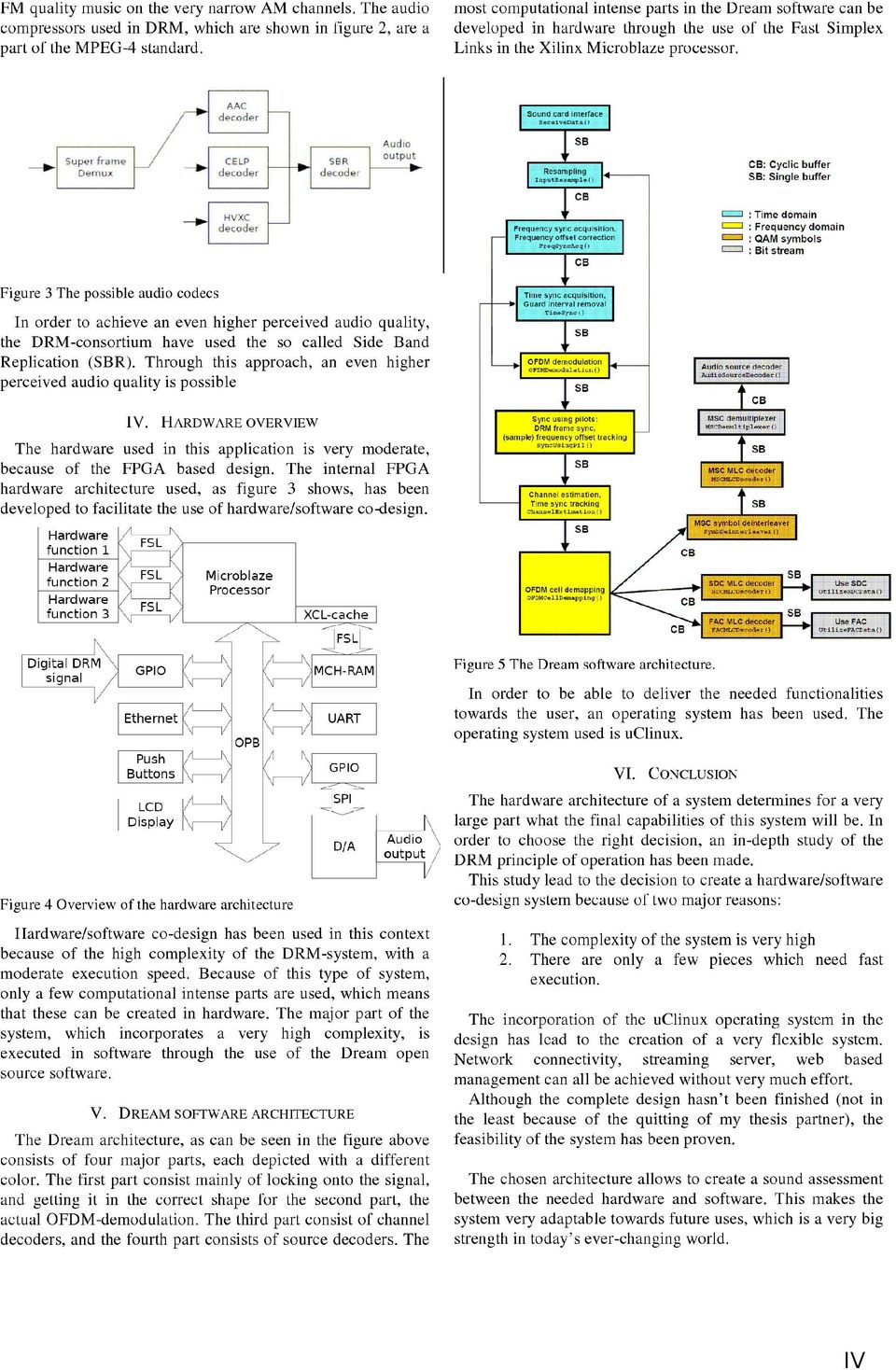
35 programma te compileren, maar daar blijft het ook bij. Er is zeker al geen ondersteuning voor namespaces, andere gebreken werden niet verder onderzocht. Als tweede gebrek is het niet mogelijk om via deze compiler PIC code te genereren (Zie hoofdstuk 5.3.5). De versie in Petalinux heeft deze gebreken niet meer. 3.4.Hardwareoverzicht De gekozen architectuur kan nu in een concrete vorm gegoten worden, zoals hieronder weergegeven. Hardware functie 1 Hardware functie 2 Hardware functie 3 FSL FSL Microblaze Processor FSL XCL-cache FSL Digitaal DRM signaal GPIO MCH-RAM Ethernet UART OPB Druk knoppen LCD Display GPIO SPI D/A Audio uitgang Figuur 3.4: Het volledige hardware overzicht Het digitale DRM signaal wordt binnengenomen via een GPIO interface met DMA controller, waardoor de gegevens niet doorheen de processor moeten verplaatst worden naar het geheugen. De gegevens worden daarna via de XCL-cache uit het hoofdgeheugen gelezen, waardoor de OPB-bus niet extra belast wordt. Nadat de verwerking voltooid is, kan de audio via een tweede gpio interface naar een D/A convertor gestuurd worden. Het grootste nadeel van deze architectuur is dat er geen DMA-controllers bestaan voor FSL-links. Hierdoor moeten alle gegevens die naar de hardware functies gestuurd moeten worden doorheen de processor. 23
36 4.Opbouwvanhethardwareplatform 4.1.Inleiding De hardware voor deze scriptie kan eigenlijk op twee verschillende manieren bekeken worden. Een eerste manier is de echte hardware, die bestaat uit het spartan 3E starter bord en hoofdzakelijk de volgende componenten bezit: Xilinx Spartan XC3S-500E Xilinx platform flash 64MB ram 16MB parallel flash LAN PHY (SMSC LAN83C165) LCD display Enkele drukknoppen, schakelaars en leds Connectoren: RJ-45, twee Seriële poorten, PS/2, VGA Hierin is het FPGA de kern van het geheel, waar alles rond gebouwd wordt. Een tweede en in deze scriptie meest belangrijke manier, is te kijken naar de hardware die gebouwd wordt in het FPGA. Het basisprincipe voor het ontwerpen van hardware waarop een besturingssysteem moet draaien, is dat het besturingssyteem de minimaal vereiste hardware bepaalt. Eenmaal aan deze eisen voldaan, is de ontwerper vrij om de extra benodigde functionaliteiten te voorzien die het product zijn uiteindelijke vorm zullen geven. Wegens de flexibiliteit van het FPGA-ontwerp betekent dit hoofdzakelijk dat er constant hardware en software moet afgewogen worden tegenover elkaar. Bij een heel grote complexiteit verdient software de voorkeur, aangezien deze heel eenvoudig met grote complexiteiten om kan gaan. Bij een heel grote snelheidsvereiste verdient hardware meestal de voorkeur, daar deze sterk geparallelliseerd kan werken. 4.2.Minimaleeisenvanhetbesturingssysteem Het uclinux besturingssysteem heeft nood aan een aantal fundamentele hardware elementen. Deze zijn: Een processor Een hoofdgeheugen (Best groter dan 1 MB) 24
37 Timer met IRQ Een vorm van gebruikersinterface Deze eisen lijken heel eenvoudige eisen. Een standaard besturingssysteem stelt echter heel wat hogere eisen aan de basis hardware. Een klein voorbeeld: een standaard Linux kernel heeft nood aan een processor die minimaal een volledige Memory Management Unit (MMU)2 bezit. Een MMU is echter niet beschikbaar in de Xilinx microblaze processor. Indien er dus gewenst zou zijn dat een standaard Linux kernel moet werken op het systeem, dan is een processor met een MMU (powerpc op virtex, openrisc,...) een noodzaak. Het hoofdgeheugen dat groter moet zijn dan 1MB is ook relatief klein. Zeker aangezien het bord al 64MB geheugen bezit, en de Dream-software er zeker enkele megabyte nodig heeft. Een timer met een IRQ (Interrupt Request) kan men heel snel vergeten. Dit lijkt niet echt noodzakelijk op een basis systeem, maar dat is het wel. uclinux kan werken zonder enige gebruikersinterface, maar dan is het nut van het besturingssysteem natuurlijk heel gering. Op dit bord kan serieel of via netwerk een gebruikersinterface aangeboden worden. 4.3.Bouwenvandebasishardware De minimale hardware eisen van het besturingssysteem zoals hoger vermeld zijn heel beperkend naar een praktisch ontwerp toe. Om een degelijk ontwerpplatform te bouwen zijn nog een aantal extra onderdelen nodig, die het mogelijk maken om een dergelijk systeem eenvoudig te kunnen aanpassen en beheren. Een eerste benodigd blok is tenminste één Universal Asynchronous Receiver Transmitter (UART). Deze kan door het besturingssysteem als standaard input en output poort gebruikt worden. Een tweede blok is een Microblaze Debug Module (MDM). Deze maakt het mogelijk om een aantal debug taken uit te voeren zoals: De processor te stoppen De processor te doen starten vanaf een bepaald geheugen adres Geheugen operaties uitvoeren Breakpoints instellen De hardwareblokken zijn echter niet zomaar bruikbaar. Intern in de FPGA moeten de verschillende blokken op een correcte manier met elkaar verbonden worden. Externe blokken (zoals RAM, seriële poort, LAN phy, flash geheugen,...) moeten 2 Hier wordt in hoofdstuk 5.2 dieper op ingegaan 25
38 echter ook correct verbonden worden met de interne delen. Er moet dus een pin mapping gebeuren tussen externe FPGA pinnen en interne signalen. Dit is een vrij eenvoudige klus, waarbij echter heel snel fouten gemaakt kunnen worden. Om dergelijke problemen te vermijden werd de Base System Builder (BSB) ontworpen. De BSB heeft een groot gamma aan standaard bord layouts. Deze weet dus hoe de externe pinnen gemapt moeten worden naar de interne signalen. Tevens kan de BSB de verschillende interne blokken automatisch koppelen aan de OPB-bus (On-Chip Peripheral Bus). Deze taak is opnieuw vrij eenvoudig. Toch zou heel snel een fout gemaakt zou kunnen worden. Tenslotte kan de BSB ook een aantal instellingen maken voor de verschillende delen van het systeem, zoals het inschakelen van een IRQ bij een timer, of de baudrate van een seriële poort,... Het opbouwen van het basissysteem wordt in appendix B uitgebreid besproken. De belangrijkste instellingen die moet gemaakt worden zijn de volgende: HW-debug module gebruiken Tenminste één uart instellen op UARTLITE, en de interrrupt inschakelen Bij IO-devices de Flash16Mx8 inschakelen Bij ethernet_mac de opb_ethernetlite gebruiken. Opnieuw de interrupt inschakelen. Een timer toevoegen met een counter width van 32 bit, slechts één timer beschikbaar en interupt ingeschakeld. Na het maken van deze instellingen wordt de basishardware, zoals in figuur 4.1 wordt weergegeven, bekomen. Dit ontwerp heeft een aantal problemen zoals: Het ontbreken van cache geheugen Alle geheugenbewerkingen moeten via de OPB-bus De debug link is traag Zonder deze aanpassingen is het onmogelijk om de Dream-software snel genoeg te laten werken. Hiervoor moeten nog een aantal aanpassingen gedaan worden, zoals in hoofdstuk 4.4 beschreven. 26

39 Figuur 4.1: Overzicht van de basis hardware voor het uclinux besturingssysteem 27
40 4.4.Hardwareverbeteringen De voorgaande architectuur is rechtstreeks te verkrijgen door de BSB wizard. Deze architectuur is echter niet optimaal om een besturingssysteem op te laten werken. Er kunnen nog heel wat verbeteringen aangebracht worden Cachegeheugen OPB bus Processor OPB cache RAM Flash GPIO Figuur 4.2: OPB cache architectuur Tijdens de BSB-wizard wordt de optie tot het gebruik van cache aangeboden. Er zijn twee soorten cache-geheugen beschikbaar. Een eerste is de OPB-cache, zoals in figuur B.6 weergegeven. Deze cached alle gegevens die tussen de processor en apparaten op de OPB-bus uitgewisseld worden. Indien gegevens van een heel traag apparaat zoals flash in de cache aanwezig zijn, dan kan dit een heel grote snelheidswinst opleveren bij het lezen van die gegevens. Het soort applicatie bepaalt echter heel sterk in hoeverre de gegevens in cache aanwezig zullen zijn. Het grote nadeel van deze cache architectuur is dat de cache enkel beschikbaar is via de OPB-bus. Dit is een relatief trage bus, en wordt tevens door alle apparaten gebruikt. Indien een traag apparaat, aanwezig op de bus, gegevens verzent, dan is de cache niet beschikbaar. De tweede soort is de Xilinx Cache Link (XCL), die gebruik maakt van een Fast Simplex Link (FSL). Een FSL-link is een rechtstreekse Master-Slave verbinding tussen twee devices. De FSL link bevindt zich, zoals in figuur 4.3 weergegeven, tussen de XCL-cache en OPB bus Processor XCL cache FSL RAM Flash GPIO Figuur 4.3: XCL cache architectuur 28
41 het RAM-geheugen, waardoor het enkel mogelijk is om het RAM-geheugen te cachen. Deze aanpak maakt het nu echter mogelijk om het hoofdgeheugen te lezen (en te schrijven) zonder dat deze gegevens over de OPB bus moeten. Hierdoor wordt de OPB bus ontlast, en wordt de data een heel stuk sneller geleverd aan de processor. Het grootste nadeel is dat het RAM geheugen nu een Multi Channel Host (MCH) interface nodig heeft. De Dream-software bepaalt voor een heel groot deel welke cache-architectuur het meest geschikt is. De Dream-software moet een heel groot aantal repeterende bewerkingen doen op relatief traag binnenkomende samples (40 Ksps). Hierdoor zal het nut van een heel snelle cache tussen het geheugen en de processor veruit het meeste voordeel bieden. M.a.w. de XCL-cache architectuur is beter geschikt voor de deze toepassing Klokfrequenties Het FPGA heeft vier zogenaamde Digital Clock Manager (DCM) hardware blokken. Door middel van deze blokken is het mogelijk om een externe oscillatorfrequentie te vermenigvuldigen en delen. Ze laten het toe om de processor en geheugenklok aan te passen en ze te optimaliseren voor de benodigde toepassing. Tijdens het uitvoeren van de BSB-wizard worden drie DCM-blokken gebruikt zoals in figuur B.8 weergegeven, om het volledige systeem van hun benodigde klokken te voorzien. De standaardklok, op het bord aanwezig, heeft een frequentie van 50Mhz. Dit is de ext_clk in figuur B.8. Deze klok wordt door DCM_0 verdeeld. de clkfx uitgang heeft een frequentie die instelbaar is (Bij een keuze van 75Mhz wordt deze door de BSB-wizard ingesteld op 3/2 maal de ingangsfrequentie). De clkfx-uitgang wordt gekoppeld aan de klok van de OPB-bus. Dit houdt in dat zo goed als het volledige systeem deze klok als hoofdklok zal gebruiken. De grootste uitzondering hierop is het MCH_OPB_DDR-blok. Deze heeft twee klokcircuits nodig. Het ene klokcircuit is het volledige deel naar de processor toe (OPB- en FSL-verbindingen). Het tweede klokcircuit bestaat uit de volledige aansturing van het DDR SDRAM geheugen. De RAM draait immers op een andere frequentie dan de interne componenten. Standaard wordt er in de BSB-wizard voor gekozen om de RAM te laten draaien op twee maal de frequentie van de externe klok. Deze bedraagd dus 100 Mhz. Het geheugen IC bestaat echter uit DDR333-geheugen. D.w.z. dat dit geheugen op 166 Mhz optimaal werkt. Standaard wordt dit niet 29
42 gedaan omdat er dan nood is aan een extra DCM. DCM_0 gnd ext_clk 50Mhz rst Locked clk_in 75Mhz clkfx 100Mhz clk2x clk90 FB clk0 UART DCM_2 rst Locked clk_in clkfx clk2x clk90 FB clk0 rst Locked clk_in clkfx clk2x clk90 FB clk0 MCH_OPB_DDR OPB BUS ublaze DCM_1 ddr_clk_90 dev_clk_90 dev_clk DDR_RAM clk_fb GPIO ddr_clk_90_n dev_clk_90_n dev_clk_n Figuur 4.4: De standaard klok distributie architectuur De externe klok van het uiteindelijke systeem zou echter op 80Mhz werken. Om een controle van het systeem toe te laten zou het mogelijk zijn om nog een extra DCM tussen de externe klok en DCM_0 te plaatsen. Hiermee kan de externe klok van 50Mhz intern gewijzigd worden naar 80Mhz om zodoende een identieke situatie te bekomen. In deze situatie draait het geheugen dan op 160Mhz, wat al heel wat sneller is. Wegens routingproblemen blijkt het echter niet te lukken om een vierde DCM te gebruiken. Een alternatieve oplossing is natuurlijk om een externe klok van 80Mhz te gebruiken op het bord. Indien de externe klok een andere frequentie dan 50 Mhz bezit, moet er op gelet worden dat de timinginstellingen van de volgende apparaten aangepast worden, om de correcte werking ervan te kunnen garanderen. MCH_OPB_DDR De CAS vertragingstijd moet correct ingesteld worden op drie, en de OPB bus periode moet gewijzigd worden in de correcte waarde (Bij 80Mhz wordt dit 12500ps). De andere timing instellingen mogen constant blijven, aangezien deze in pico seconden ingesteld worden. (Bij CAS = 3 wil dit zeggen dat er drie klok cycli gewacht wordt, waardoor de tijdsvertraging 30

43 varieert bij wijzigende klokfrequentie). UART Bij de UART moet de OPB-bus frequentie correct ingesteld worden. Een verkeerde instelling leidt tot een aantal niet leesbare tekentjes die zichtbaar worden op de console tijdens het opstarten van het platform Snelledownloadverbinding Het ontwerp van een dergelijk systeem vergt heel wat debug-werk. Hierdoor is een snelle verbinding om het systeem te kunnen debuggen zeker geen overbodige luxe. Een snelle debug-verbinding bestaat uit een FSL-link tussen de debug module en een ublaze FSL-poort. 1. De eerste stap is het toevoegen van een FSL-verbinding. Na het toevoegen ervan wijzigt men best de naam van deze verbinding naar een meer logische naam zoals download_link. Figuur 4.5: Toevoegen van een FSL IP core 2. De volgende stap is het inschakelen van de ublaze FSL-link. Deze wordt ingesteld in het tabblad 'bus interfaces' van de ublaze-processor. Hier moet één FSL link ingesteld worden met een FSL data breedte van 32 bit. 3. In de debug_module moet de 'Enable Fast Download Write Port' op 1 geplaatst worden. 4. De MFSL0 poort van de debug_module en de SFSL0 poort van de microblaze processor moeten nu gekoppeld worden aan de download_link 31

44 Figuur B.10 toont hoe de debug module aan de ublaze-processor wordt gekoppeld d.m.v. de download_link FSL-verbinding. Figuur 4.6: De afgewerkte FSL verbinding tussen de debug module en de ublaze-processor 4.5.uClinuxspecifiekeinstellingenvoorhethardwareproject Nu de belangrijkste elementen van het hardware project vastgelegd werden, moet de koppeling tussen het hardware project en het latere software project voorzien worden. Deze koppeling is nodig om het mogelijk te maken om automatisch de benodigde instellingen door te geven aan het besturingssysteem. Hierdoor kan het besturingssysteem automatisch alle juiste instellingen ter compilatie en uitvoering meekrijgen. Tot nog toe was het besturingssysteem waarop Xilinx EDK en ISE stonden niet belangrijk. De procedures waren identiek voor zowel Windows als Linux. Vanaf dit punt wordt het ten sterkste aangeraden om op een Linux platform te werken. Deze stap is ook mogelijk op een Windows platform, maar maakt dat de complexiteit heel sterk stijgt. Allereerst moet er voor gezorgd worden dat de Petalinux-omgeving correct geïnstalleerd wordt3. Nadat deze correct geïnstalleerd werd, volstaan de stappen, 3 Zie appendix A 32
45 nader uitgelegd in appendix C, om het hardwareproject correct voor te bereiden. Door het uitvoeren van deze stappen worden twee belangrijke dingen verkregen: 1. De koppeling tussen het hardware en software project wordt mogelijk. 2. De FS-boot bootloader wordt in de processor geplaatst. De koppeling tussen het hardware en het software platform wordt gemaakt door middel van het zogenaamde auto-config.in bestand. Dit bestand bezit een heel aantal instellingen van het harware platform, waarvan de belangrijkste zijn: De locatie en de grootte van het hoofdgeheugen. Zonder deze instellingen kan de uclinux kernel niet opstarten, aangezien de uclinux geen idee heeft waar dit geheugen zich bevindt en hoe groot het is. De locatie en de grootte van het flash geheugen uclinux kan opstarten zonder deze informatie. De firststage bootloader, FSboot heeft echter wel nood aan deze informatie. FS-boot moet namelijk de secondstage bootloader vanuit flash laden in het geheugen. Zonder deze gegevens kan dit onmogelijk voltooid worden. De instellingen van de microblaze processor De belangrijkste instelling zijn geactiveerd coprocessor elementen, zoals de Floating Point Unit, de hardware integer multiplier/divider, barrel shifter,.... Deze instellingen zijn heel belangrijk naar de compiler toe. Deze moet deze instellingen weten, om zodoende alles te compileren naar de juiste hardware. Een aantal instellingen voor randapparatuur zijn benodigd voor de respectievelijke drivers. Zo heeft de UARTLITE, en de Ethernetlite driver nood aan een aantal van deze instellingen. Vanaf nu is het mogelijk om op het hardwareplatform een uclinux te laten werken. Praktisch gezien is het platform echter nog niet echt bruikbaar wegens het ontbreken van een bootloader. Zonder deze bootloader moet men telkenmale men het systeem inschakelt eerst manueel de uclinux image doorsturen naar het geheugen via de debug-interface en daarna opstarten vanaf geheugen. De ublaze processor start namelijk altijd op vanaf geheugen adres 0x Dit bevind zich standaard in het BRAM geheugen in het FPGA. Omdat dit BRAM geheugen slechts heel beperkt is in grootte (Slechts 8kB data en 8kB instructies!) is een bootloader absoluut noodzakelijk. 33
46 5.Microblaze uclinux 5.1.Inleiding In hoofdstuk drie werd als besturingssysteem uclinux gekozen. De grootste reden waarom er een standaard Linux op de beschikbare hardware niet werkt is het ontbreken van een Memory Management Unit in de microblaze processor. In deel twee van dit hoofstuk zal verder ingegaan worden op de gevolgen van het ontbreken van een MMU op een besturingssysteem. De oplossingen voor deze problemen die aangeboden worden door uclinux worden er ook nader in behandeld. Deel drie van dit hoofdstuk handelt over de compilatie van uclinux voor een microblaze processor. Hierna wordt meer informatie verschaft, waardoor een volledig zelfstandig werkend bord mogelijk wordt. 5.2.M emory M anagementunit(mmu) Het grootste verschil tussen Linux en uclinux zit hem in het ontbreken van een MMU. Vandaar dat het naderbij bekijken van de functionaliteiten die geboden worden door een MMU zeker geen overbodige luxe is WatiseenMMU?[3] Een MMU is het deel van een processor waarvan de taak er hoofdzakelijke in bestaat een vertaling te maken tussen logische adressen en fysieke adressen. In een standaard 32-bit PC is het namelijk zo dat ieder programma op zich een virtuele adresruimte van 32-bit (= 4GB) beschikbaar heeft. In werkelijkheid is het echter niet zo dat het fysieke geheugen een dergelijke omvang heeft, laat staan dat dit voor ieder programma zou moeten verwezenlijkt worden. 34
47 Er zijn een aantal redenen waarom dit in bijna alle PC's gedaan wordt: 1. Huidige PC's hebben een hoofdgeheugen dat meestal kleiner is dan wat de mogelijke adresseringsruimte beschikbaar maakt. Indien een proces echter meer virtueel geheugen nodig heeft dan hetgeen vrij is in het fysiek beschikbare geheugen, kan de MMU hier een oplossing voor bieden. Deze maakt het zogenaamde swappen mogelijk. Tijdens het swappen worden niet benodigde gegevens naar schijf weggeschreven, terwijl de op dit ogenblik benodigde gegevens vanaf schijf gelezen worden en in het geheugen geplaatst worden. Het swappen is volledig onzichtbaar voor de applicatie, tenzij op het gebied van uitvoeringssnelheid. 2. Indien er een proces uitgevoerd wordt, dan heeft dit een bepaalde hoeveelheid geheugen nodig. Bij een systeem met een MMU heeft een proces altijd een volledig virtueel geheugen beschikbaar voor zichzelf. Dit betekent dat dit proces alles kan doen met deze geheugenruimte zonder dat andere processen hierdoor rechtstreeks beïnvloed worden. Het proces hoeft dus geen rekening te houden met wat andere processen uitvoeren. 3. Indien een proces in uitvoering extra geheugen nodig heeft, dan kan dit ergens in het virtueel geheugen gealloceerd worden. Aangezien er slechts één proces in dit virtueel geheugen aanwezig is, is de kans dat er geen geheugenblok van de gewenste grootte beschikbaar is zo goed als onbestaande. De programmeur van de betreffende softwareapplicatie heeft dit trouwens volledig in de hand en kan dit voorkomen mocht dit toch gebeuren. In het fysiek geheugen kan de MMU een heel aantal verschillende geheugenblokken (zelfs swap geheugen) samennemen om het benodigde virtueel geheugen beschikbaar te maken. Het proces hoeft niet bewust te zijn van de samenhang van het fysieke geheugen ProbleempuntenbijhetontbrekenvaneenMMU?[4] Het ontbreken van een MMU betekent dat alle processen rechtstreeks in het fysieke geheugen lopen. De grootste problemen die hieruit voortvloeien worden hieronder beschreven. 1.Reallocatieteruitvoeringvanhetproces Zonder een MMU lopen alle processen in dezelfde geheugenruimte. Dit wil zeggen dat ieder proces vanaf een ander geheugenadres moet starten. Bij het 35
48 uitvoeren van een willekeurig process wil dit zeggen dat het eerst moet gerealloceerd worden naar een bepaalde aaneensluitende geheugenruimte, van waaruit de uitvoering gestart kan worden. Deze taak is echter niet rechtstreeks merkbaar voor de programmeur, maar hij moet wel in het achterhoofd houden. vb. Een programma staat op een RAM-bestandsysteem. Dit bestandsysteem heeft dit programma gesplitst in twee delen. Bij een systeem met een MMU kan dit rechtstreeks uitgevoerd worden. Bij een systeem zonder MMU moet dit programma eerst gerealloceerd worden vooraleer het kan uitgevoerd worden. Hierdoor zal het geheugengebruik verdubbeld worden t.o.v. een systeem met een MMU. Een alternatief van reallocatie is echter wel mogelijk indien de compiler Position Independant Code (PIC) kan genereren (zie lager). 2.Stackgeheugen Aangezien verschillende processen na elkaar in de geheugenruimte kunnen geplaatst worden, volgt daar uit dat een proces niet zomaar zijn geheugenruimte kan uitbreiden. Hieruit volgt dat de programmeur op voorhand de grootte van zijn proces moet kunnen bepalen. Dit is vb. een heel groot nadeel voor de stack, die dynamisch kan groeien gedurende de levensduur van het proces. Indien de stack te groot wordt, dan wordt dit normaal opgevangen door de MMU, die een nieuw blok stackgeheugen toekent. Indien de stack nu te groot wordt, dan bestaat de kans dat gegevens overschreven worden. 3.Geheugenprotectie Het gebruik van één globale geheugenruimte betekent ook dat indien een proces buiten zijn geheugenruimte gaat, dit rechtstreeks een ander proces kan beïnvloeden, met de volgende drie mogelijke gevolgen: Het extra geheugen wordt niet gebruikt door een ander proces of de kernel. Dit leidt tot het correct functioneren van het volledige systeem. Er is echter geen garantie dat deze situatie zich altijd zal blijven voordoen. Het extra geheugen wordt gebruikt door een andere programma of door de kernel en het systeem crasht. Het extra geheugen wordt gebruikt door een ander proces. Hierdoor zal dit andere proces misschien blijven lopen, maar verkeerd functioneren. Dergelijke fouten zijn extreem moeilijk te vinden, aangezien deze slechts onder bepaalde voorwaarden zullen ontstaan, en daardoor heel moeilijk 36
49 traceerbaar zijn. 4.Wisselgeheugen Het gebruik van wisselgeheugen wordt onmogelijk door het ontbreken van een MMU. Bij embedded systemen levert dit echter meestal niet al te veel problemen, daar er slechts een beperkt aantal processen moeten draaien. Hierdoor is het benodigde geheugen meestal vrij constant. 5.3.uClinuxversusLinux[4] uclinux heeft een aantal technieken die het mogelijk maken om op een systeem zonder MMU te werken. Hierdoor zijn er een aantal verschillen waar een programmeur rekening mee moet houden bij het programmeren of porten van een programma voor uclinux Geheugenbeheer In een standaard Linux kernel wordt het geheugen toegekend via een macht van twee allocator. Dit houdt in dat het aangevraagde geheugen altijd omhoog afgerond wordt naar een waarde die een macht van twee is. Hierdoor kan er bij grote geheugenaanvragen heel veel geheugen onnodig gealloceerd worden (vb. 1,1MB vragen => 2MB krijgen). Bij embedded systemen is het beschikbare geheugen echter heel beperkt, waardoor een dergelijke allocatie problemen kan opleveren. Een tweede probleem dat ontstaat, is dat het geheugen gefragmenteerd kan raken. Hierdoor kan het mogelijk zijn dat het beschikbare geheugen vb. 5MB bedraagt, en dat een geheugenaanvraag van 3MB een out-ofmemory fout teruggeeft. Om het geheugengebruik efficiënter te laten verlopen is er een alternative geheugenallocator ontwikkeld voor uclinux. Deze kent het geheugen toe in machten van twee zolang de geheugenaanvraag kleiner is dan één geheugenpagina (4KB). Bij een waarde groter dan één pagina alloceert hij het geheugen per pagina. Het fragmentatieprobleem wordt gedeeltelijk opgelost door het toekennen van grote geheugenaanvragen aan de bovenzijde van het geheugen, terwijl het toekennen van kleine geheugenaanvragen aan de onderzijde van het geheugen gebeurt. Het gebruik van deze geheugenallocator heeft echter wel een iets tragere toekenning tot gevolg. 37
50 5.3.2.Stackgeheugen Zoals hoger beschreven kan een stack groeien en krimpen gedurende de uitvoer van een programma. Aangezien de stack binnen het proces opgeslagen wordt, kan deze maar tot aan een bepaalde maximale waarde groeien. Op standaard Linux wordt dit opgevangen door de MMU die de stack virtueel uitbreidt. Bij uclinux is dit echter niet mogelijk. Om deze tekortkoming te vermijden, moet er tijdens de compilatie een plaats vrijgemaakt worden die groter is dan de maximale grootte van de stack Malloc Malloc in zijn gewone vorm is niet bruikbaar, aangezien deze steunt op het feit dat het systeem met virtueel geheugen werkt. Malloc moet nu echter geheugen toekennen dat in het fysieke geheugen beschikbaar is. In uclinux wordt dit opgevangen door al het vrije kernelgeheugen beschikbaar te maken. De uclinux malloc implementatie moet nu aan de kernelgeheugenallocator het benodigde geheugen vragen. Het grote voordeel is dat er geen geheugen verspild wordt, in tegenstelling tot een vaste maximale grootte, zoals vb. bij de stack gebruikt wordt. Het grote nadeel is dat een programma nu wel alle geheugen van het volledige systeem kan innemen, wat meestal tot een systeemcrash zal leiden forkenvfork De fork() systeemaanroep [5] maakt een exacte kopie van het huidige proces, op de proces ID na. Het huidige proces wordt dan het 'parent' proces en het nieuwe proces het 'child' proces. Na het uitvoeren van een fork() opdracht werkt het 'child' proces volledig zelfstandig verder in zijn eigen geheugenruimte. Deze geheugenruimte is initieel een exacte kopie van de geheugenruimte van de 'parent'. Het 'parent' en het 'child' proces kunnen nu volledig parallell werken. De vfork() systeemaanroep [6] heeft twee grote verschillen met de fork() systeemaanroep. Het 'child' proces dat gecreëerd wordt draait op dezelfde geheugenruimte van de 'parent'. Dit betekend dat de geheugenruimte niet gekopieerd hoeft te worden. Omdat het 'child' proces op dezelfde geheugenruimte werkt, wordt het 'parent' proces wel geblokkeerd gedurende de uitvoering van het 'child' proces. In uclinux is fork() niet beschikbaar [4] omdat het onmogelijk is om een exacte 38
51 kopie van het proces te maken aangezien deze in dezelfde fysieke geheugenruimte lopen. vfork() is wel beschikbaar omdat vfork() het parent proces doet pauzeren. Zodoende kan het child proces verderwerken op dezelfde fysieke locatie. Let wel op dat vfork effectief de data en het geheugen van de 'parent' gebruikt! flatuitvoerbarebestanden In standaard Linux is het bestandsformaat voor uitvoerbare bestanden ELF. Dit is niet bruikbaar in uclinux, omdat het ELF formaat gebruik maakt van het virtueel geheugen. uclinux gebruikt het FLT bestandsformaat, dat in twee verschillende versies beschikbaar is. Het volledig realloceerbaar formaat, en het PIC formaat. In het volledige realloceerbaar formaat moet het uitvoerbare bestand eerst gekopieerd worden in het RAM geheugen vooraleer het kan uitgevoerd worden. Het PIC formaat laat toe om de instructies onmiddellijk uit te voeren en enkel de data naar het geheugen te kopiëren. Dit is het zogenaamde execute In Place (XIP), waardoor er slechts een heel beperkte hoeveelheid RAM geheugen nodig is. Een nadeel hiervan is echter wel dat indien het bestand in vb. flash staat, het slechts vrij traag zal uitgevoerd kunnen worden. Een tweede nadeel is dat het onderliggende bestandssysteem het programma niet mag fragmenteren. Indien dit wel gedaan wordt, dan is XIP ook niet meer mogelijk. Het enige bestandsformaat dat momenteel bruikbaar is dat bestanden niet fragmenteert is ROMFS. In het flat formaat wordt de stackgrootte ingesteld. Deze kan vrij eenvoudig gewijzigd worden op één van volgende manieren: 1. 'FLTFLAGS = -s <stackgrootte>' en 'export FLTFLAGS' toevoegen aan de makefile 2. microblaze-uclinux-flthdr -s <stackgrootte> programmanaam uitvoeren na het compileren Het flat formaat ondersteunt ook een compressie modus, dewelke opnieuw in twee versies komt. Een eerste versie is het volledig gecomprimeerde formaat, en wordt als volgt bekomen: microblaze-uclinux-flthdr -z bestandsnaam In de tweede versie wordt enkel de data gecomprimeerd, waardoor XIP nog steeds mogelijk is. Een dergelijk bestandsformaat wordt als volgt bekomen: microblaze-uclinux-flthdr -d bestandsnaam 39
52 5.3.6.Gedeeldeb ibliotheken Echte gedeelde bibliotheken zijn in een systeem zonder MMU enkel mogelijk indien XIP ondersteund wordt. Indien dit niet het geval is, is het wel nog steeds mogelijk om gedeelde bibliotheken aan te maken. Tijdens het gebruik van een dergelijke bibliotheek wordt er telkenmale deze benodigd is een kopie van gemaakt. Hieruit volgt dat het gebruik van een statische bibliotheek voordeliger is aangezien deze niet gekopieerd moet worden tijdens de uitvoering. 5.4.OpzettenvanhetuClinuxplatform Het compileren van uclinux is op zich vrij eenvoudig geworden door het ontstaan van de Petalinux distributie. Het is echter noodzakelijk om de omgeving correct in te stellen, zoals in appendix A uitgelegd wordt. Het compilatieproces bestaat hoofdzakelijk uit drie delen. Het eerste deel is het afwerken van het hardware platform, gevolgd door de link maken tussen het hardware en software platform. Dit wordt uitgebreidt uitgelegd in appendix C. Het laatste deel is de instelling en compilatie van de software. Na het voltooien van deze stappen wordt het systeem op het testbord geplaatst Software instellingen Nadat het hardwareplatform gekoppeld werd aan het softwareplatform kan het softwareplatform ingesteld worden. De in te stellen parameters worden in alle figuren correct weergegeven om een werkend systeem te bekomen. De extra uitleg verklaart de belangrijkste keuzes die gemaakt kunnen worden. De instellingen worden ingedeeld in drie grote delen. Het eerste deel behandelt de globale instelling, en werd door Petalogix toegevoegd om de globale configuratie van uclinux eenvoudiger te maken. Het tweede deel zijn de kernel instellingen. Deze bepalen alle beschikbare kernel functies, en zijn uiterst belangrijk om het systeem draaiende te krijgen. Het derde deel zijn de user instellingen. Deze bepalen welke programma's het uiteindelijke systeem zal bevatten. De zelf gemaakte programma's zijn hier standaard echter niet bij. Petalogix heeft deze namelijk in een volledig aparte structuur gegoten. Het is echter wel mogelijk om een zelfgemaakt programma in deze configuratie te plaatsen, waarvoor verwezen wordt naar de $PETALINUX/software/petalinux-dist/Documentation map. 40
53 1.Globaleinstellingen De softwareplatformconfiguratie wordt geopend als volgt: cd $PETALINUX/software/petalinux-dist make menuconfig Hiermee wordt het scherm zoals in figuur 5.1 geopend. Bij het item 'kernel/library/defaults' kan men nu de basis configuratie van het systeem instellen. Figuur 5.1: Het kernel/library/default menu In deze stap moet gekozen worden tussen uclibc en uc-libc als Libc versie. uclibc is een bibliotheek die tracht gelijkaardig te zijn aan de standaard glibc bibliotheek. Ze heeft gelijkaardige functionaliteit, die het toelaat om de meeste programma's vrij eenvoudig te kunnen overzetten van glibc naar uclibc. Hierdoor is deze bibliotheek iets gewichtiger dan de uc-libc. uc-libc is een bibliotheek die rechtstreeks gericht wordt op het embedded systeem. De functionaliteiten wijken hierdoor wel vrij sterk af van de functionaliteit geleverd door glibc, waardoor porten van applicaties moeilijker is indien uc-libc gebruikt wordt. Aangezien de Dream-software werkt op Linux, ligt de keuze voor uclibc hier voor de hand. De items Customize kernel settings en Customize Vendor/user setting maken dat er na het afsluiten van het huidige configuratievenster, respectievelijk een kernel instellingen venster, en daarna een user instellingen venster geopend worden. Hierin kunnen alle mogelijke instellingen van uclinux gemaakt worden. Na het afsluiten van dit venster worden alle standaardinstellingen van de volgende vensters overlopen. Indien er vragen gesteld worden, dan mag de 41

54 standaard keuze altijd geaccepteerd worden, daar alle instellingen later beschikbaar worden. 2.Kernelinstellingen In dit deel worden de belangrijkste instellingen, benodigd om een werkend systeem te bekomen, overlopen en waar nodig enige uitleg verschaft. De eerste instellingen bevinden zich onder 'processor type and features', hieronder afgebeeld Figuur 5.2: De te maken instellingen voor 'processor type and features'. De optie 'console on UARTLITE' mag enkel geactiveerd worden indien de console effectief op een Xilinx UARTLITE IP core geplaatst werd (Indien een standaard UART16550 IP core gekozen werd kan deze gevonden worden onder 'Character devices'). De GPIO driver voorziet extra device nodes die het mogelijk maken om rechtstreeks GPIO gekoppelde apparaten te kunnen gebruiken. Figuur 5.3: De te maken instellingen voor 'General setup'. 42
.")
55 Bij general setup, afgebeeld in figuur 5.3, zijn er drie belangrijke zaken. Vooraleerst moet 'kernel support for flat binaries' zeker ingeschakeld zijn. 'Zflat support' is niet noodzakelijk, maar betekent dat geen gecomprimeerde flat bestanden kunnen gebruikt worden (zie hoofdstuk 5.3.5). De 'non-power-of-2 kernel allocator' is de alternative kernel allocator, zoals in hoofdstuk besproken. 'Allow allocating large blocks of memory' mag best ingeschakeld worden, zeker aangezien Dream geport werd vanaf standaard Linux. Tenslotte moet networking support ingeschakeld worden indien er enig programma op loopt dat iets met een tcp/ip netwerk zal doen, al is het maar gebruik maken van het loopback device. De Dream-software zelf gebruikt deze niet rechtstreeks, maar om de bediening via netwerk mogelijk te maken werd deze toch geactiveerd. Figuur 5.4: De te maken instellingen voor 'MTD=>RAM/ROM/Flash chip drivers' In het 'memory technology devices' menu staan alle instelling standaard correct. In het submenu RAM/ROM/FLASH chip drivers moet de intel/flash chip ondersteuning echter ingeschakeld worden. Zonder deze instelling zou de kernel wel opstarten, maar is het onmogelijk om gegevens weg te schrijven naar flash. 43

56 Figuur 5.5: De te maken instellingen voor 'MTD=>Mapping drivers for chip access' Bij 'MTD => mapping drivers for chip access' moeten alle 'CFI Flash device...' uitgeschakeld worden met uitzondering van 'CFI Flash device Petalinux Autoconfig'. Indien dit niet gedaan wordt, kan de kernel de flash partities, die later bij de user settings ingesteld worden, niet gebruiken waardoor hij crashed. Het 'generic uclinux RAM/ROM filesystem' support is ook cruciaal. Zonder dit bestandssysteem kan het root filesystem niet gemount worden, wat leidt tot een kernel panic. Bij block devices is het cruciaal dat 'RAM disk support' ingeschakeld wordt. Zonder deze mogelijkheid heeft het besturingssysteem geen enkele schrijfbare map. Het is echter noodzakelijk om een schrijfbare map te gebruiken, zoniet kan vb. de webserver niet opstarten, welke de Dream netwerkbesturing voor zich zou nemen. Bij 'networking options' moet standaard niets gewijzigd worden. Indien echter geavanceerde netwerkfunctie nodig zijn zoals VLAN, multicasting, Ipv6, bridging,..., dan bevinden zich hier een heel aantal nuttige instellingen. 44
' Indien de Xilinx ethernet lite IP core gebruikt werd, zoals in deze applicatie het geval is, dan moet deze zoals")
57 Figuur 5.6: De te maken instellingen voor 'Network Device Support => Ethernet (10 or 100Mbit)' Indien de Xilinx ethernet lite IP core gebruikt werd, zoals in deze applicatie het geval is, dan moet deze zoals hierboven ingeschakeld worden. Indien de Xilinx ethernet IP core gebruikt werd, dan bevindt de driver zich onder 'Ethernet (1000 Mbit)'. Figuur 5.7: De te maken instellingen voor 'Misc devices' De Dream DRM-software zal gebruik maken van de microblaze FSL links, de driver voor deze apparaten gevonden worden onder 'Misc devices' 45

58 Figuur 5.8: De te maken instellingen voor 'File systems' Bij file system moet het 'Compressed ROM' filesystem zeker ingeschakeld worden. Het Journalling Flash File System v2 is een heel handig gecomprimeerd bestandssysteem, geoptimaliseerd om het flash geheugen gelijkmatig te gebruiken. Later kan dit gebruikt worden om instellingen op te slaan. Merk op dat tijdens het inschakelen van jffs2, het item 'library routines => zlib compression support' automatisch ingeschakeld wordt, waardoor dit niet meer zichtbaar is. Aangezien jffs2 een gecomprimeerd bestandssysteem is, heeft het geen nut om XIP gecompileerde bestanden op een dergelijk bestandsformaat te plaatsen. 46

59 3.Gebruikersinstellingen De meeste gebruikers instellingen zijn minder kritisch dan de net gemaakte kernel instellingen. Vandaar dat hier slechts de allerbelangrijkste instellingen zullen overlopen worden. Eenmaal deze instellingen correct gemaakt zijn, is het vrij om te experimenteren. Figuur 5.9: Het uclinux gebruikers instellingen hoofdmenu Figuur 5.10: De te maken instellingen in 'System Settings' In het 'System Settings' menu worden basiseigenschappen van het systeem ingesteld.in het submenu 'Network Addresses' is het mogelijk om het MAC-adres, het standaard IP-adres en het server adres te wijzigen. Deze instellingen zijn 47
60 vooral van toepassing bij u-boot bootloader. Deze stelt het MAC-adres in van de netwerkadapter. Het server ip adress bepaald vanaf welke tftp server de firmware geladen wordt. Het root bestandssysteem wordt best op CRAMFS gelaten. JFFS2 is ook één van de mogelijkheden, maar is momenteel nog niet ondersteund. Het 'Build u-boot' item moet zeker ingeschakeld worden. Zoniet wordt de tweede bootloader, uboot, niet gecompileerd. Hierdoor is het enkel mogelijk om via FS-boot op te starten. U-boot heeft echter, in tegenstelling tot FS-boot, de mogelijkheid om via netwerk (nfs of tftp) de firmware te laden, waardoor deze ten sterkste aangeraden wordt. U-boot geeft ook de boot parameters mee aan de kernel, zoals het netwerkadres. Indien het root bestandssysteem via nfs gebruikt wordt, worden de nfs parameters ook als boot parameters meegegeven aan de kernel. De flash partities kunnen ingesteld worden in het submenu 'Flash partition table'. Standaard zijn er 5 ingestelde partities. De boot en boot-env partities zijn nodig om respectievelijk de u-boot image en de u-boot configuratie in op te slaan. De derde partitie bevat de boot parameters die meegegeven worden aan de kernel tijdens het opstarten. Partitie vier bevat de effectieve systeem image, en is 4MB groot. Tenslotte is er nog een reserve partitie ingesteld die de rest van het flash geheugen omvat. Om de Dream-software later te kunnen debuggen is er een aangepaste versie van gdb aanwezig. Deze is te vinden onder 'Miscellaneous Applications => gdb server'. Meer informatie is te vinden in hoofdstuk Dit zijn de enige echt essentiële instellingen die benodigd zijn. Alle andere programma's kunnen relatief vrij gekozen worden. Het belangrijkste waar op moet gelet worden is dat bepaalde programma's in verschillende versies aanwezig zijn. vb.: mount is beschikbaar onder 'Core applications' en onder 'BusyBox'. Indien deze twee maal geselecteerd wordt, dan zal tijdens de compilatie een fout optreden. De selectie van de juiste versie moet gedaan worden door een vergelijking van de functionaliteiten. Op internet is vrij veel informatie te vinden, het is wel telkenmale zoeken... In de petalinux-dist/user map staan alle broncodes van de programma's die gekozen kunnen worden in het gebruikers menu. Bij vele programma's staat heel wat documentatie. 48
 gecreëerd van de applicatie.")
61 5.4.2.Debuggenophetmicroblazeplatform Om te kunnen debuggen op het microblaze platform, met de gdb debug server geïnstalleerd worden op het microblaze platform zoals hoger beschreven. Bij de Petalinux distributie is er een client gdb, microblaze-uclinux-gdb meegeleverd. Tijdens de compilatie wordt er standaard een debug bestand (applicatie.gdb) gecreëerd van de applicatie. Als eerste stap moet de applicatie via de debug server op het microblaze platform opgestart worden: gdbserver localhost:1234 /bin/applicatie arg1 arg2 Hierin zijn 'arg' de argumenten die meegegeven worden aan de applicatie. Nu is het mogelijk om d.m.v. de gdb-client vanaf pc de debug verbinding te maken met de server. cd $PETALINUX/software/user-apps/applicatie microblaze-uclinux-gdb applicatie.gdb 5.5.Bordinitialisatie Na het afwerken van het hardware- en softwareplatform is het ogenblik aangebroken om het systeem te testen op het SPARTAN-3E bord. Als eerste test kan de hardware getest worden door kermit op te starten (zie appendix A), en daarna de FPGA te configureren. FS-boot zou moeten zichtbaar worden: Figuur 5.11: Het opstarten van FS-boot Om een globaal overzicht te hebben over hetgeen moet gebeuren is het noodzakelijk om de vooropgestelde bootsequentie van iets dichter te bekijken. Hierdoor zullen de benodigde stappen om het systeem te installeren vrij logisch worden. 49
62 FPGA geprogrammeerd Opstarten FS-boot (vanaf 0x ) J U-boot image gevonden? N Laad U-boot (vanaf 0x ) Wacht op u-boot.srec (cat u-boot.srec > /dev/ttys0) Laad U-boot config (vanaf 0x ) Verzend U-boot config (serieel, NFS, TFTP) J linux image gevonden? Laad kernel image in RAM (vanaf 0x ) N Laad kernel image (serial, NFS, TFTP) Start linux kernel Figuur 5.12: De microblaze-uclinux boot sequentie Na het programmeren van de FPGA (ofwel manueel, ofwel via de platform flash) wordt de first stage bootloader, FS-BOOT, automatisch gestart vanuit BRAM. Deze controleert het begin van het flash geheugen indien er zich een u-boot image bevind. Zo ja, dan laadt hij deze in het hoofdgeheugen en voert hem uit. Zo nee, dan wacht FS-boot totdat er via seriële poort een bestand doorgestuurd wordt in srec formaat. Het u-boot.srec ofwel het image.srec bestand kan doorgestuurd worden via het volgende commando: cd /tftpboot cat u-boot.srec > /dev/ttys0 U-boot.srec is de second stage bootloader, gemaakt om rechtstreeks in RAM uitgevoerd te worden. Het u-boot-s.srec bestand is het bestand gemaakt om in flash geplaatst te worden. Image.srec is het volledige besturingssysteem. Het 50
63 wordt echter niet aangeraden om dit door te sturen, aangezien dit meer dan een uur kan duren. Na het voltooien van de transmissie, wordt het doorgestuurde bestand automatisch uitgevoerd. De u-boot bootloader wordt gestart, en controleert als er een configuratie te vinden is in het flashgeheugen. U-boot heeft nu echter nog geen configuratie ingesteld. Deze wordt ingesteld door het uitvoeren van een klein script, ub.config.img. Het doorsturen van een bestand in u-boot is anders dan het doorsturen van een bestand in fs-boot. Bij u-boot moet het bestand via kermit doorgestuurd worden. Eerst moet u-boot een binair bestand verwachten: u-boot> loadb $0x ## Ready for binary (kermit) download to 0x at bps... Hierdoor wordt in u-boot het volgende doorgestuurde bestand via kermit naar het geheugenadres 0x gekopieerd, het begin van het hoofdgeheugen. Nu moet het bestand doorgestuurd worden. Er kan terug gekeerd worden naar de pc door de toetsencombinatie CTRL+\ gevolgd door C in te tikken. Daarna het volgende uitvoeren: C-Kermit>cd /tftpboot C-Kermit>send ub.config.img Na het voltooien van de overdracht kan via 'connect' terug op het bord gewerkt worden. Het script moet nu uitgevoerd worden als volgt: u-boot> autoscr 0x ## Executing script at Petalogix MicroBlaze-Auto Board Configuration Network Configuration: MTD Configuration: Clobber DRAM Configuration: Bootloader Configuration: Kernel Configuration: Boot Configuration: Saving Configurations... Saving Environment to Flash... Un-Protected 1 sectors Erasing Flash.... done Erased 1 sectors Writing to Flash... done Configuration Completed Nu is het flashgeheugen zo ingesteld dat het enkel nog een kwestie is van de juiste images te kopiëren en naar de juiste plaats op het flashgeheugen te plaatsen. Er moet echter wel rekening mee gehouden worden dat het flash 51

64 geheugen 'unprotected' en leeg moet zijn. Flash geheugen kan namelijk enkel per blok gewist worden, waarna de betreffende bits ingesteld moeten worden. Het kopiëren van het bestand naar het platform kan op exact dezelfde manier gebeuren als hierboven. Aangezien het echter grotere bestanden zijn, kan dit vrij lang duren. Vandaar dat de oplossing via nfs hier een stuk sneller is. Het kopiëren van de u-boot flash image via nfs gaat als volgt: nfs 0x :/tftpboot/u-boot-s.bin protect off $(bootstart) +$(bootsize) erase $(bootstart) +$(bootsize) cp.b 0x $(bootstart) $(filesize) Tenslotte moet nog de systeem image gekopieerd worden: nfs 0x :/tftpboot/image.bin protect off $(kernstart) +$(kernsize) erase $(kernstart) +$(kernsize) cp.b 0x $(kernstart) $(filesize) Na het voltooien van deze stap is het bord volledig geïnitialiseerd. Natuurlijk is het nodig om de FPGA zichzelf te laten configureren vanaf platform flash. Dit is heel eenvoudig te verwezenlijken door eerst een prom bestand te maken van het volgende bestand: $PETALINUX/hardware/user-platforms/PLATFORM/implementation/download.bit Dit wordt heel eenvoudig gedaan via een wizard in 'impact', te vinden zoals hieronder afgebeeld: Figuur 5.13: De locatie van de prom creatie wizard Om tenslotte de FPGA automatisch vanaf platformflash te laten opstarten, moeten de drie jumpers op J30 allemaal aanwezig zijn. Met deze laatste stap is de configuratie en initialisatie van een volledig autonoom werkend microblaze-uclinux platform volledig voltooid! Op dit platform kan nu de Dream-software geport worden. 52

65 6.Dream 6.1.OverzichtDream software De Dream-software is ontworpen om via een geluidskaart van een PC het DRM signaal te bekomen en te verwerken volgens de stappen zoals in figuur 6.1 weergegeven. Figuur 6.1: Overzicht van de Dream gegevensstroom. Bron: [10] 53
66 6.2.Dream werkingsprincipes Frequentie entijdssynchronisatie[11] Dream werd ontworpen om te werken op een PC. Via de geluidskaart wordt het binnenkomend signaal gesampled op een frequentie van 48 khz. Bij PC systemen is deze samplefrequentie echter niet 100% correct. Tevens wordt de IF frequentie van de externe demodulator niet 100% vastgelegd. Om deze speling toe te laten is in Dream een samplerate correctie en een frequentie correctie aanwezig. De gevolgen van een verkeerde samplerate en een verkeerde IF zijn gelijkaardig. Beide hebben als invloed dat de ontvangen subkanalen niet meer perfect orthogonaal zijn, waardoor er Inter Carrier Interferentie (ICI) ontstaat. Toch zijn de oorzaken van deze ICI subtiel verschillend. 1.IdealeOFDM demodulatie Indien een DFT genomen wordt van een discreet signaal, dan wordt een discreet spectrum bekomen. Op exact bepaalde frequenties wordt de amplitude en de fase van het signaal bepaald. Bij DRM worden een heel aantal orthogonale kanalen verzonden als één OFDM symbool. Wegens deze orthogonaliteitseis zijn de frequenties van deze kanalen exact bepaald. Indien de IF en de samplerate correct zijn, dan wordt de situatie zoals in figuur 6.2 bekomen. OFDMsubkanalen DFTFrequenties Figuur 6.2: De ideale situatie: DFT frequenties en OFDM-subkanaalfrequenties zijn identiek De bekomen DFT-frequenties en de OFDM-subkanaalfrequenties zijn exact gelijk. Omdat op deze OFDM-frequenties geen ICI optreedt, wordt de OFDM-demodulatie ideaal uitgevoerd. 2.Afwijkingv.d.IF frequentie Indien de IF-frequentie enigszins afwijkt van de ideale situatie, dan komen de DFT en de OFDM-subkanaalfrequenties niet exact meer overeen zoals in figuur
67 Hieruit volgt dat de bekomen DFT-frequenties ICI zullen bevatten. Een bovengrens aan de invloed van deze ICI kan bepaald worden door het berekenen van de SNR. OFDMsubkanalen DFTFrequenties Figuur 6.3: IF niet exact: DFT frequenties en OFDM subkanaal frequentie zijn nergens identiek Speth en Meyr [12] hebben een maximale waarde van de SNR-verzwakking bepaald aan de hand van de relatieve frequentieoffset t.o.v. de carrierspacing. f Tu max Hierin is ƴ de SRV van het ontvangen signaal, en Δƴmax de maximale SRV verzwakking als gevolg van ICI. Aan de hand van deze formule wordt onderstaande figuur bekomen. Figuur 6.4: SRV Degradatie door ICI bij frequentieoffset. bron: [11] 3.Afwijkingv./d.bemonsteringsfrequentie Samplerate fouten hebben een iets andere invloed dan frequentieoffset fouten, zoals in onderstaande figuur wordt weergegeven. Indien de samplerate afregeling ervoor zorgt dat de eerste sample op exact het juiste moment genomen wordt, dan zal de frequentie van dit subkanaal exact overeenkomen met de resulterende 55
68 DFT-frequentie. Bij verdere samples zal dit tijdstip echter enigszins verlopen t.o.v. het ideale tijdstip, waardoor de resulterende DFT frequentie niet exact gelijk meer zal zijn aan de subkanaal frequentie. Hierdoor ontstaat er dus een ICI waarvan de grootte wijzigt van subkanaal tot subkanaal. OFDMsubkanalen DFTFrequenties Figuur 6.5: Samplerate niet exact: DFT frequenties verschuiven t.o.v. de OFDM subkanaal frequenties 4.BenodigdeIF enbemonsteringsfrequentieaccuraatheid Volgens de DRM-standaard ([1], annex A+B) ligt de benodigde SRV voor een BER van 10-4 onder de slechtste omstandigheden op 20,4 db. Bij de werkelijke implementatie in Dream is volgens [13] in het slechtste geval echter een SNR van 26 db benodigd. In [11] werd een signaal SRV van 25 db, en een verlies van 0,5 db vooropgesteld, waardoor er een relatieve frequentie offset van 1% (=4,8 Hz) toegelaten was. Aangezien praktisch echter 26 db SRV nodig is, moet er vanuit gegaan worden dat het ontvangen signaal een SRV bezit die hoger is dan 26 db. Volgens figuur 6.4 wordt een SRV-daling van minder dan anderhalf db bekomen voor een signaal SRV van minder dan 30 db indien de relatieve frequentieafwijking minder dan 1% bedraagt. Indien nu opnieuw slechts dezelfde 0,5 db verzwakking vooropgesteld wordt, dan moet de frequentieoffset dalen tot slechts 0,5% (= 2,4Hz) Om de maximale samplerateafwijking te bekomen, kan het hierboven bekomen resultaat heel eenvoudig gebruikt worden. De maximale relatieve frequentieafwijking mag 1% (0,5% indien een ideale ontvanger vooropgesteld wordt) bedragen. Deze frequentieafwijking mag niet bereikt worden over het maximum aantal kanalen. De afregeling van deze kanalen wordt echter uitgevoerd door de frequentiereferenties, waardoor deze ongeveer in het midden van het symbool afgeregeld worden. M.a.w. het maximum aantal kanalen tussen de correct afgeregelde frequentie en de meest afwijkende frequentie bedraagt slechts de helft van het maximaal aantal kanalen. Hieruit volgt dat om een SRV van meer dan 25dB te bekomen een maximale afwijking van 1% gedeeld door 56
69 200 kanalen, of 0,005% toegelaten is. 5.Werkingsprincipevandeafregelkring In figuur 6.6 wordt de frequentie- en samplerate afregeling die gebruikt wordt in de DRM software nader bekeken. Figuur 6.6: Blokschema van de frequentie en samplerate afregeling. Bron: [11] De afregeling van de samplerate en de frequentie wordt aangestuurd door de Frequentie tracker. Deze wordt geplaatst na de OFDM-demodulatie. Hierdoor wordt een frequentie- naar tijdsdomein terugkoppeling voorzien. Vooreerst zal de frequentie tracker de frequentie correctie afregelen aan de hand van de huidige gemeten frequentie en de bekomen offset na de OFDM-demodulatie. Eenmaal deze afregeling voltooid is, kan de sampleratecorrectie voltooid worden aan de hand van het afwijken van de piloot- of referentiecellen t.o.v. de ideale posities. 6.Invloedopdeembeddedimplementatie In het embedded systeem wordt de samplerate afgeleid van een 80Mhz klok die een accuraatheid groter dan 0,5*10-4 heeft waardoor een samplerateaanpassing dus niet nodig zal zijn. Dit is een relatief rekenintensief deel dat volledig kan verwijderd worden uit de Dream-software (Dit werd trouwens ook gedaan in het ontwerp gemaakt in [2]). De frequentiecorrectie is echter niet zo voordelig om te verwijderen. De frequentiecorrectie wordt voltooid aan de hand van de mixer. Deze is toch steeds nodig om te kunnen mixen vanaf de IF van 12kHz naar basisband. Het maken van een tuner die tot op 2,4Hz nauwkeurig kan afstemmen is zeker geen eenvoudig opgave. Dit gebeurt digitaal, waardoor de DDS-precisie heel groot moet worden. Tevens is de frequentietracking hoe dan ook nodig indien een terugkoppeling naar de RF demodulator (= DDS) voorzien wordt. 57
70 6.2.2.Frequentieacquisitie Zoals in figuur 6.1 weergegeven wordt, wordt de frequentieacquisitie voltooid als eerste stap na het uitvoeren van de sampleratecorrectie. De reden hiervoor is dat het uitvoeren van de frequentieacquisitie heel eenvoudig kan voltooid worden aan de hand van de frequentiereferentiecellen. Deze cellen worden namelijk met een vermogenversterking van twee (=10dB) uitgezonden. Omdat de andere cellen tevens een volledig willekeurige fase en amplitude bezitten, zal het gemiddelde vermogenverschil tussen de frequentiecellen en de standaard cellen groter worden dan de vermogenversterking van 10 db. Indien een FFT met een lengte groter dan één symbool genomen wordt, dan worden alle cellen in deze symbolen uitgemiddeld. Hieruit volgt dat het spectrum van niet-referentiecellen vrijwel vlak zal worden, terwijl het spectrum van de frequentiereferentiecellen hier heel sterk bovenuit zal steken, zoals in onderstaande figuur weergegeven wordt. Figuur 6.7: Het spectrum bij het uitvoeren van een FFT over meerdere symbolen. De frequentiereferenties van resp. 750, 2250 en 3000Hz zijn heel goed zichtbaar. Bron: [14] Om de frequentieacquisitie exacter te maken, kan men de FFT nemen over een langere periode. Deze kan echter niet oneindig lang gemaakt worden, daar de gevolgen van de kanaalfading de resultaten zouden beïnvloeden. 58
71 6.2.3.Tijdsacquisitie De tijdsacquisitie is relatief simpel qua implementatie, maar zit echter subtiel in elkaar. Bij een OFDM-modulatie bestaat ieder symbool (met lengte Ts) uit een guard interval (TG) en een usable interval (TU). De subkanaalafstand bij een OFDM-symbool is gelijk aan 1, waaruit volgt dat iedere sinus in een subkanaal Tu een geheel aantal keer in de bruikbare symbooltijd past, zoals in onderstaande figuur weergegeven. Afbeelding 6.8: Iedere sinus van een subkanaal past een geheel aantal keer in de bruikbare symboollengte. Bron: [15] Het guard interval wordt voor het symbool geplaatst, of m.a.w. dit is een prefix. Het specifieke aan deze prefix is dat dit een cyclische uitbreiding is van het OFDM-symbool. Dit houdt in dat ieder subkanaal een prefix krijgt zoals in figuur 6.9 weergegeven. Hieruit volgt dat de prefix identiek is aan het laatste deel van het symbool. M.a.w., indien een autocorrelatie over een interval met lengte T g en met een tijdsverschuiving Tu genomen wordt, dan zal deze maximaal zijn indien dit interval overeenkomt met de prefix. Op deze manier wordt het vrij eenvoudig om het exacte begin van een symbool te bepalen. Tevens kan men nu aan de hand van dit principe heel eenvoudig de robuustheidsmodus bepalen. De bruikbare symboollengte is namelijk verschillend voor de verschillende modi, waardoor een simpele wijziging van de tijdsverschuiving van de autocorrelatie slechts een maximum zal geven bij de correcte robuustheidsmodus. 59
72 Tu Prefix Bruikbaar symbool Figuur 6.9: Eén subkanaal van één symbool nader bekeken. Om de detectie echter betrouwbaarder te maken bij het ontvangen van stoorsignalen, wordt de energie van het gekozen interval nog in rekening gebracht als volgt ([14], p. 14): i Ng 1 i = [ r n r n N r n2 r n N2 ] n=i Hierin is: N = aantal samples in Tu Ng = aantal samples in Tg Bij het praktisch uitvoeren worden de onderstaande correlaties bekomen. Afbeelding 6.10: links: Enkel correlatie, rechts: Met guard energie aanpassing 60
73 6.2.4.Kanaalschatting[14] De kanaalschatting in DRM wordt mogelijk gemaakt door de pilootsymbolen. Deze pilootsymbolen wijzigen telkenmale van kanaal bij ieder ontvangen symbool, zoals in onderstaande figuur weergegeven. OFDM kanaal index Tijd Figuur 6.11: Lokatie van de pilootsymbolen. Bron:[14] De optimale kanaalschatting kan voltooid worden door middel van een tweedimensionaal wienerfilter, zoals in onderstaande figuur weergegeven. Een tweedimensionaal wienerfilter is echter te complex volgens OFDM kanaal index Tijd Figuur 6.12: De optimale implementatie aan de hand van een 2D-wienerfilter. Bron:[14] 61
![Kurpiers en Fischer [14]. Een ietwat minder accurate schatting van de kanalen kan bekomen worden door twee ééndimensionale wienerfilters, zoals in figuur 6.13, toe te passen na elkaar.](/docs-images/24/2357534/images/74-0.png "Hierdoor daalt de complexiteit heel sterk, terwijl slechts een kleine schattingsfout geïntroduceerd wordt. OFDM kanaal index Tijd Figuur 6.")
74 Kurpiers en Fischer [14]. Een ietwat minder accurate schatting van de kanalen kan bekomen worden door twee ééndimensionale wienerfilters, zoals in figuur 6.13, toe te passen na elkaar. Hierdoor daalt de complexiteit heel sterk, terwijl slechts een kleine schattingsfout geïntroduceerd wordt. OFDM kanaal index Tijd Figuur 6.13: De niet optimale implementatie aan de hand van twee 1D-wienerfilters. Bron:[14] Voor de kanaalschatting wordt als kanaalmodel een typisch kortegolfkanaalmodel met doppler effect gebruikt, als volgt beschreven: 2 H f = d e f 2 2 d Waarin 2 het ruisvermogen is. d Bij deze implementatie wordt bekomen dat de schattingsfout bij een kanaal type 3([1], annex B), 20dB SNR, 10kHz bandbreedte en robuustheidsmodus B, niet hoger dan -24dB is t.o.v. de 2D optimale kanaalschatting([14], p.11). 6.3.Benodigdebibliotheken De Dream-software gebruikt een aantal bibliotheken, zoals in onderstaande figuur weergegeven. 62
75 Dream DRM-Software FFTW FAAD2 Journaline QWT Hamlib Figuur 6.14: Overzicht van de benodigde bibliotheken. (rood = noodzakelijk, oranje = gewenst, groen = optioneel) De FFTW-bibliotheek is absoluut noodzakelijk. Zonder deze bibliotheek is het onmogelijk om Dream te laten werken aangezien deze nodig is om de OFDM-demodulatie te kunnen voltooien. Om een volledig zelfstandige DRM-ontvanger te kunnen maken, zijn ook de FAAD2 en de Journaline bibliotheek nodig. Zonder deze bibliotheken kan de audio- respectievelijk datastream niet gedecodeerd worden. De DRM- gegevensstream kan echter nog steeds gedecodeerd worden. De QWT-bibliotheek zorgt voor een grafische gebruikersinterface. De Hamlibbibliotheek zorgt er voor dat standaard LF-MF-HF-ontvangers kunnen bestuurd worden. Het ontwerpen van een back-end voor de aansturing van de RFdemodulatie is een mogelijkheid. 6.4.Portenvandesoftware Het porten van software naar het microblaze-uclinux gebeurt in twee stappen. De eerste stap is het aanpassen van de Makefile zodoende dat de software gecompileerd wordt voor dit platform. Er zijn twee belangrijke soorten van aanpassingen die gemaakt moeten worden aan de Makefile. Indien het programma gebruik maakt van het configure-systeem, dan kan er heel eenvoudig een Makefile gemaakt worden die dit configure-systeem gebruikt om de aanpassing die benodigd zijn te volbrengen. Indien het configure-systeem echter niet gebruikt werd om de Makefile te genereren, dan is het nodig om manueel ofwel een nieuwe Makefile te schrijven, ofwel de bestaande Makefile te 63
76 doorgronden en aan te passen. Een voorbeeld van het ontwerp van de Makefiles met of zonder gebruik van het configure-systeem is te vinden in appendix D. De tweede stap is het aanpassen van de software volgens de wijzigingen uitgelegd in hoofdstuk 5.3. De eerste bibliotheek die geport werd is de journaline bibliotheek. Deze bibliotheek bestaat zowel uit C code in de bibliotheek zelf als een deel C++ code in het testprogramma. Hierdoor werd het duidelijk hoe een dergelijke bibliotheek geport moet worden. De volgende output wordt bekomen bij het uitvoeren van het testprogramma: # journalinedemo nml* f 6e 6c 69 6e e e e 67 6c e DW O nline... Deutsche Nachric hten...e nglish n ews De tweede bibliotheek die geport werd, is de fftw bibliotheek. Deze is heel belangrijk daar de Dream-software intensief gebruik maakt van deze bibliotheek. De FFTW-bibliotheek werd getest aan de hand van het fftw_test programma met de volgende resultaten: Hardware instellingen: 75Mhz processor, 100Mhz RAM, zonder FPU # fftw_test -s 32 Please wait (exorcising evil spirits). SPEED TEST: n = 32, FFTW_FORWARD, out of place, generic time for one fft: ms ( us/point) "mflops" = 5 (n log2 n) / (t in microseconds) = De belangrijkste conclusie die hieruit gemaakt kan worden, is dat de processor maar in staat is om 0,22 Mflops te halen zonder FPU. De configuratie van de U-BOOT bootloader, een deel van de extra functionaliteit die bij Petalinux hoort, laat echter het gebruik van een FPU nog niet toe. De maximale theoretische FPU berekensnelheid op een 75Mhz processor bedraagt namelijk 18,75MFlops, waardoor het zeker mogelijk is om de benodigde rekensnelheden voor de DRMdemodulatie4 te behalen. 4 Zie tabel 3.1 op pag
77 6.5.Toekomstmogelijkheden Het aantal mogelijkheden beschikbaar op dit platform is extreem groot. Het kan een volledige DRM-ontvanger, die aan het netwerk gekoppeld is, creëren met een minimum aan IC's. Een flash geheugen, een RAM geheugen, een ethernet PHY, en een FPGA zijn de enige onderdelen die nodig zijn om een netwerkgekoppelde DRM-ontvanger te doen werken. De digitale verwerking die gebeurt in DRM Thesis 2 kan eenvoudig samen in één FPGA geplaatst worden. Een tweede grote mogelijkheid is het rechtstreeks implementeren in de FPGA van de aansturing van een klasse-s eindtrap. Vooral de implementatie van een hogere orde Sigma-Delta modulator[7], zou een heel kwalitatieve klasse-d versterker kunnen leveren. 65
78 7.Conclusie De hardwarearchitectuur bepaald voor een groot deel de mogelijkheden van het uiteindelijke product. Om een gefundeerde beslissing te kunnen maken omtrent deze architectuur is vooreerst een vrij grondige studie van de DRM-standaard voltooid. Hierdoor werd het vrij snel duidelijk dat een DRM-ontvanger creëeren geen eenvoudige opgave is, waardoor besloten werd om bestaande software, namelijk Dream, te gebruiken als implementatie van tenminste een deel van de ontvanger. Na het maken van deze beslissing werd Dream naderbij bekeken, vooral op gebied van complexiteit en benodigde verwerkingssnelheid, waaruit bleek dat het onmogelijk is om een volledige DRM-ontvanger zelf te creëeren gedurende de looptijd van deze scriptie. In het beste geval was het mogelijk om slechts een klein deel ervan te implementeren. Eenmaal tot deze conclusie gekomen, was het ogenblik aangebroken om een hardwarearchitectuur te definiëren. De hardwarearchitectuur had enkele mogelijke vormen, maar wegens de complexiteitsstudie en het feit dat de voorgaande scriptie al in FPGA uitgevoerd werd, kwam de beslissing vrij snel om de hardware/software co-design route te volgen. Deze had de beste verwachtingen en was het meest flexibel, maar was niet de eenvoudigste. De keuze voor het al of niet gebruiken van een besturingssysteem op deze hardware is gesteld. Hierbij is gebleken dat het besturingssysteem voordeliger was. De keuze van het besturingssysteem viel op uclinux. De belangrijkste redenen hiervoor waren dat de gebruikersinterface hierdoor heel eenvoudig te implementeren is, evenals het streamen van de audio en data naar het netwerk, terwijl de extra overhead van het besturingssysteem beperkt blijft. Het draaiende krijgen van het besturingssysteem op het platform ging oorspronkelijk vrij snel. Al na enkele weken was er een uclinux draaiende op het platform. Na het ontdekken dat de door Xilinx meegeleverde C++ compiler voor microblaze niet de volledige C++ standaard ondersteunde, was het noodzakelijk geworden om een alternatief te zoeken. Dit alternatief werd gevonden in de Petalinux uclinux distributie. Hierin is een verbeterde versie van de C++ compiler aanwezig. Tevens bezit de Petalinux distributie over een dual-stage bootloader, die noodzakelijk is om een dergelijk platform op te starten. 66
79 Jammergenoeg bevatte deze distributie heel wat kinderfoutjes, waardoor de initialisatie van het platform heel wat langer duurde dan voorzien. Door deze vertraging was het al halverwege april vooraleer een volledig correct draaiend platform verkregen werd, waarna er slechts een heel beperkte tijd overbleef om de effectieve DRM-software werkende te krijgen op het platform. Helaas werd deze doelstelling niet gehaald. In het begin van deze scriptie werden een aantal eisen aan het ontwerp van de DRM-ontvanger opgelegd. Deze eisen leidden oorspronkelijk tot een gescheiden hardware/software ontwerp. Gedurende de maand november koos mijn toenmalige thesispartner echter het hazenpad, waarna ik er alleen voorstond. Hierdoor werd het roer volledig omgegooid, aangezien de oorspronkelijk gekozen route onmogelijk was om alleen te voltooien. De gekozen route bleek echter ook niet zo eenvoudig, maar opende wel een heel aantal nieuwe mogelijkheden naar toekomstige applicaties toe. Het implementeren van een werkende DRM-ontvanger is zeker haalbaar op het gekozen platform. De gekozen architectuur laat het toe om een goed evenwicht te zoeken tussen benodigde hard- en software, waardoor de mogelijkheden van een dergelijk platform, zelfs buiten het gebied van een DRM-ontvanger, enorm zijn. 67
80 AppendixA:InstallatievandeXilinxtoolsenPetalinux In de loop van deze scriptie werd het duidelijk dat de installatie van de Xilinx ISE en EDK in een algemene (lees recente) Linux versie niet altijd van een leien dakje verloopt. Vooral de installatie van de download cable drivers bleek een bijna onoverkomelijk probleem. Er bestaat sindskort echter een volledige open source oplossing die op iedere recente Linux kernel met udev ondersteuning (bij zo goed als alle distibuties standaard geworden) werkt. A.1.ControlevandeLinuxomgeving Op ubuntu Linux en afgeleiden (kubuntu, xubuntu, edubuntu) verwijst de /bin/sh symbolische link meestal naar /bin/dash. Hierdoor ontstaan er een heel aantal fouten tijdens de installatie, aangezien het merendeel van de scripts /bin/sh i.p.v. /bin/bash als interpreter gebruiken. De /bin/sh link moet dus best gewijzigd worden: sudo rm /bin/sh; sudo ln -s /bin/bash /bin/sh Ter uitvoering van 'make menuconfig' is de libncurses versie 4 bibliotheek benodigd. A.2.InstallatievandeXilinxtools Xilinx ISE en EDK zijn vrij eenvoudig te installeren. Een goed locatie om ISE respectievelijk EDK te installeren is: /opt/xilinx/versie/ise /opt/xilinx/versie/edk Hierin word VERSIE uiteraard vervangen door de te installeren versie. Indien nu een nieuwe versie geïnstalleerd moet worden, kunnen deze heel eenvoudig langs elkaar geïnstalleerd worden. Door middel van het maken van een extra symbolische link is het nu ook mogelijk om heel eenvoudig te kunnen overschakelen van de ene versie naar de andere zonder dat er iets moet wijzigen aan de rest van de omgeving: cd /opt/xilinx ln -s /opt/xilinx/versie tools Om het gebruikersgemak te verbeteren, kunnen best een aantal omgevingsvariabelen automatisch ingesteld worden. Wegens het maken van 68
81 bovenstaande symbolische link kan de locatie van de Xilinx tools nu constant blijven, ongeacht de te gebruiken versie. Door het wijzigen van de symbolische link kan nu namelijk de te gebruiken versie gekozen worden. Het automatisch instellen van de Xilinx omgeving kan heel eenvoudig gedaan worden door het toevoegen van de volgende code aan het einde van ~/.bashrc #Xilinx ISE environment settings if [ -e "/opt/xilinx/tools/ise/settings.sh" ]; then source /opt/xilinx/tools/ise/settings.sh echo "Xilinx ISE environment set to '/opt/xilinx/tools/ise'" fi #Xilinx EDK environment settings if [ -e "/opt/xilinx/tools/edk/settings.sh" ]; then source /opt/xilinx/tools/edk/settings.sh echo "Xilinx EDK environment set to '/opt/xilinx/tools/edk'" fi Door het uitvoeren van 'xps' of 'ise' in een console zullen deze nu correct uitgevoerd worden. Indien adobe acrobat reader niet geinstalleerd is op het systeem, dan kan een alternatieve pdf reader ook gebruikt worden. Het enigste dat hiervoor gedaan moet worden is een symbolische link maken met naam acroread naar de te gebruiken pdf weergave programma. vb.: cd /usr/bin sudo ln -s kpdf acroread A.3.Installatievandedownloadcable(USBofparallelvIIIopparallelvIVin viiicompatibiliteit) De standaard driver die bij ISE en EDK aanwezig is, maakt gebruik van de jungo Windrvr binaire kernel module. Aangezien het een binaire kernel module is, kan deze nogal vaak bij het ontstaan van een nieuwe kernel onbruikbaar worden. Xilinx slaagt er niet in om tijdig nieuwe versies uit te brengen, waardoor enkel oude kernels (lees: 2.4 en 2.6<2.6.18) momenteel ondersteund zijn. Vandaar dat Michael Gernoth een alternatief ontwikkelde om zonder deze proprietary kernel module de impact software te kunnen laten werken. De installatie is echter niet zo eenvoudig, en wordt hier wat toegelicht. 1. Download de broncode vanaf onderstaande website 2. pak het bestand uit (best onder /opt/xilinx) 69
82 3. controleer als libusb en fxload geïnstalleerd is (vb. in ubuntu): sudo apt-get install libusb-dev fxload 4. voer 'make' uit in de usb-driver map 5. kopieer libusb-driver.so naar /usr/local/lib 6. Voeg de volgende lijnen toe aan ~/.bashrc #Xilinx download cable settings if [ -e "/usr/local/lib/libusb-driver.so" ]; then export LD_PRELOAD=/usr/local/lib/libusb-driver.so echo "Xilinx download cable module preloaded from '/usr/local/lib/usb-driver.so'" fi sluit nu de huidige console af, en open een nieuwe. 7. maak een nieuw bestand: /etc/udev/rules.d/50-xilinx-usb-cable.rules en plaats de volgende lijn in dit bestand: ACTION=="add", BUS=="usb", SYSFS{idVendor}=="03fd", MODE="666" 8. restart udev met het volgende commando: sudo /etc/init.d/udev restart 9. sluit het bordje aan en schakel het in 10.controleer het usb bus en nummer met: lsusb grep Xilinx 11.Als de usb id niet gelijk is aan 03fd:0008 download de nieuwste firmware van: ftp://ftp.xilinx.com/pub/utilities/fpga/xusbdfwu-1025.zip kopieer hem naar /opt/xilinx en pak het bestand uit. cp xusbdfwu.hex /opt/xilinx/tools/ise/bin/lin sudo /sbin/fxload -v -t fx2 -I /opt/xilinx/tools/ise/bin/lin/xusbdfwu.hex -D /proc/bus/usb/002/004 waarbij 002 en 004 vervangen moeten worden door de bus ID's die lsusb teruggaf. 12.Start impact, normaal moet alles werken. Impact zal waarschijnlijk wel vragen om een firmware update uit te voeren. Daarna kan het systeem gewoon gebruikt worden. 13.Indien impact nog steeds geen connectie kan maken: cd /opt/xilinx/tools/ise/bin/lin sudo su (Als root inloggen) source./setup_pcusb A.4.InstallatievanPetalinux 70
83 De installatie van Petalinux is op zich heel eenvoudig. Het enigste wat moet gedaan worden is Petalinux downloaden vanaf de website: en deze uit te pakken in de home map van de gebruiker. Dit kan best gebeuren door het Petalinux-***.tar.gz bestand naar ~ te verplaatsen en dan via tar xvzf Petalinux-***.tar.gz uit te voeren. Het bestand bevat namelijk een héél groot aantal bestanden, waardoor een grafisch uitpak programma er soms héél lang kan over doen om de inhoud weer te geven. Maak nu nog een symbolische link: vanaf ~/Petalinux naar de Petalinux installatie map. Er is bij de rc1 versie echter een probleem, waardoor het noodzakelijk is om een symbolische link te maken van /home/devel naar de home map van de gebruiker. Hetzelfde is nodig voor /home/jwilliam. Indien er nog geen nieuwere versie dan rc1 verkrijgbaar is, dan zal er best gewerkt worden met de bijgeleverde versie op CD. In deze versie zijn namelijk al een heel aantal kleine foutjes gehaald, die het gebruik ervan heel wat minder zenuwslopend maken. Tenslotte wordt het volgende best nog toegevoegd op het einde van ~/.bashrc #Petalinux environment settings if [ -e "/home/`whoami`/petalinux/settings.sh" ]; then OLDPWD=`pwd` cd /home/`whoami`/petalinux source./settings.sh cd $OLDPWD fi A.5.Kermit Kermit is een krachtig serieel communicatie programma. Na het installeren ervan (via sudo apt-get install kermit) is het echter aangeraden om een ~/.kermrc bestand aan te maken met de volgende inhoud: set line /dev/ttys0 set speed set carrier-watch off set handshake none set flow-control none robust set file type bin set file name lit set rec pack 1000 set send pack 1000 set key \127 \8 71
84 set key \8 \127 set window 5 Let er echter op de ttys0 de eerste seriële poort voorstelt. ttys1 is de tweede,... Nadat dit bestand gecreëerd werd, kan kermit gebruikt worden als volgt: kermit -c Om tijdens het uitvoeren van kermit terug naar de host pc terug te keren, om vb. een bestand door te sturen, moet CTRL+\ ingedrukt worden. Op azerty toetsenborden kan dit een probleem opleveren aangezien nu CTRL+ALT.GR+< ingedrukt moet worden, en dit op veel toestenborden niet werkt met de linker CTRL toets. Bij het gebruiken van de rechter CTRL werkt dit echter wel. A.6.InstallatievanuClinuxBSPbestandenvoorWindows Zonder de uclinux BSP bestanden is het onmogelijk om een auto-config.in bestand te maken. Dit bestand is echter nodig om alle instellingen kenbaar te maken aan de uclinux kernel. Deze BSP bestanden waren te vinden op de maar zijn daar nu verdwenen. Er zit echter altijd een versie van deze bestanden in de Petalogix distributie. De BSP bestanden staan in: $Petalogix/hardware/EDK_user_repository Door het kopiëren van deze map naar de map boven de EDK installatiemap op de windows pc is het mogelijk om de hardware instellingen en compilatie ook op een windows pc te voltooien. 72

85 AppendixB:Opzettenvandebasishardware Figuur B.1 (links): Keuze van het ontwikkelbord - Spartan-3E rev. D. Figuur B.2 (rechts): Keuze van de processor enkel microblaze processor is beschikbaar op een SPARTAN-3E FPGA 73
: Ingestelde parameters: RS232_DTE, uartlite, baudrate 115200, use interrupt. De keuze tussen DTE en DCE hangt af van de beschikbare kabel. Figuur B.")
86 Figuur B.3 (links): Ingestelde parameters: 50Mhz reference clock, 75Mhz processor clock, Hardware debug module, 8kB BRAM, no cache, no FPU Figuur B.4 (rechts): Ingestelde parameters: RS232_DTE, uartlite, baudrate , use interrupt. De keuze tussen DTE en DCE hangt af van de beschikbare kabel. Figuur B.5 (links): Ingestelde parameters: flash zeker inschakelen. LED's, DIP switches en Buttons naar believen. Figuur B.6 (rechts): Ingestelde parameters: DDR_SDRAM inschakelen, Ethernet_MAC wijzigen naar OPB_ethernetlite met interrupt 74

87 Figuur B.7 (links): Toevoegen van extra randapparaten: Timer toevoegen met de volgende instellingen: bit width: 32, one timer present, use interrrupt Figuur B.8 (rechts): STDIN en STDOUT instellen. Deze instellingen zijn enkel geldig voor de testprogramma's die automatisch zullen geïmporteerd worden in het project, en niet voor de uclinux kernel. (instelling vor uclinux: zie hoofdstuk ) Figuur B.9 + B.10: Geheugenlocaties van de verschillende testprogramma's. Indien er voor gekozen wordt om de randapparatuur testen in het DDR geheugen te plaatsen, dan moet men deze manueel inladen in het geheugen. 75
88 Na het klikken van generate wordt het volledige systeem gegenereerd. De laatste stap geeft een overzicht weer van het te creëren systeem. Figuur B.11: Overzicht van het bekomen systeem Merk op dat het DDR geheugenbereik slechts van 0x tot 0x25ffffff loopt, wat slechts 32MB groot is (i.p.v. de werkelijke 64MB). Dit is een fout die in de BSB-borddefinitie aanwezig is. Deze kan echter heel eenvoudig na het genereren van het systeem aangepast worden via dubbelklikken op DDR_SDRAM_32Mx16 daarna het tabblad system, dan Address => High Address of Bank 0 instellen op 0x27ffffff. 76

89 Figuur B.12: 64MB ram instellen na de BSB wizard 77
EDK Walkthrough: Hardwareontwerp met GPIO en UART Deel 1
 EDK Walkthrough: Hardwareontwerp met GPIO en UART Deel 1 1. Doel Kennismaking met de EDK van Xilinx: - begrijpen van de ontwerpomgeving en design flow - aanmaken van een Xilinx Platform Studio project
EDK Walkthrough: Hardwareontwerp met GPIO en UART Deel 1 1. Doel Kennismaking met de EDK van Xilinx: - begrijpen van de ontwerpomgeving en design flow - aanmaken van een Xilinx Platform Studio project
Hardware-software Co-design
 Jan Genoe KHLim Versie: maandag 10 juli 2000 Pagina 1 Wat is HW/SW Co-design Traditioneel design: De verdeling tussen de HW en de SW gebeurt bij het begin en beiden worden onafhankelijk ontwikkeld Verweven
Jan Genoe KHLim Versie: maandag 10 juli 2000 Pagina 1 Wat is HW/SW Co-design Traditioneel design: De verdeling tussen de HW en de SW gebeurt bij het begin en beiden worden onafhankelijk ontwikkeld Verweven
Herconfigureerbare Hardware in Ieders Bereik
 Herconfigureerbare Hardware in Ieders Bereik Prof. Dirk Stroobandt Universiteit Gent Vakgroep ELIS Onderzoeksgroep PARIS http://www.elis.ugent.be/~dstr/ Overzicht Nood aan digitale verwerking van gegevens
Herconfigureerbare Hardware in Ieders Bereik Prof. Dirk Stroobandt Universiteit Gent Vakgroep ELIS Onderzoeksgroep PARIS http://www.elis.ugent.be/~dstr/ Overzicht Nood aan digitale verwerking van gegevens
Pajottenlandse Radio Amateurs
 Pajottenlandse Radio Amateurs ON3BL 07/02/2014 SDR ontvangst met RTL-stick Waarvoor staat de afkorting SDR? SDR Software Defined Radio Definitie van Software Defined Radio Een radiocommunicatiesysteem
Pajottenlandse Radio Amateurs ON3BL 07/02/2014 SDR ontvangst met RTL-stick Waarvoor staat de afkorting SDR? SDR Software Defined Radio Definitie van Software Defined Radio Een radiocommunicatiesysteem
Een intelligent DMX netwerk
 WORKSHOP STEPP Een intelligent DMX netwerk WORKSHOP STEPP Wat is DMX? Een intelligent DMX netwerk Demo opstelling Probleem oplossing Wat is DMX? Hoe is het DMX signaal ontstaan DMX in de praktijk Hoe
WORKSHOP STEPP Een intelligent DMX netwerk WORKSHOP STEPP Wat is DMX? Een intelligent DMX netwerk Demo opstelling Probleem oplossing Wat is DMX? Hoe is het DMX signaal ontstaan DMX in de praktijk Hoe
C-Tech TSFP 2010T PROFESSIONELE TERRESTRISCHE SIGNAALMETER
 C-Tech TSFP 2010T PROFESSIONELE TERRESTRISCHE SIGNAALMETER Gebruiksaanwijzing Content Productomschrijving 1.Handleiding 1 1.1 Voorzijde en toetsen 1 1.2 Power On/Off 3 1.3 Netvoeding & Batterij 3 2. Menu
C-Tech TSFP 2010T PROFESSIONELE TERRESTRISCHE SIGNAALMETER Gebruiksaanwijzing Content Productomschrijving 1.Handleiding 1 1.1 Voorzijde en toetsen 1 1.2 Power On/Off 3 1.3 Netvoeding & Batterij 3 2. Menu
Technische Normen en Richtlijnen voor de Set Top Box Bedoeld voor DVB-T ontvangst
 Technische Normen en Richtlijnen voor de Set Top Box Bedoeld voor DVB-T ontvangst Focuspunt: Digitale televisie signaalontvangst Procesgebied: Willemstad, Curaçao Versie 1c: September 2011 INHOUDSOPGAVE
Technische Normen en Richtlijnen voor de Set Top Box Bedoeld voor DVB-T ontvangst Focuspunt: Digitale televisie signaalontvangst Procesgebied: Willemstad, Curaçao Versie 1c: September 2011 INHOUDSOPGAVE
Elektor Live Software Defined Radio. Pascal Schiks & Martin Dudok van Heel
 Elektor Live Software Defined Radio Pascal Schiks & Martin Dudok van Heel Software Defined Radio Wat is dat? Een radio zend- of ontvanginstallatie waarin: Elektronica is vervangen door software Het radiosignaal
Elektor Live Software Defined Radio Pascal Schiks & Martin Dudok van Heel Software Defined Radio Wat is dat? Een radio zend- of ontvanginstallatie waarin: Elektronica is vervangen door software Het radiosignaal
Wat is Arduino? Arduino = microprocessor (Atmel)
") Intro tot Arduino Wat is Arduino? Volgens de website: Arduino is an open-source electronics prototyping platform based on flexible, easy-to-use hardware and software. It's intended for artists, designers,
Intro tot Arduino Wat is Arduino? Volgens de website: Arduino is an open-source electronics prototyping platform based on flexible, easy-to-use hardware and software. It's intended for artists, designers,
De seriële poort Jan Genoe KHLIM
 De seriële poort Jan Genoe KHLIM De seriële poort 1 De seriële poort Een PC bezit een aantal seriële poorten: COM1, COM2,... Er zijn 1 of 2 seriële poorten voorzien op het moederbord Plug-in kaarten laten
De seriële poort Jan Genoe KHLIM De seriële poort 1 De seriële poort Een PC bezit een aantal seriële poorten: COM1, COM2,... Er zijn 1 of 2 seriële poorten voorzien op het moederbord Plug-in kaarten laten
Samenvatting Field programmabale gate arrays (FPGA s) Dynamische herconfiguratie.
 Dynamische herconfiguratie.") Samenvatting Field programmabale gate arrays (FPGA s) zijn heel aantrekkelijk als ontwerpplatform voor digitale systemen. FPGA s zijn geïntegreerde schakelingen die geprogrammeerd of geconfigureerd kunnen
Samenvatting Field programmabale gate arrays (FPGA s) zijn heel aantrekkelijk als ontwerpplatform voor digitale systemen. FPGA s zijn geïntegreerde schakelingen die geprogrammeerd of geconfigureerd kunnen
Medianet Vlaanderen 10 mei 2016
 Medianet Vlaanderen 10 mei 2016 Inhoud Waarom digitale radio? Waarom DAB+? Technologie achter DAB+ Conclusies Waarom digitale radio? Het analoge tijdperk is voorbij Muziek Video Televisie Radio FM heeft
Medianet Vlaanderen 10 mei 2016 Inhoud Waarom digitale radio? Waarom DAB+? Technologie achter DAB+ Conclusies Waarom digitale radio? Het analoge tijdperk is voorbij Muziek Video Televisie Radio FM heeft
DSLSTL. Handleiding Copyright 2008. Handleiding DSLSTL Pagina 1 of 11
 DSLSTL Handleiding Copyright 2008 Handleiding DSLSTL Pagina 1 of 11 1 Versie beheer...3 2 Algemene omschrijving DSLSTL...4 3 Gebruik achter een router en/of firewall...5 4 Installeren van de software...6
DSLSTL Handleiding Copyright 2008 Handleiding DSLSTL Pagina 1 of 11 1 Versie beheer...3 2 Algemene omschrijving DSLSTL...4 3 Gebruik achter een router en/of firewall...5 4 Installeren van de software...6
Appendix A Productspecificaties PRODUCTSPECIFICATIES
 A P P E N D I X A PRODUCTSPECIFICATIES A-1 Processor Core Logic Geheugentype Standaard Geheugenuitbreiding Processor en Core Logic Mobile Intel Pentium M (Banias), 1.5GHz-1.6GHz, 1 MB L2 met foutcorrectie
A P P E N D I X A PRODUCTSPECIFICATIES A-1 Processor Core Logic Geheugentype Standaard Geheugenuitbreiding Processor en Core Logic Mobile Intel Pentium M (Banias), 1.5GHz-1.6GHz, 1 MB L2 met foutcorrectie
Functionele beschrijving: scannen naar UNIT4 Cura Documentmanagement.
 Functionele beschrijving: scannen naar UNIT4 Cura Documentmanagement. Algemeen Met KYOCERA scannen naar UNIT4 Cura Documentmanagement beschikt u over een efficiënte oplossing om uw documenten te scannen
Functionele beschrijving: scannen naar UNIT4 Cura Documentmanagement. Algemeen Met KYOCERA scannen naar UNIT4 Cura Documentmanagement beschikt u over een efficiënte oplossing om uw documenten te scannen
Hoofdstuk 4 : BESLISSINGSDIAGRAM
 Hoofdstuk 4 : BESLISSINGSDIAGRAM 4.1. Inleiding. Om te komen tot het resultaat dat we in het kader van dit eindwerk hebben bereikt, moesten we een studie maken van de bestaande methodes en op basis hiervan
Hoofdstuk 4 : BESLISSINGSDIAGRAM 4.1. Inleiding. Om te komen tot het resultaat dat we in het kader van dit eindwerk hebben bereikt, moesten we een studie maken van de bestaande methodes en op basis hiervan
Functionele beschrijving: scannen naar Exact Globe.
 Functionele beschrijving: scannen naar Exact Globe. Algemeen Met de KYOCERA scannen naar Exact Globe beschikt u over een efficiënte oplossing om uw documenten te scannen naar Exact Globe. Met deze oplossing
Functionele beschrijving: scannen naar Exact Globe. Algemeen Met de KYOCERA scannen naar Exact Globe beschikt u over een efficiënte oplossing om uw documenten te scannen naar Exact Globe. Met deze oplossing
Het besturingssysteem of operating system, vaak afgekort tot OS is verantwoordelijk voor de communicatie van de software met de hardware.
 Het besturingssysteem of operating system, vaak afgekort tot OS is verantwoordelijk voor de communicatie van de software met de hardware. Het vormt een schil tussen de applicatiesoftware en de hardware
Het besturingssysteem of operating system, vaak afgekort tot OS is verantwoordelijk voor de communicatie van de software met de hardware. Het vormt een schil tussen de applicatiesoftware en de hardware
Raspberry pi snel start handleiding
 Raspberry pi snel start handleiding G.L.J. Quellhorst V _NL_2.0 Maart 2 0 15 Raspberry pi, snel start handleiding Deze informatie is onder ander verkrijgbaar via: http://www.raspberrypi.org http://www.zoekutuit.nl
Raspberry pi snel start handleiding G.L.J. Quellhorst V _NL_2.0 Maart 2 0 15 Raspberry pi, snel start handleiding Deze informatie is onder ander verkrijgbaar via: http://www.raspberrypi.org http://www.zoekutuit.nl
Modem en Codec. Telematica. Amplitude-modulatie. Frequentie-modulatie. Soorten modems. Fase-modulatie
 Modem en Codec Telematica Data Transmissie (Fysieke laag) Hoofdstuk 6 t/m 8 Een modem gebruikt analoge signalen om digitale signalen te versturen Een codec gebruikt digitale signalen om analoge signalen
Modem en Codec Telematica Data Transmissie (Fysieke laag) Hoofdstuk 6 t/m 8 Een modem gebruikt analoge signalen om digitale signalen te versturen Een codec gebruikt digitale signalen om analoge signalen
Functionele beschrijving: scannen naar UNIT4 DocumentManager
 Functionele beschrijving: scannen naar UNIT4 DocumentManager Algemeen Met de KYOCERA Scannen naar UNIT4 DocumentManager beschikt u over een efficiënte oplossing om uw documenten te scannen naar UNIT4 DocumentManager
Functionele beschrijving: scannen naar UNIT4 DocumentManager Algemeen Met de KYOCERA Scannen naar UNIT4 DocumentManager beschikt u over een efficiënte oplossing om uw documenten te scannen naar UNIT4 DocumentManager
Gebruikershandleiding Axitour AT-900 audio communicatiesysteem
 Gebruikershandleiding Axitour AT-900 audio communicatiesysteem 1. Algemene informatie 1.1 Introductie Het Axitour AT-900 audio communicatiesysteem is een van de meest geavanceerde rondleidingsystemen op
Gebruikershandleiding Axitour AT-900 audio communicatiesysteem 1. Algemene informatie 1.1 Introductie Het Axitour AT-900 audio communicatiesysteem is een van de meest geavanceerde rondleidingsystemen op
Plugwise binnen de zakelijke omgeving
 Plugwise binnen de zakelijke omgeving Plugwise is een gebruiksvriendelijk energiemanagementsysteem voor de zakelijke markt. Per stopcontact wordt er gemeten hoeveel elektriciteit er verbruikt wordt en
Plugwise binnen de zakelijke omgeving Plugwise is een gebruiksvriendelijk energiemanagementsysteem voor de zakelijke markt. Per stopcontact wordt er gemeten hoeveel elektriciteit er verbruikt wordt en
Nederlandse samenvatting (Dutch summary)
") Nederlandse samenvatting (Dutch summary) Ditproefschriftpresenteerteen raamwerk voorhetontwikkelenvanparallellestreaming applicaties voor heterogene architecturen met meerdere rekeneenheden op een chip.
Nederlandse samenvatting (Dutch summary) Ditproefschriftpresenteerteen raamwerk voorhetontwikkelenvanparallellestreaming applicaties voor heterogene architecturen met meerdere rekeneenheden op een chip.
Functionele beschrijving: Scannen naar AFAS Profit.
 Functionele beschrijving: Scannen naar AFAS Profit. Algemeen Met de Kyocera Scannen naar AFAS Profit beschikt u over een efficiënte oplossing om uw documenten te scannen naar AFAS Profit. Met deze oplossing
Functionele beschrijving: Scannen naar AFAS Profit. Algemeen Met de Kyocera Scannen naar AFAS Profit beschikt u over een efficiënte oplossing om uw documenten te scannen naar AFAS Profit. Met deze oplossing
De Arduino-microcontroller in de motorvoertuigentechniek (4)
") De Arduino-microcontroller in de motorvoertuigentechniek () E. Gernaat (ISBN 978-90-7930--6) De Atmel ATmega38/P microcontroller. Uitvoering De ATmega38 is een microprocessor van de Amerikaanse firma ATMEL
De Arduino-microcontroller in de motorvoertuigentechniek () E. Gernaat (ISBN 978-90-7930--6) De Atmel ATmega38/P microcontroller. Uitvoering De ATmega38 is een microprocessor van de Amerikaanse firma ATMEL
Arduino CURSUS. door Willy - 09-juni-2017
 Arduino CURSUS door Willy - w2@skynet.be, 09-juni-2017 OVERZICHT (1) OVERZICHT (2) Historiek Microcontroller (1) Microcontroller (2) Specificaties - Arduino UNO bord Specificaties - ATmega328P chip LET
Arduino CURSUS door Willy - w2@skynet.be, 09-juni-2017 OVERZICHT (1) OVERZICHT (2) Historiek Microcontroller (1) Microcontroller (2) Specificaties - Arduino UNO bord Specificaties - ATmega328P chip LET
Om zelf een live stream op te zetten heb je een aantal dingen nodig:
 How to: Live stream In dit document vind je een uitleg over live streaming video via het internet, tevens bevat het een stap voor stap beschrijving om zelf aan de slag te gaan. Het is bedoeld voor zaaleigenaren
How to: Live stream In dit document vind je een uitleg over live streaming video via het internet, tevens bevat het een stap voor stap beschrijving om zelf aan de slag te gaan. Het is bedoeld voor zaaleigenaren
Het moederbord van de zendontvanger "PiligrimPro"
 Ruwe vertaling PA3ECT, deze is niet verantwoordelijk voor vertaal fouten. Het moederbord van de zendontvanger "PiligrimPro" Dankzij de op moderne componenten gebaseerde efficiënte ontwerp technieken, heeft
Ruwe vertaling PA3ECT, deze is niet verantwoordelijk voor vertaal fouten. Het moederbord van de zendontvanger "PiligrimPro" Dankzij de op moderne componenten gebaseerde efficiënte ontwerp technieken, heeft
Functionele beschrijving: scannen naar Trivium FORTUNA.
 Functionele beschrijving: scannen naar Trivium FORTUNA. Algemeen Met KYOCERA scannen naar Trivium FORTUNA beschikt u over een efficiënte oplossing om uw documenten te scannen naar Trivium FORTUNA. Met
Functionele beschrijving: scannen naar Trivium FORTUNA. Algemeen Met KYOCERA scannen naar Trivium FORTUNA beschikt u over een efficiënte oplossing om uw documenten te scannen naar Trivium FORTUNA. Met
Hoe draadloze communicatie zich de afgelopen 20 jaar explosief heeft ontwikkeld
 Hoe draadloze communicatie zich de afgelopen 20 jaar explosief heeft ontwikkeld PLOT presentatie, Juni 2016, Oegstgeest Dr. ir. Jaap C. Haartsen Senior Expert, Wireless Systems Simply Smarter Communications
Hoe draadloze communicatie zich de afgelopen 20 jaar explosief heeft ontwikkeld PLOT presentatie, Juni 2016, Oegstgeest Dr. ir. Jaap C. Haartsen Senior Expert, Wireless Systems Simply Smarter Communications
TECHNISCHE UNIVERSITEIT EINDHOVEN FACULTEIT DER TECHNISCHE NATUURKUNDE
 TECHNISCHE UNIVERSITEIT EINDHOVEN FACULTEIT DER TECHNISCHE NATUURKUNDE Tentamen Computers bij fysische experimenten (3BB20) op dinsdag 25 oktober 2005 Het tentamen duurt 90 minuten en wordt gemaakt zonder
TECHNISCHE UNIVERSITEIT EINDHOVEN FACULTEIT DER TECHNISCHE NATUURKUNDE Tentamen Computers bij fysische experimenten (3BB20) op dinsdag 25 oktober 2005 Het tentamen duurt 90 minuten en wordt gemaakt zonder
Geheugenbeheer. ICT Infrastructuren 2 december 2013
 Geheugenbeheer ICT Infrastructuren 2 december 2013 Doelen van geheugenbeheer Reloca>e (flexibel gebruik van geheugen) Bescherming Gedeeld/gemeenschappelijk geheugen Logische indeling van procesonderdelen
Geheugenbeheer ICT Infrastructuren 2 december 2013 Doelen van geheugenbeheer Reloca>e (flexibel gebruik van geheugen) Bescherming Gedeeld/gemeenschappelijk geheugen Logische indeling van procesonderdelen
Netwerk Interfacing Data Logging.
 Handleiding Netwerk Interfacing Data Logging. EduTechSoft.nl 2009-2010 H.O.Boorsma. Pagina - 2 - Netwerk Interfacing Data Logging Pagina - 3 - Inhoud Inleiding.... 4 Beschrijving van het programma....
Handleiding Netwerk Interfacing Data Logging. EduTechSoft.nl 2009-2010 H.O.Boorsma. Pagina - 2 - Netwerk Interfacing Data Logging Pagina - 3 - Inhoud Inleiding.... 4 Beschrijving van het programma....
XAMPP Web Development omgeving opzetten onder Windows.
 XAMPP Web Development omgeving opzetten onder Windows. Inhoudsopgave 1. Lees dit eerst... 2 2. Inleiding... 2 1 Xampp downloaden... 2 2 Installatie Xampp 1.7.4 op externe harddisk... 3 3 XAMPP herconfiguren...
XAMPP Web Development omgeving opzetten onder Windows. Inhoudsopgave 1. Lees dit eerst... 2 2. Inleiding... 2 1 Xampp downloaden... 2 2 Installatie Xampp 1.7.4 op externe harddisk... 3 3 XAMPP herconfiguren...
Digitale opslag. Wat als er geen tape meer bestaat? 20 maart 2013
 Digitale opslag Wat als er geen tape meer bestaat? 20 maart 2013 Digitale opslag Het einde van de tape Kostprijs Betrouwbaarheid Compressie De ideale oplossing Gratis kan ook Het einde van de tape Sinds
Digitale opslag Wat als er geen tape meer bestaat? 20 maart 2013 Digitale opslag Het einde van de tape Kostprijs Betrouwbaarheid Compressie De ideale oplossing Gratis kan ook Het einde van de tape Sinds
Functionele beschrijving: scannen naar van Brug software.
 Functionele beschrijving: scannen naar van Brug software. Algemeen Met de KYOCERA scannen naar van Brug Software beschikt u over een efficiënte oplossing om uw documenten te scannen naar het Notarieel
Functionele beschrijving: scannen naar van Brug software. Algemeen Met de KYOCERA scannen naar van Brug Software beschikt u over een efficiënte oplossing om uw documenten te scannen naar het Notarieel
Functionele beschrijving: Scannen naar Pro Management
 Functionele beschrijving: Scannen naar Pro Management Algemeen Met de KYOCERA scannen naar oplossing beschikt u over een efficiënte oplossing om uw documenten te scannen naar Pro Management. Met deze oplossing
Functionele beschrijving: Scannen naar Pro Management Algemeen Met de KYOCERA scannen naar oplossing beschikt u over een efficiënte oplossing om uw documenten te scannen naar Pro Management. Met deze oplossing
informatica. hardware. overzicht. moederbord CPU RAM GPU architectuur (vwo)
") informatica hardware overzicht moederbord CPU RAM GPU architectuur (vwo) 1 moederbord basis van de computer componenten & aansluitingen chipset Northbridge (snel) Southbridge ("traag") bussen FSB/HTB moederbord
informatica hardware overzicht moederbord CPU RAM GPU architectuur (vwo) 1 moederbord basis van de computer componenten & aansluitingen chipset Northbridge (snel) Southbridge ("traag") bussen FSB/HTB moederbord
Functionele beschrijving: Scannen naar Fidura-oplossing
 Functionele beschrijving: Scannen naar Fidura-oplossing Algemeen Met KYOCERA scannen naar Fidura beschikt u over een efficiënte oplossing om uw documenten te scannen naar Fidura. Met deze oplossing kunnen
Functionele beschrijving: Scannen naar Fidura-oplossing Algemeen Met KYOCERA scannen naar Fidura beschikt u over een efficiënte oplossing om uw documenten te scannen naar Fidura. Met deze oplossing kunnen
Wat zien we in deze cursus
 Algemeen patrick.dujardin@hetcvo.be Educatief verlof Opleidingscheques Pauze tussen 19h45 en 20h15 Elke week van 18h tot 21h20 (uitgezonderd schoolvakanties) op dinsdagavond 4 tussen evaluaties en 1 eindevaluatie
Algemeen patrick.dujardin@hetcvo.be Educatief verlof Opleidingscheques Pauze tussen 19h45 en 20h15 Elke week van 18h tot 21h20 (uitgezonderd schoolvakanties) op dinsdagavond 4 tussen evaluaties en 1 eindevaluatie
De computer als processor
 De computer als processor DE FYSIEKE COMPUTER Componenten van de computerconfiguratie Toetsenbord Muis Scanner Microfoon (Extern geheugen) Invoerapparaten Uitvoerapparaten Monitor Printer Plotter Luidspreker
De computer als processor DE FYSIEKE COMPUTER Componenten van de computerconfiguratie Toetsenbord Muis Scanner Microfoon (Extern geheugen) Invoerapparaten Uitvoerapparaten Monitor Printer Plotter Luidspreker
Alvorens in te gaan op het zelfbouwproject Lima SDR eerst iets over de techniek en de
 Lima SDR Inleiding Alvorens in te gaan op het zelfbouwproject Lima SDR eerst iets over de techniek en de mogelijkheden van een SDR. Door de opkomst van SDR (de Engelse afkorting voor Software DefinedRadio)
Lima SDR Inleiding Alvorens in te gaan op het zelfbouwproject Lima SDR eerst iets over de techniek en de mogelijkheden van een SDR. Door de opkomst van SDR (de Engelse afkorting voor Software DefinedRadio)
Schriftelijk tentamen Digitale Telecommunicatie Technieken (5LL20) en Telecommunicatie Techniek (5LL50) op dinsdag 14 juni 2005 van
 en Telecommunicatie Techniek (5LL50) op dinsdag 14 juni 2005 van") Schriftelijk tentamen Digitale Telecommunicatie Technieken (5LL20) en Telecommunicatie Techniek (5LL50) op dinsdag 14 juni 2005 van 14.00-17.00 uur Studenten die in het nieuwe vak (5LL50) tentamen doen
Schriftelijk tentamen Digitale Telecommunicatie Technieken (5LL20) en Telecommunicatie Techniek (5LL50) op dinsdag 14 juni 2005 van 14.00-17.00 uur Studenten die in het nieuwe vak (5LL50) tentamen doen
Microcontrollers. Robert Langenhuysen, PA0RYL
 Microcontrollers Robert Langenhuysen, PA0RYL 1 RF Seminar B&D 2013 Eisen Niet al te ingewikkeld Kits, geschikt voor experimenteren, rapid prototyping, etc. I/O mogelijkheden HDMI, VGA, SD, analoog, digital,
Microcontrollers Robert Langenhuysen, PA0RYL 1 RF Seminar B&D 2013 Eisen Niet al te ingewikkeld Kits, geschikt voor experimenteren, rapid prototyping, etc. I/O mogelijkheden HDMI, VGA, SD, analoog, digital,
Microcontrollers Week 1 Introductie microcontroller Jesse op den Brouw INLMIC/2014-2015
 Microcontrollers Week 1 Introductie microcontroller Jesse op den Brouw INLMIC/2014-2015 Computersysteem Een systeem dat rekenkundige operaties, data manipulaties en beslissingen kan uitvoeren, aan de hand
Microcontrollers Week 1 Introductie microcontroller Jesse op den Brouw INLMIC/2014-2015 Computersysteem Een systeem dat rekenkundige operaties, data manipulaties en beslissingen kan uitvoeren, aan de hand
FAQ Aura Client/Server
 FAQ Aura Client/Server Wat is een Client/Server applicatie? Een Client/Server applicatie (ook wel C/S genoemd) is een software applicatie die op een efficiënte manier gebruikmaakt van zogenaamde clients
FAQ Aura Client/Server Wat is een Client/Server applicatie? Een Client/Server applicatie (ook wel C/S genoemd) is een software applicatie die op een efficiënte manier gebruikmaakt van zogenaamde clients
Professional services
 Prijzen verhuur 3e kwartaal 2015 De Teradek Cube wordt op een camera geplaatst en genereert een H.264 videostream die live bekeken kan worden op een tablet of computer, binnen de range van de ingebouwde
Prijzen verhuur 3e kwartaal 2015 De Teradek Cube wordt op een camera geplaatst en genereert een H.264 videostream die live bekeken kan worden op een tablet of computer, binnen de range van de ingebouwde
Departement industriële wetenschappen en technologie
 Departement industriële wetenschappen en technologie Universitaire Campus, gebouw B B-3590 DIEPENBEEK Tel.: 011-23 07 90 Fax: 011-23 07 99 Aansturen en testen van een hybride infrarood beeldopnemer Abstract
Departement industriële wetenschappen en technologie Universitaire Campus, gebouw B B-3590 DIEPENBEEK Tel.: 011-23 07 90 Fax: 011-23 07 99 Aansturen en testen van een hybride infrarood beeldopnemer Abstract
De AT90CAN microprocessor van ATMEL in de motorvoertuigentechniek (4)
") De AT90CAN microprocessor van ATMEL in de motorvoertuigentechniek (4) Timloto o.s. / E. Gernaat / ISBN 978-90-79302-06-2 Op dit werk is de Creative Commens Licentie van toepassing. Uitgave: september 2012
De AT90CAN microprocessor van ATMEL in de motorvoertuigentechniek (4) Timloto o.s. / E. Gernaat / ISBN 978-90-79302-06-2 Op dit werk is de Creative Commens Licentie van toepassing. Uitgave: september 2012
Opgave Tussentijdse Oefeningen Jaarproject I Reeks 4: Lcd Interface & Files
 Opgave Tussentijdse Oefeningen Jaarproject I Reeks 4: Lcd Interface & Files 1 Introductie In deze oefening zal je je LCD display leren aansturen. Je controleert deze display door er instructies naar te
Opgave Tussentijdse Oefeningen Jaarproject I Reeks 4: Lcd Interface & Files 1 Introductie In deze oefening zal je je LCD display leren aansturen. Je controleert deze display door er instructies naar te
Hoogfrequent technieken.
 Hoogfrequent technieken. .. Inleiding. Hoofdstuk : Inleiding Mensen of machines moeten in sommige omstandigheden met elkaar communiceren. Door communicatie kan video, spraak en computer gegevens onderling
Hoogfrequent technieken. .. Inleiding. Hoofdstuk : Inleiding Mensen of machines moeten in sommige omstandigheden met elkaar communiceren. Door communicatie kan video, spraak en computer gegevens onderling
Module 1: Wat is een Raspberry Pi?
 Module 1: Wat is een Raspberry Pi? Inhoudsopgave Module 1: Wat is een Raspberry Pi?...1 Wat is een Raspberry Pi?...2 Wat is er zo bijzonder aan de Raspberry Pi?...2 Wie zitten er achter de Raspberry Pi...2
Module 1: Wat is een Raspberry Pi? Inhoudsopgave Module 1: Wat is een Raspberry Pi?...1 Wat is een Raspberry Pi?...2 Wat is er zo bijzonder aan de Raspberry Pi?...2 Wie zitten er achter de Raspberry Pi...2
OSB Brugge 03/06/2016
 Introductie Fusion-C4FM OSB Brugge 03/06/2016 Vergelijking digitale systemen D-STAR DMR Fusion Vocoder AMBE+ AMBE+2 AMBE+2 FEC Voice Only Voice Only Voice Only Modulatie GMSK 4FSK C4FM Multiplex Methode
Introductie Fusion-C4FM OSB Brugge 03/06/2016 Vergelijking digitale systemen D-STAR DMR Fusion Vocoder AMBE+ AMBE+2 AMBE+2 FEC Voice Only Voice Only Voice Only Modulatie GMSK 4FSK C4FM Multiplex Methode
Accelerometer project 2010 Microcontroller printje op basis van de NXP-LPC2368
 Accelerometer project 2010 Microcontroller printje op basis van de NXP-LPC2368 Handleiding bij het gebruik van een microcontroller in het Accelerometerproject (Project II) Er zijn speciaal voor het Accelerometerproject
Accelerometer project 2010 Microcontroller printje op basis van de NXP-LPC2368 Handleiding bij het gebruik van een microcontroller in het Accelerometerproject (Project II) Er zijn speciaal voor het Accelerometerproject
aanhangsel A productspecificatie PRODUCTSPECIFICATIES A-1
 A A N H A N G S E L A PRODUCTSPECIFICATIES A-1 Processor Core Logic Processor en Core Logic Mobile Intel Pentium M Dual Core Processor (Yonah), up to 2.16GHz, 2 MB L2 cache of Mobile Intel Pentium M Single
A A N H A N G S E L A PRODUCTSPECIFICATIES A-1 Processor Core Logic Processor en Core Logic Mobile Intel Pentium M Dual Core Processor (Yonah), up to 2.16GHz, 2 MB L2 cache of Mobile Intel Pentium M Single
Temperatuur logger synchronisatie
 Temperatuur logger synchronisatie Juni 10, 2010 1 / 7 Temperatuur logger synchronisatie Introductie Twee of meerdere ontvangers van het Multilogger systeem kunnen met de temperature logger synchronisatie
Temperatuur logger synchronisatie Juni 10, 2010 1 / 7 Temperatuur logger synchronisatie Introductie Twee of meerdere ontvangers van het Multilogger systeem kunnen met de temperature logger synchronisatie
Onderzoek Migratie Windows NT voor Wegontwerpafdelingen in Rijkswaterstaat
 C8108 BIBLIOTHEEK Bouwdienst Rijkswaterstaat Postbus 20.000 3502 LA Utrecht Onderzoek Migratie Windows NT voor Wegontwerpafdelingen in Rijkswaterstaat Keuze voor Windows NT BIBLIOTHEEK BOUWOiENST RI.IKSWATERSTAAT
C8108 BIBLIOTHEEK Bouwdienst Rijkswaterstaat Postbus 20.000 3502 LA Utrecht Onderzoek Migratie Windows NT voor Wegontwerpafdelingen in Rijkswaterstaat Keuze voor Windows NT BIBLIOTHEEK BOUWOiENST RI.IKSWATERSTAAT
DIGITALE MODE MET POWER SDR
 DIGITALE MODE MET POWER SDR Als u een SDR tranceiver of ontvanger in gebruik heeft, is het misschien ook leuk om de digitale modi zoals BPSK31, RTTY enz. enz. te kunnen ontvangen en zenden. We beperken
DIGITALE MODE MET POWER SDR Als u een SDR tranceiver of ontvanger in gebruik heeft, is het misschien ook leuk om de digitale modi zoals BPSK31, RTTY enz. enz. te kunnen ontvangen en zenden. We beperken
Peripheral Interface Controllers. BRAC clubavond 5-105 PE2WDO
 Peripheral Interface Controllers -10 PE2WDO Programma Introductie Wat is een PIC Wat heb je nodig om te beginnen Praktijkopdrachten: Voorbeeld met uitleg Opdrachten pag. 2 Wat is een PIC Programmable Intelligent
Peripheral Interface Controllers -10 PE2WDO Programma Introductie Wat is een PIC Wat heb je nodig om te beginnen Praktijkopdrachten: Voorbeeld met uitleg Opdrachten pag. 2 Wat is een PIC Programmable Intelligent
HTML. Media. Hans Roeyen V 3.0
 Media Hans Roeyen V 3.0 12 maart 2015 Inhoud 1. (Multi)Media op websites... 3 2. Flash en Websites... 4 3. Video op je website... 4 3.1. YouTube insluiten op de pagina... 4 3.2. Video zonder YouTube...
Media Hans Roeyen V 3.0 12 maart 2015 Inhoud 1. (Multi)Media op websites... 3 2. Flash en Websites... 4 3. Video op je website... 4 3.1. YouTube insluiten op de pagina... 4 3.2. Video zonder YouTube...
Standalone video opname en streaming - HDMI of Component p - USB 2.0
 Standalone video opname en streaming - HDMI of Component - 1080p - USB 2.0 Product ID: USB2HDCAPS Met dit high-definition opnameapparaat kunt u een HDMI- of component videobron opnemen, met audio, via
Standalone video opname en streaming - HDMI of Component - 1080p - USB 2.0 Product ID: USB2HDCAPS Met dit high-definition opnameapparaat kunt u een HDMI- of component videobron opnemen, met audio, via
Variability in Multi-tenant SaaS Applications:
 Variability in Multi-tenant SaaS Applications: Gastcollege voor het vak Product Software Jaap Kabbedijk, MSc. Universiteit Utrecht, Nederland 1 Wat gaan we behandelen? Introductie Uitleg ontwikkeling SaaS
Variability in Multi-tenant SaaS Applications: Gastcollege voor het vak Product Software Jaap Kabbedijk, MSc. Universiteit Utrecht, Nederland 1 Wat gaan we behandelen? Introductie Uitleg ontwikkeling SaaS
Wat is een busverbinding?
 Wat is een busverbinding? gemeenschappelijke verbinding tussen CPU, geheugen en I/O-schakelingen onderscheid tussen: databus/adresbus/controlbus intern/extern serieel/parallel unidirectioneel/bidirectioneel
Wat is een busverbinding? gemeenschappelijke verbinding tussen CPU, geheugen en I/O-schakelingen onderscheid tussen: databus/adresbus/controlbus intern/extern serieel/parallel unidirectioneel/bidirectioneel
OPTIMALISATIE VAN MPEG-4-WAVELETCODE VOOR DE TRIMEDIAPROCESSOR
 E99/EL/VLSI1 Diepenbeek, 1 juni 1999 OPTIMALISATIE VAN MPEG-4-WAVELETCODE VOOR DE TRIMEDIAPROCESSOR Abstract van het eindwerk van Bert BRANS en Benjamin GOYVAERTS Industrieel Ingenieur Elektriciteit optie
E99/EL/VLSI1 Diepenbeek, 1 juni 1999 OPTIMALISATIE VAN MPEG-4-WAVELETCODE VOOR DE TRIMEDIAPROCESSOR Abstract van het eindwerk van Bert BRANS en Benjamin GOYVAERTS Industrieel Ingenieur Elektriciteit optie
Tim Mallezie Architectuur van besturingssystemen: Vraag A2.
 Procesbeheer: kenmerken van moderne besturingssystemen. 1. Bespreek de (drie) meest typische kenmerken van moderne besturingssystemen. 2. In hoeverre beantwoorden UNIX, Linux en Windows NT hieraan? Geef
Procesbeheer: kenmerken van moderne besturingssystemen. 1. Bespreek de (drie) meest typische kenmerken van moderne besturingssystemen. 2. In hoeverre beantwoorden UNIX, Linux en Windows NT hieraan? Geef
 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 Met bandje vraagt veel minder rekenkracht van de PC (Zowel in DV=Avials HD= MPEG2). HDV1=1280x720p HDV2=1440x1080i. Een bandje moet vanaf de camera via Firewire(ook
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 Met bandje vraagt veel minder rekenkracht van de PC (Zowel in DV=Avials HD= MPEG2). HDV1=1280x720p HDV2=1440x1080i. Een bandje moet vanaf de camera via Firewire(ook
ES1 Project 1: Microcontrollers
 ES1 Project 1: Microcontrollers Les 5: Timers/counters & Interrupts Timers/counters Hardware timers/counters worden in microcontrollers gebruikt om onafhankelijk van de CPU te tellen. Hierdoor kunnen andere
ES1 Project 1: Microcontrollers Les 5: Timers/counters & Interrupts Timers/counters Hardware timers/counters worden in microcontrollers gebruikt om onafhankelijk van de CPU te tellen. Hierdoor kunnen andere
Jen Kegels, Eveline De Wilde, Inge Platteaux, Tamara Van Marcke. Hardware. De computer in een oogopslag. 1 / 11 Cursusontwikkeling
 Hardware De computer in een oogopslag 1 / 11 Cursusontwikkeling Opslag Er worden verschillende apparaten gebruikt om gegevens op te slaan. Dit zijn de meest voorkomende apparaten. Harde schijf; CD / DVD;
Hardware De computer in een oogopslag 1 / 11 Cursusontwikkeling Opslag Er worden verschillende apparaten gebruikt om gegevens op te slaan. Dit zijn de meest voorkomende apparaten. Harde schijf; CD / DVD;
Les B-04 Het moederbord
 Les B-04 Het moederbord David Lans, 2010 4.0. Doel Nu we weten hoe de processor opdrachten verwerkt kunnen we bekijken hoe de processor met de overige componenten van de computer is verbonden. In deze
Les B-04 Het moederbord David Lans, 2010 4.0. Doel Nu we weten hoe de processor opdrachten verwerkt kunnen we bekijken hoe de processor met de overige componenten van de computer is verbonden. In deze
Klasse B output buffer voor een Flat Panel Display Kolom aansturing
 Gevalstudie 1 Klasse B output buffer voor een Flat Panel Display Kolom aansturing IEEE Journal of Solid-state circuits, Vol 34, No 1, Januari 1999, pp 116-119 Jan Genoe KHLim Flat Panel display kolom driver
Gevalstudie 1 Klasse B output buffer voor een Flat Panel Display Kolom aansturing IEEE Journal of Solid-state circuits, Vol 34, No 1, Januari 1999, pp 116-119 Jan Genoe KHLim Flat Panel display kolom driver
Meten en analyseren van Broadcast netwerken. door: Thorwald de Boer
 Meten en analyseren van Broadcast netwerken. door: Thorwald de Boer Overzicht Overzicht Broadband netwerken DVB standaarden Signaal typen Wat willen we meten? Hoe meten we het? Antenne meetsysteem Huidige
Meten en analyseren van Broadcast netwerken. door: Thorwald de Boer Overzicht Overzicht Broadband netwerken DVB standaarden Signaal typen Wat willen we meten? Hoe meten we het? Antenne meetsysteem Huidige
Combinatorische schakelingen
 Practicum 1: Combinatorische schakelingen Groep A.6: Lennert Acke Pieter Schuddinck Kristof Vandoorne Steven Werbrouck Inhoudstabel 1. Doelstellingen... 2 2. Voorbereiding... 3 3. Hardware-practicum...
Practicum 1: Combinatorische schakelingen Groep A.6: Lennert Acke Pieter Schuddinck Kristof Vandoorne Steven Werbrouck Inhoudstabel 1. Doelstellingen... 2 2. Voorbereiding... 3 3. Hardware-practicum...
STORAGE AUTOMATION IT MANAGEMENT & OPTIMIZATION DATAGROEI DE BAAS MET EXTREEM BEHEERGEMAK DOOR AUTOMATISERING EN VIRTUALISATIE
 IT MANAGEMENT & OPTIMIZATION STORAGE AUTOMATION DATAGROEI DE BAAS MET EXTREEM BEHEERGEMAK DOOR AUTOMATISERING EN VIRTUALISATIE EEN EFFECTIEVE EN KOSTENEFFICIËNTE OPLOSSING VOOR DATAGROEI De druk op systeembeheerders
IT MANAGEMENT & OPTIMIZATION STORAGE AUTOMATION DATAGROEI DE BAAS MET EXTREEM BEHEERGEMAK DOOR AUTOMATISERING EN VIRTUALISATIE EEN EFFECTIEVE EN KOSTENEFFICIËNTE OPLOSSING VOOR DATAGROEI De druk op systeembeheerders
uw ICT partner ADSL Home en Business
 uw ICT partner ADSL Home en Business ADSL Home en Business Inhoudsopgave Inhoudsopgave 1 1.0 Introductie 2 1.1 Wat is DSL 2 1.2 Hoe werkt DSL 2 1.3 ADSL is de Asymmetrische variant van de DSL techniek
uw ICT partner ADSL Home en Business ADSL Home en Business Inhoudsopgave Inhoudsopgave 1 1.0 Introductie 2 1.1 Wat is DSL 2 1.2 Hoe werkt DSL 2 1.3 ADSL is de Asymmetrische variant van de DSL techniek
Hoe zet u virtualisatie slim in bij forensische onderzoeksomgevingen?
 Hoe zet u virtualisatie slim in bij forensische onderzoeksomgevingen? ir. Ronald van Vugt ronald@netwell.eu Aanleiding Deze presentatie is ontstaan naar aanleiding van een nieuw architectuur ontwerp voor
Hoe zet u virtualisatie slim in bij forensische onderzoeksomgevingen? ir. Ronald van Vugt ronald@netwell.eu Aanleiding Deze presentatie is ontstaan naar aanleiding van een nieuw architectuur ontwerp voor
Camera Link. Samenvatting van de Camera Link standard Voor het aansluiten van Digitale cameras op Frame Grabbers. Opmerkingen
 Camera Link Samenvatting van de Camera Link standard Voor het aansluiten van Digitale cameras op Frame Grabbers Opmerkingen Dit document is slechts een samenvatting en heeft geen enkele officiële waarde.
Camera Link Samenvatting van de Camera Link standard Voor het aansluiten van Digitale cameras op Frame Grabbers Opmerkingen Dit document is slechts een samenvatting en heeft geen enkele officiële waarde.
RTC Pick & Place Beckhoff TwinCAT. Voorbereiding
 Voorbereiding Beckhoff Automation bvba Belgium Rudi Grouset v2.1-13/09/2013 Voorbereiding voor het volgen van de Beckhoff training Om de opleidingsdagen bij Beckhoff succesvol te laten doorgaan vragen
Voorbereiding Beckhoff Automation bvba Belgium Rudi Grouset v2.1-13/09/2013 Voorbereiding voor het volgen van de Beckhoff training Om de opleidingsdagen bij Beckhoff succesvol te laten doorgaan vragen
Lab6: Implementatie video timing generator
 Het Micro-elektronica Trainings- Centrum Het MTC is een initiatief binnen de INVOMEC divisie. Industrialisatie & Vorming in Micro-elektronica Inleiding In de vorige modules werd een systeem opgebouwd en
Het Micro-elektronica Trainings- Centrum Het MTC is een initiatief binnen de INVOMEC divisie. Industrialisatie & Vorming in Micro-elektronica Inleiding In de vorige modules werd een systeem opgebouwd en
Uitgebreid eindwerkvoorstel Lokaliseren van personen en objecten met behulp van camera s
 Uitgebreid eindwerkvoorstel Lokaliseren van personen en objecten met behulp van camera s Sofie De Cooman 21 December 2006 Stagebedrijf: Interne begeleider: Externe begeleider: BarcoView Koen Van De Wiele
Uitgebreid eindwerkvoorstel Lokaliseren van personen en objecten met behulp van camera s Sofie De Cooman 21 December 2006 Stagebedrijf: Interne begeleider: Externe begeleider: BarcoView Koen Van De Wiele
RTC Opleidingen Beckhoff TwinCAT. Voorbereiding
 Voorbereiding Beckhoff Automation bvba Belgium Rudi Grouset v2.3-05/02/2014 Voorbereiding voor het volgen van de Beckhoff training Om de opleidingsdagen bij Beckhoff succesvol te laten doorgaan vragen
Voorbereiding Beckhoff Automation bvba Belgium Rudi Grouset v2.3-05/02/2014 Voorbereiding voor het volgen van de Beckhoff training Om de opleidingsdagen bij Beckhoff succesvol te laten doorgaan vragen
HiFi over 8,33 khz channel spacing? Ik dacht het niet.
 HiFi over 8,33 khz channel spacing? Ik dacht het niet. Op veler verzoek heb ik me verdiept in het fenomeen 8,33 khz. Waarom komt dit op ons af, en wat betekent dit voor de techniek van zenders en ontvangers.
HiFi over 8,33 khz channel spacing? Ik dacht het niet. Op veler verzoek heb ik me verdiept in het fenomeen 8,33 khz. Waarom komt dit op ons af, en wat betekent dit voor de techniek van zenders en ontvangers.
Geheugenkaartjes. 19 december 2014
 Geheugenkaartjes 19 december 2014 Inhoud Inleiding Geheugenkaartjes bij opname Geheugenkaartjes bij montage Geheugenkaartjes voor opslag en transport 2 Inleiding Video-opslag is technologie die nog steeds
Geheugenkaartjes 19 december 2014 Inhoud Inleiding Geheugenkaartjes bij opname Geheugenkaartjes bij montage Geheugenkaartjes voor opslag en transport 2 Inleiding Video-opslag is technologie die nog steeds
Streamen (bedraad of draadloos) van Desk- en/of Laptop naar TV, Beamer en/of Stereo installatie
 van Desk- en/of Laptop naar TV, Beamer en/of Stereo installatie") Streamen (bedraad of draadloos) van Desk- en/of Laptop naar TV, Beamer en/of Stereo installatie D-Link Logitech A.C.RyanPlyaon!HD Van de vele merken en types behandelen we de A.C.Ryan, omdat deze speler
Streamen (bedraad of draadloos) van Desk- en/of Laptop naar TV, Beamer en/of Stereo installatie D-Link Logitech A.C.RyanPlyaon!HD Van de vele merken en types behandelen we de A.C.Ryan, omdat deze speler
Machinebeheer op afstand. Efficiënt. Wereldwijd. Intuïtief
 NL Machinebeheer op afstand Efficiënt Wereldwijd Intuïtief Beheer en programmeer uw machines op afstand Het is voor u van groot belang dat machines en systemen altijd binnen handbereik zijn, waar dan ook
NL Machinebeheer op afstand Efficiënt Wereldwijd Intuïtief Beheer en programmeer uw machines op afstand Het is voor u van groot belang dat machines en systemen altijd binnen handbereik zijn, waar dan ook
VERENIGINGSWIJZER.NL FINAL DOCUMENT
 Vrije Universiteit Amsterdam Faculteit der Exacte Wetenschappen Project Multimedia Peter van Ulden Studentnr. 1494759 VERENIGINGSWIJZER.NL FINAL DOCUMENT INHOUDSOPGAVE 1 Inleiding...3 2 Aanpak & Techniek...4
Vrije Universiteit Amsterdam Faculteit der Exacte Wetenschappen Project Multimedia Peter van Ulden Studentnr. 1494759 VERENIGINGSWIJZER.NL FINAL DOCUMENT INHOUDSOPGAVE 1 Inleiding...3 2 Aanpak & Techniek...4
1. Inhoud. 2. Installeren en verkennen NAS De eerste vier belangrijke stappen Gebruikersbeheer
 1. Inhoud 2. Installeren en verkennen NAS 14 2.1 Netwerk informatie 15 2.2 Keuze harde schijven 19 2.3 Plaatsen van harde schijven 20 2.4 Besturingssysteem installeren 21 2.5 Volumes en RAID 21 2.6 Inloggen
1. Inhoud 2. Installeren en verkennen NAS 14 2.1 Netwerk informatie 15 2.2 Keuze harde schijven 19 2.3 Plaatsen van harde schijven 20 2.4 Besturingssysteem installeren 21 2.5 Volumes en RAID 21 2.6 Inloggen
Laptop Folder. De prijzen die in deze folder staan vermeld zijn incl. Btw en startklaar geleverd en excl. arbeid en voorrijkosten op locatie.
 Laptop Folder 2017 Dit is onze laptop folder, hierin vindt u verschillende merken maar altijd met minimaal 2 jaar garantie. Deze garantie is op "hardware" en wij geven deze garantie aan "huis". De prijzen
Laptop Folder 2017 Dit is onze laptop folder, hierin vindt u verschillende merken maar altijd met minimaal 2 jaar garantie. Deze garantie is op "hardware" en wij geven deze garantie aan "huis". De prijzen
Converteren van video s
 Converteren van video s Mario Somers Juni 0 In de huidige maatschappij volstaat het niet meer om een videofilm op DV of tape te plaatsen om uit te wisselen met anderen. De evolutie van internet, streaming
Converteren van video s Mario Somers Juni 0 In de huidige maatschappij volstaat het niet meer om een videofilm op DV of tape te plaatsen om uit te wisselen met anderen. De evolutie van internet, streaming
RTC Opleidingen Beckhoff TwinCAT. Voorbereiding
 Voorbereiding Beckhoff Automation bvba Belgium Rudi Grouset v3.3-10/11/2014 Voorbereiding voor het volgen van de Beckhoff training Om de opleidingsdagen bij Beckhoff succesvol te laten doorgaan vragen
Voorbereiding Beckhoff Automation bvba Belgium Rudi Grouset v3.3-10/11/2014 Voorbereiding voor het volgen van de Beckhoff training Om de opleidingsdagen bij Beckhoff succesvol te laten doorgaan vragen
Inhoud. Geschiedenis / evolutie van OpenEmbedded en Yocto Overzicht van de architectuur en concepten Persoonlijke ervaring
 1 Inhoud Geschiedenis / evolutie van OpenEmbedded en Yocto Overzicht van de architectuur en concepten Persoonlijke ervaring 2 Introductie Leon Woestenberg Embedded systeem architect RTOS, Linux, hardware,
1 Inhoud Geschiedenis / evolutie van OpenEmbedded en Yocto Overzicht van de architectuur en concepten Persoonlijke ervaring 2 Introductie Leon Woestenberg Embedded systeem architect RTOS, Linux, hardware,
Thuis het beste beeld en geluid?
 www.hcc.nl/home-entertainment Syllabus home entertainment Thuis het beste beeld en geluid? Deze syllabus geeft achtergrondinformatie over de lezing home entertainment. De onderwerpen die aan bod komen
www.hcc.nl/home-entertainment Syllabus home entertainment Thuis het beste beeld en geluid? Deze syllabus geeft achtergrondinformatie over de lezing home entertainment. De onderwerpen die aan bod komen
PCI Ontwikkelplatformen
 PCI Ontwikkelplatformen Jan Genoe KHLim In dit deel bespreken we de verschillende ontwikkelplatformen die ter beschikking staan om een PCI kaart te ontwikkelen. 1 Ontwikkelplatformen van PCI kaarten Gebruik
PCI Ontwikkelplatformen Jan Genoe KHLim In dit deel bespreken we de verschillende ontwikkelplatformen die ter beschikking staan om een PCI kaart te ontwikkelen. 1 Ontwikkelplatformen van PCI kaarten Gebruik
Radio & Security. Complete Security BVBA. Niet alle 868 MHZ alarmsystemen zijn gelijkwaardig!
 2 Complete Security BVBA Radio & Security Niet alle 868 MHZ alarmsystemen zijn gelijkwaardig! De meest gebruikte frequentie voor SRD (Short Range Device) is 433 MHz. Naast alarmsystemen wordt deze frequentie
2 Complete Security BVBA Radio & Security Niet alle 868 MHZ alarmsystemen zijn gelijkwaardig! De meest gebruikte frequentie voor SRD (Short Range Device) is 433 MHz. Naast alarmsystemen wordt deze frequentie
Software Test Document
 Software Test Document PEN: Paper Exchange Network Software Engineering groep 1 (se1-1415) Academiejaar 2014-2015 Jens Nevens - Sander Lenaerts - Nassim Versbraegen Jo De Neve - Jasper Bevernage Versie
Software Test Document PEN: Paper Exchange Network Software Engineering groep 1 (se1-1415) Academiejaar 2014-2015 Jens Nevens - Sander Lenaerts - Nassim Versbraegen Jo De Neve - Jasper Bevernage Versie
Installatie handleiding
 Installatie handleiding Pagina 2 van 7 1 Inleiding Vanwege de zeer uitgebreide elektronica op Porsche voertuigen is het noodzakelijk dat de diagnosesoftware enorm snel evolueert. De installatie en verdere
Installatie handleiding Pagina 2 van 7 1 Inleiding Vanwege de zeer uitgebreide elektronica op Porsche voertuigen is het noodzakelijk dat de diagnosesoftware enorm snel evolueert. De installatie en verdere
Acer TravelMate 5730G-654G32MN - Core
 TE KOOP: Acer Travelmate 5730G-654G32MN Productbeschrijving Afmetingen (BxDxH) Gewicht Lokalisatie Systeemtype Ingebouwde apparaten Ingebouwde beveiliging Processor Cachegeheugen RAM Specificaties: Acer
TE KOOP: Acer Travelmate 5730G-654G32MN Productbeschrijving Afmetingen (BxDxH) Gewicht Lokalisatie Systeemtype Ingebouwde apparaten Ingebouwde beveiliging Processor Cachegeheugen RAM Specificaties: Acer
Dockingstation, PoE switches, HDMI oplossingen
 Dockingstation PoE switches HDMI oplossingen Eminent levert in haar lijn Business oplossingen die speciaal geschikt zijn voor het gebruik binnen een MKB / KMO omgeving. Continuity betrouwbaarheid, service
Dockingstation PoE switches HDMI oplossingen Eminent levert in haar lijn Business oplossingen die speciaal geschikt zijn voor het gebruik binnen een MKB / KMO omgeving. Continuity betrouwbaarheid, service
CareConnect Fin Pre-requirements
 Pre-requirements Inhoudstafel A. Algemeen... 3 B. Type installaties... 3 C. Hardware en software vereisten... 4 1. PC Clients... 4 2. Terminal Server Clients (Thin Clients)... 4 3. Server... 4 D. Operating
Pre-requirements Inhoudstafel A. Algemeen... 3 B. Type installaties... 3 C. Hardware en software vereisten... 4 1. PC Clients... 4 2. Terminal Server Clients (Thin Clients)... 4 3. Server... 4 D. Operating